1.本实用新型涉及注塑机配件技术领域,更具体的说是涉及一种适用于注塑机的机械手。
背景技术:
2.注塑机在日常使用的过程中,每当加工后的,需要将塑料产品从模具中取出,现有技术中通常是直接将合模机构分离,然后通过顶模机构将产品直接顶出,产品是直接掉落下来的,容易造成损伤,同时现如今一般会将加工好的产品放到生产线的输送带上,直接掉落的方式和输送带的配合难度较大;
3.对于产品的拿取,如今也出现了一些使用机械手的拿取的方式,但是在因为现有的机械手在取出产品的过程中速度很快,产品没有及时冷却就放到输送带上,容易造成输送带损坏的问题。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种适用于注塑机的机械手,用于克服现有技术中的上述缺陷。
5.为实现上述目的,本实用新型提供了如下技术方案:一种适用于注塑机的机械手,包括位置移动机构和吸附组件,所述位置移动机构用于驱动所述吸附组件于输送带和合模机构之间运动;
6.所述吸附组件包括安装块和吸附块,所述安装块与所述吸附块一体成型,所述安装块和所述吸附块中设置有进风管道,所述进风管道的一端开设于所述吸附块背离所述安装块的一侧,所述进风管道另一端伸入所述安装块内,所述安装块内置有若干个与所述进风管道相通的出风管道,若干所述出风管道均贯穿所述安装块,其中所述出风管道的一端朝向与所述进风管道位于所述吸附块上的开口朝向相同,所述出风管道的另一端朝向与所述进风管道位于所述吸附块上的开口朝向不相同,所述进风管道内置有气泵,所述气泵的进风端朝向所述进风管道位于所述吸附块的开口处,所述吸附块背离所述安装块的一侧设置有若干与所述进风管道相通的真空吸盘,所述真空吸盘用于吸附塑料产品,本实用新型相较于传统用于机械手,设置了一种能够吸附塑料产品的机械手,利用了塑料产品重量较轻的特性,同时本实用新型在吸附的过程中,利用里吸附风机的吸风能力,将部分空气从排风管道能够朝向塑料产品的一端排出进行快速降温,这样可以很好得提高塑料产品在机械手运输的过程中冷却速度,而所述出风管道的设置成贯穿所述安装块的方式,并且其两端的朝向不同,这样设置的好处,可以使得吸附在塑料产品的吸力要大于出风管道进行降温一端吹出的空气的气压,这样可以防止因为作用在塑料产品上的风压大于真空吸盘作用在塑料产品的吸力这种情况的发生,使得塑料产品在机械手运输的过程中不会掉落。
7.作为本实用新型的进一步改进,所述位置移动机构包括底座、移动组件、第一转动部和第二转动部,所述移动组件用于驱动所述底座水平方向移动,所述第一转动部设置于
所述底座上,所述第一转动部用于驱动所述吸附组件水平方向转动,所述第二转动部设置于所述第一转动部的转动端,所述第二转动部用于驱动所述吸附组件垂直方向转动,通过所述位移机构,能够满足所述吸附组件的多方位移动,从而满足所述吸附组件能够将塑料产品从所述合模机构送至输送带的需求。
8.作为本实用新型的进一步改进,所述第二转动部的转动端设置有调节组件,所述调节组件包括调节块和移动杆,所述吸附组件设置于所述移动杆的一端,所述移动杆贯穿所述调节块,所述调节块中设置有动力部,所述动力部用于驱动所述移动杆与所述调节块中的位置,以使调节所述吸附组件与所述调节块之间的距离,通常现有技术中的机械手具有若干端,这种机械手虽然可以完成复杂的操作指令,但是其对运算能力有着较高的需求,同时其本身的造价也较为昂贵,本实用新型中设置的所述调节组件,可以根据输送带和合模机构之间的距离来自动调节所述吸附组件和所述第二转动部之间的距离,从而降低了所述机械手对运算能力的需求。
9.作为本实用新型的进一步改进,所述移动杆至少一侧设置有齿条,所述齿条沿所述移动杆长度方向安装,所述动力部包括设置于所述调节块上的动力源,所述动力源的输出端位于所述调节块内,所述动力源的输出端设置有与所述齿条啮合的齿轮,通过齿轮和齿条的方式对所述移动杆位置的调整,满足位置调整的同时,齿轮和齿条上的齿具有很好的限位效果,使得所述移动杆不容易在所述调节块中打滑。
10.作为本实用新型的进一步改进,所述齿轮和所述齿条均设置有两个,且分别位于所述移动杆的上下两侧,所述齿轮和所述齿条一一啮合,这样设置的方式,使得两个齿轮之间具有夹持力,使得所述移动杆的固定效果可以进一步保证。
11.作为本实用新型的进一步改进,所述齿条内嵌或外置于所述移动杆上,这两种方式均能够满足对所述移动杆的驱动,其中外置方式的安装更为容易,内嵌方式具有更好的夹持效果和限位效果。
12.作为本实用新型的进一步改进,所述出风管道的与所述进风管道位于所述吸附块上的开口朝向相同的一端设置有滤网,滤网的设置可以防止工作环境中的颗粒通过气泵喷射到塑料产品的情况,提高了塑料产品的良品率。
13.本实用新型的有益效果:本实用新型相较于传统用于机械手,设置了一种能够吸附塑料产品的机械手,利用了塑料产品重量较轻的特性,同时本实用新型在吸附的过程中,利用里吸附风机的吸风能力,将部分空气从排风管道能够朝向塑料产品的一端排出进行快速降温,这样可以很好得提高塑料产品在机械手运输的过程中冷却速度,而出风管道的设置成贯穿安装块的方式,并且其两端的朝向不同,这样设置的好处,可以使得吸附在塑料产品的吸力要大于出风管道进行降温一端吹出的空气的气压,这样可以防止因为作用在塑料产品上的风压大于真空吸盘作用在塑料产品的吸力这种情况的发生,使得塑料产品在机械手运输的过程中不会掉落。
附图说明
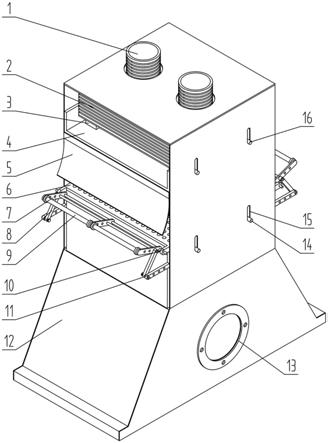
14.图1是本实用新型的主视结构示意图;
15.图2是本实用新型图1中位置移动机构的立体结构示意图;
16.图3是本实用新型图1中a-a方向的剖视图;
17.图4是本实用新型图1中b-b方向的剖视图;
18.图5是本实用新型图3中c-c方向的剖视图;
19.图6是本实用新型图1调节块中内部主视图。
20.附图标记:1、吸附组件;11、安装块;12、吸附块;13、进风管道;14、真空吸盘;15、滤网;16、出风管道;17、气泵;2、位置移动机构;3、移动组件;31、滑轨;32、底座;4、第一转动部;41、立柱;5、第二转动部;6、调节组件;61、调节块;62、移动杆;63、动力部;631、齿轮;632、齿条。
具体实施方式
21.下面结合附图和实施例,对本实用新型进一步详细说明。其中相同的零部件用相同的附图标记表示。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“底面”和“顶面”、“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
22.参照图1-3所示,本实施例的一种适用于注塑机的机械手,包括包括位置移动机构2和吸附组件1,位置移动机构2用于驱动吸附组件1于输送带和合模机构之间运动;
23.吸附组件1包括安装块11和吸附块12,安装块11与吸附块12一体成型,安装块11和吸附块12中设置有进风管道13,进风管道13的一端开设于吸附块12背离安装块11的一侧,进风管道13另一端伸入安装块11内,安装块11内置有若干个与进风管道13相通的出风管道16,若干出风管道16均贯穿安装块11,其中出风管道16的一端朝向与进风管道13位于吸附块12上的开口朝向相同,出风管道16的另一端朝向与进风管道13位于吸附块12上的开口朝向不相同,进风管道13内置有气泵17,气泵17的进风端朝向进风管道13位于吸附块12的开口处,吸附块12背离安装块11的一侧设置有若干与进风管道13相通的真空吸盘14,真空吸盘14用于吸附塑料产品,本实用新型相较于传统用于机械手,设置了一种能够吸附塑料产品的机械手,利用了塑料产品重量较轻的特性,同时本实用新型在吸附的过程中,利用里吸附风机的吸风能力,将部分空气从排风管道能够朝向塑料产品的一端排出进行快速降温,这样可以很好得提高塑料产品在机械手运输的过程中冷却速度,而出风管道16的设置成贯穿安装块11的方式,并且其两端的朝向不同,这样设置的好处,可以使得吸附在塑料产品的吸力要大于出风管道16进行降温一端吹出的空气的气压,这样可以防止因为作用在塑料产品上的风压大于真空吸盘14作用在塑料产品的吸力这种情况的发生,使得塑料产品在机械手运输的过程中不会掉落。
24.在一个实施例中,对于出风管道16来说,其一端开口朝向真空吸盘14,其另一端开口背离真空吸盘14,并且出风管道16是直线开设的,这样设置好处是加工难度较低,直接钻孔机钻通安装块11即可。
25.参照图1-2所示,位置移动机构2包括底座32、移动组件3、第一转动部4和第二转动部5,移动组件3用于驱动底座32水平方向移动,第一转动部4设置于底座32上,第一转动部4用于驱动吸附组件1水平方向转动,第二转动部5设置于第一转动部4的转动端,第二转动部5用于驱动吸附组件1垂直方向转动,通过位移机构,能够满足吸附组件1的多方位移动,从而满足吸附组件1能够将塑料产品从合模机构送至输送带的需求。
26.在一个实施例中,移动组件3包括至少一根滑轨31,底座32设置于滑轨31上,当然
这个滑轨31想要驱动底座32移动的话可以采用电动滑轨31的方式,这种设置的好处可以在合模机构与输送带之间的距离大于移动杆62长度情况下,通过电动滑轨31来进一步满足运输的需求。
27.在一个实施例中,移动组件3可以采用在底座32底部设置若干个万向轮(也可以是电动万向轮)从而来满足底座32移动需求,进一步的万向轮可以采用带有自锁功能的万向轮,从而使得机械手在工作的过程中,其可以固定在原地。
28.在一个实施例中,第一转动部4可以通过电机来完成转动动力的提供,在电机的输出端设置一根垂直设置的立柱41,当然两者的连接处最好在立柱41的轴心处,这样可以使得吸附组件1与底座32之间一段距离,来保证移动杆62在转动的过程中不会与底座32之间发生碰撞。
29.在一个实施例中,第二转动部5可以设置于立柱41的顶端,并且第二转动部5包括电机,电机的输出轴与立柱41之间互相垂直,对于调节块61来说,可以设置于这个电机上。
30.参照图2所示,第二转动部5的转动端设置有调节组件6,调节组件6包括调节块61和移动杆62,吸附组件1设置于移动杆62的一端(可以与安装块11或吸附块12的进行固定连接或可拆卸连接),移动杆62贯穿调节块61,调节块61中设置有动力部63,动力部63用于驱动移动杆62与调节块61中的位置,以使调节吸附组件1与调节块61之间的距离,通常现有技术中的机械手具有若干端,这种机械手虽然可以完成复杂的操作指令,但是其对运算能力有着较高的需求,同时其本身的造价也较为昂贵,本实用新型中设置的调节组件6,可以根据输送带和合模机构之间的距离来自动调节吸附组件1和第二转动部5之间的距离,从而降低了机械手对运算能力的需求。
31.参照图6所示,移动杆62至少一侧设置有齿条632,齿条632沿移动杆62长度方向安装,动力部63包括设置于调节块61上的动力源(可以为电机),动力源的输出端位于调节块61内,动力源的输出端设置有与齿条632啮合的齿轮631,通过齿轮631和齿条632的方式对移动杆62位置的调整,满足位置调整的同时,齿轮631和齿条632上的齿具有很好的限位效果,使得移动杆62不容易在调节块61中打滑。
32.参照图6所示,齿轮631和齿条632均设置有两个,且分别位于移动杆62的上下两侧,齿轮631和齿条632一一啮合,这样设置的方式,使得两个齿轮631之间具有夹持力,使得移动杆62的固定效果可以进一步保证。
33.参照图1所示,齿条632内嵌或外置于移动杆62上,这两种方式均能够满足对移动杆62的驱动,其中外置方式的安装更为容易,内嵌方式具有更好的夹持效果和限位效果。
34.参照图2所示,出风管道16的与进风管道13位于吸附块12上的开口朝向相同的一端设置有滤网15,滤网15的设置可以防止工作环境中的颗粒通过气泵17喷射到塑料产品的情况,提高了塑料产品的良品率。
35.工作原理:当需要将刚制作好的塑料产品放到输送带时,先根据输送带和合模机构之间的距离,将底座32通过移动组件3移动到两者之间的中间距离,然后打开有第一转动部4,使得吸附组件1、输送带、合模机构处于同一垂直面上,接着打开动力源驱动移动杆62移动,从而调整吸附组件1与调节块61之间的距离,使得调节块61和第二转动部5之间的转动直径等于输送带和合模机构之间的距离;
36.若合模机构分离时,塑料产品会位于合模机构突出的部分,此时通过第二转动部5
驱动调节块61、移动杆62和吸附组件1移动,直至吸附组件1对准塑料产品的处,然后打开气泵17,从而通过真空吸盘14将塑料产品吸附,同时气体通过进风管道13进入到出风管道16中,部分气体从出风管道16安装有滤网15的出风端排出,对塑料产品进行降温,与此同时第二转动部5驱动吸附组件1运动到输送带上方,然后关闭气泵17,降温后的塑料产品掉落到输送带上,接着等待下一个塑料产品制作完成再次运输。
37.以上仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。