1.本公开涉及收卷设备以及收卷设备的运转方法。
背景技术:
2.已知在钢带的收卷时,在由设置于收卷机的夹持器把持钢带的前端的状态下,使收卷机旋转而收卷钢带。
3.在专利文献1中记载有为了向张力卷筒(收卷机)的夹持器引导钢带的前端而调节设置于张力卷筒的上游侧的引导台的位置、台面的长度。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平5
‑
42323号公报
7.然而,在引导件位于收卷机的上方(上述的引导台等)的情况下,从引导件导向收卷机的钢带的前端部的位置、形状根据钢种、板厚等而不同。因此,在开始钢带的收卷时,难以在短时间内适当地调整钢带的前端以及插槽的位置以使得钢带的前端进入收卷机的心轴的插槽。
技术实现要素:
8.发明要解决的课题
9.鉴于上述的情况,本发明的至少一实施方式的目的在于,提供一种能够在短时间内更可靠地使钢带的前端进入收卷机的心轴的插槽的收卷设备以及收卷设备的运转方法。
10.用于解决课题的方案
11.本发明的至少一实施方式的收卷设备具备:
12.收卷机,其包括心轴,所述心轴具有能够收纳钢带的前端的插槽,且所述收卷机用于收卷所述钢带;
13.引导件,其配置于所述收卷机的上方,且用于将所述钢带向所述收卷机引导;以及
14.控制装置,其用于控制所述收卷机的旋转,
15.所述控制装置构成为:使所述收卷机向与收卷方向相反的方向旋转,以使得从所述引导件送出的所述钢带的前端进入所述插槽。
16.另外,在本发明的至少一实施方式的收卷设备的运转方法中,所述收卷设备包括:收卷机,其包括心轴,所述心轴具有能够收纳钢带的前端的插槽;以及引导件,其配置于所述收卷机的上方,其中,
17.所述收卷设备的运转方法包括如下步骤:
18.从所述引导件朝向所述收卷机送出所述钢带的前端;以及
19.使所述收卷机向与收卷方向相反的方向旋转,以使得从所述引导件送出的所述钢带的前端进入所述插槽。
20.发明效果
21.根据本发明的至少一实施方式,提供能够在短时间内更可靠地使钢带的前端进入收卷机的心轴的插槽的收卷设备以及收卷设备的运转方法。
附图说明
22.图1是应用一实施方式的收卷设备的轧制设备的概要结构图。
23.图2a是一实施方式的收卷机的局部剖视图。
24.图2b是一实施方式的收卷机的局部剖视图。
25.图3是一实施方式的控制装置的概要结构图。
26.图4是一实施方式的收卷设备的运转方法的流程图。
27.图5是用于说明一实施方式的收卷设备的运转方法的图。
28.图6是用于说明一实施方式的收卷设备的运转方法的图。
29.图7是用于说明一实施方式的收卷设备的运转方法的图。
30.图8是用于说明一实施方式的收卷设备的运转方法的图。
31.图9是用于说明一实施方式的收卷设备的运转方法的图。
32.图10是表示一实施方式的运转方法中的钢带的铅垂方向的位置的时间变化的一个例子的图。
33.图11是表示一实施方式的运转方法中的钢带的水平方向的位置的时间变化的一个例子的图。
34.图12是用于说明一实施方式的引导件的位置等的变更的图。
35.图13是一实施方式的引导件的位置等的变更的流程图。
36.图14是一实施方式的引导件的位置等的变更的流程图。
37.附图标记说明:
[0038]1ꢀꢀꢀ
轧制设备
[0039]2ꢀꢀꢀ
收卷设备
[0040]4ꢀꢀꢀ
放卷机
[0041]6ꢀꢀꢀ
送入侧导向辊
[0042]8ꢀꢀꢀ
收卷机
[0043]9ꢀꢀꢀ
马达
[0044]
10
ꢀꢀ
轧制机
[0045]
11
ꢀꢀ
马达
[0046]
12
ꢀꢀ
送出侧导向辊
[0047]
13
ꢀꢀ
引导件
[0048]
13a 引导面
[0049]
13b 前端
[0050]
14
ꢀꢀ
心轴
[0051]
14a 表面
[0052]
14b 最上部
[0053]
15
ꢀꢀ
轧制辊
[0054]
16
ꢀꢀ
轧制辊
[0055]
17
ꢀꢀ
中间辊
[0056]
18
ꢀꢀ
中间辊
[0057]
19
ꢀꢀ
支承辊
[0058]
20
ꢀꢀ
支承辊
[0059]
22
ꢀꢀ
插槽
[0060]
24
ꢀꢀ
夹持器
[0061]
32
ꢀꢀ
第一位置检测器
[0062]
34
ꢀꢀ
第二位置检测器
[0063]
38
ꢀꢀ
速度传感器
[0064]
40
ꢀꢀ
检测器
[0065]
50
ꢀꢀ
控制装置
[0066]
52
ꢀꢀ
接触判定部
[0067]
54
ꢀꢀ
进入插槽判定部
[0068]
56
ꢀꢀ
钢带位置范围判定部
[0069]
58
ꢀꢀ
表取得部
[0070]
60
ꢀꢀ
表修正部
[0071]
62
ꢀꢀ
收卷机控制部
[0072]
64
ꢀꢀ
夹持器控制部
[0073]
66
ꢀꢀ
送出控制部
[0074]
68
ꢀꢀ
引导件控制部
[0075]
70
ꢀꢀ
存储部
[0076]
s
ꢀꢀꢀ
钢带
[0077]
sa
ꢀꢀ
下游侧部位
[0078]
st
ꢀꢀ
前端。
具体实施方式
[0079]
以下,参照附图对本发明的几个实施方式进行说明。其中,作为实施方式而记载的或者附图所示的构成部件的尺寸、材质、形状、其相对配置等并不意在将本发明的范围限定于此,只不过是单纯的说明例。
[0080]
(轧制设备的结构)
[0081]
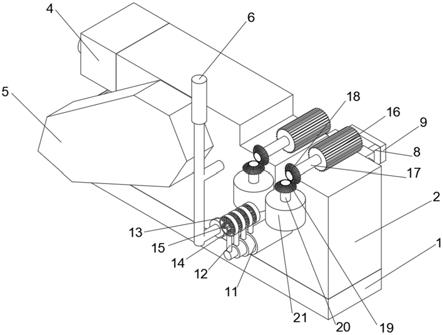
图1是应用一实施方式的收卷设备2的轧制设备的概要结构图。如图1所示,轧制设备1具备:轧制机10,其用于轧制钢带s;放卷机4,其设置于轧制机10的送入侧(即钢带s的搬运方向上的轧制机10的上游侧);以及收卷设备2,其包括设置于轧制机10的送出侧(即钢带s的搬运方向上的轧制机10的下游侧)的收卷机8。轧制设备1例如可以如图1所示包括1台轧制机10,或者也可以包括2台以上的轧制机10。
[0082]
轧制机10包括夹着钢带s而设置于钢带s的两面侧的一对轧制辊(工作辊)15、16。另外,轧制机10包括分别夹着一对轧制辊15、16而相对于钢带s分别设置于相反侧的一对中间辊17、18以及一对支承辊19、20。中间辊17、18以及支承辊19、20构成为支承轧制辊15、16。另外,轧制机10具备用于对一对轧制辊15、16施加负载而将一对轧制辊15、16之间的钢带s
压下的压下装置(液压缸等;未图示)。
[0083]
在轧制辊15、16经由主轴(未图示)等而连接有马达11,轧制辊15、16由马达驱动旋转。在钢带s的轧制时,一边由压下装置压下钢带s一边利用马达11使轧制辊15、16旋转,由此在轧制辊15、16与钢带s之间产生摩擦力,利用该摩擦力将钢带s向轧制辊15、16的送出侧输送。
[0084]
放卷机4的心轴构成为由马达(未图示)驱动而朝向轧制机10将钢带s放卷。需要说明的是,放卷机4的心轴在钢带s的轧制时由马达(未图示)驱动而对钢带s赋予送入侧张力。
[0085]
收卷机8构成为收卷来自轧制机10的钢带s。收卷机8构成为由马达9驱动而使心轴14旋转。收卷机8在钢带s的收卷时,心轴14向图1所示的收卷方向旋转而对钢带s进行收卷。需要说明的是,在一边利用收卷机8的心轴14对钢带s进行收卷一边进行轧制时,通过收卷机8的心轴14对钢带s赋予送出侧张力。
[0086]
如图1所示,也可以在放卷机4的心轴与轧制机10之间设置用于引导从放卷机4的心轴向轧制机10导入的钢带s的送入侧导向辊6。另外,在轧制机10与收卷机8的心轴14之间也可以设置用于引导从轧制机10向收卷机8的心轴14输送的钢带s的送出侧导向辊12。
[0087]
在几个实施方式中,轧制设备1也可以是使通过一对轧制辊15、16之间的钢带s往复而进行轧制的轧制设备(反向轧机)。在该情况下,在从放卷机4的心轴放卷的钢带s的紧接尾端之前停止轧制,在钢带s被轧制辊15、16压下的状态下,完成第奇数次(第1道次等)的轧制后,接下来,一边从收卷机8的心轴14朝向轧制机10将钢带s放卷,并且利用放卷机4的心轴将钢带s收卷,一边使钢带s向与之前相反的行进方向行进,进行第偶数次(第2道次等)的轧制。即,根据钢带s的行进方向,放卷机4的作用与收卷机8的作用交换。
[0088]
(收卷设备的结构)
[0089]
图1所示的收卷设备2包括:上述的收卷机8;引导件13,其配置于收卷机8的上方且用于将钢带s向收卷机8的心轴14引导;以及控制装置50,其用于控制收卷机8的心轴14的旋转等。另外,在收卷设备2设置有用于计测钢带s的位置、速度等的各种传感器。
[0090]
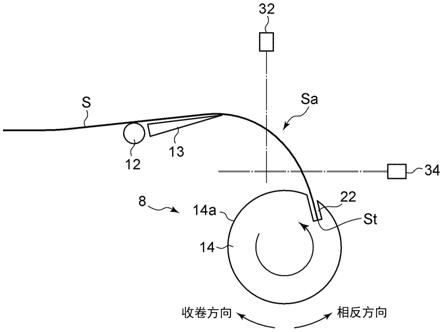
图2a以及图2b是一实施方式的收卷机8的局部剖视图,是用于说明收卷机8的动作的图。如图1以及图2a所示,收卷机8包括心轴14:其具有表面(外周面)14a;以及上述的马达9,其用于驱动心轴14旋转。收卷机8具有以从心轴14的表面14a凹陷的方式设置的插槽22。
[0091]
心轴14的插槽22构成为能够收纳钢带s的前端st(参照图2b)。例如,插槽22的宽度(槽的厚度)d设定为大于钢带s的厚度。另外,插槽22沿着相对于设置有该插槽22的位置处的心轴14的表面14a的切线t(参照图2a)的方向倾斜的方向(图2a的直线u的方向)延伸。
[0092]
另外,收卷机8具备用于把持进入插槽22的钢带s的前端部的夹持器24。在一实施方式中,夹持器24构成为由致动器(未图示)驱动而沿着径向移动。在向心轴14的插槽22收纳钢带s的前端st时,如图2a所示,将夹持器24维持在径向内侧的位置,成为插槽22开放的状态。另外,在把持进入到插槽22的钢带s的前端部时,如图2b所示,通过致动器,使夹持器24动作而移动到径向外侧的位置,并且对钢带s赋予从夹持器24朝向心轴14的力,由此把持钢带s的前端部。
[0093]
引导件13具有朝向上方的引导面13a。来自轧制机10的钢带s被引导件13的引导面13a引导,被导向收卷机8的心轴14。引导面13a典型地具有平面形状,但也可以部分地或整体地具有曲面形状。
[0094]
引导件13的位置也可以构成为能够变更。例如,也可以构成为:通过利用致动器(未图示)驱动引导件13,能够变更引导件13的水平方向上的位置和/或铅垂方向上的位置。
[0095]
或者,引导件13的取向也可以构成为能够变更。例如,通过利用致动器(未图示)驱动引导件13,能够变更引导面13a相对于水平方向的角度。
[0096]
或者,引导件13的形状也可以构成为能够变更。例如,引导件13也可以构成为:引导面13a能够伸缩,通过使用致动器(未图示)使引导面13a伸缩,能够变更引导面13a的长度、引导面13a的前端13b的位置。
[0097]
设置于收卷设备2的传感器也可以包括用于对钢带s中的、钢带s的搬运方向上的比引导件13靠下游侧的部位sa(以下,也简称为下游侧部位。)的位置进行计测的第一位置检测器32以及第二位置检测器34。
[0098]
图1所示的第一位置检测器32能够检测水平方向的特定的计测位置处的钢带s的铅垂方向的位置。第一位置检测器32也可以通过计测从该第一位置检测器32到钢带s的铅垂方向的距离lv(参照图5),来检测铅垂方向上的钢带s的位置(相对于第一位置检测器32的相对位置)。
[0099]
图1所示的第二位置检测器34能够检测铅垂方向的特定的计测位置处的钢带s的水平方向的位置。第二位置检测器34也可以通过计测从该第二位置检测器34到钢带s的水平方向的距离lh(参照图5),来检测水平方向上的钢带s的位置(相对于第二位置检测器34的相对位置)。
[0100]
另外,如图1所示,在收卷设备2,也可以设置用于对轧制机10的送出侧处的钢带s的速度进行计测的速度传感器38以及用于在轧制机10的送出侧处检测钢带s的前端st的通过的检测器40等。
[0101]
图3是构成一实施方式的收卷设备2的控制装置50的概要结构图。控制装置50构成为:从设置于收卷设备2的各种传感器(上述的第一位置检测器32或者第二位置检测器34等)接收表示检测结果的信号,并基于接收到的信号来控制收卷机8的心轴14的旋转。另外,控制装置50也可以构成为:基于从各种传感器接收到的信号,来控制夹持器24、引导件13、或者在钢带s的搬运方向上设置于收卷机8的上游侧的送出部(轧制机10等)。
[0102]
控制装置50也可以包括处理器(cpu等)、存储装置(存储器器件;ram等)、辅助存储部以及接口等。控制装置50经由接口而接收来自各种传感器的信号。处理器构成为对这样接收到的信号进行处理。另外,处理器构成为对在存储装置中展开的程序进行处理。
[0103]
控制装置50中的处理内容也可以作为由处理器执行的程序来安装,并存储于辅助存储部中。在程序执行时,这些程序在存储装置中展开。处理器从存储装置中读取程序,并执行程序中包含的命令。
[0104]
如图3所示,控制装置50包括:接触判定部52,其用于判定钢带s的前端部是否与收卷机8的心轴14的表面14a接触;进入插槽判定部54,其用于判定钢带s的前端st是否进入到心轴14的插槽22;以及收卷机控制部62,其用于控制收卷机8的动作。另外,控制装置50也可以包括用于控制夹持器24的动作的夹持器控制部64、用于控制送出部(轧制机10等)的动作的送出控制部66、和/或用于控制引导件13的动作的引导件控制部68。另外,控制装置50也可以包括钢带位置范围判定部56、表取得部58、和/或表修正部60。需要说明的是,关于构成控制装置50的各部分的功能在后叙述。
[0105]
(收卷设备的运转方法)
[0106]
接下来,对具有上述的结构的收卷设备2的运转方法进行说明。需要说明的是,在以下的说明中,对利用上述的控制装置50使收卷设备2运转的方法进行说明,在几个实施方式中,也可以手动进行以下说明的方法中的一部分或者全部。
[0107]
图4是一实施方式的收卷设备2的运转方法的流程图。图5~图9分别是用于说明一实施方式的收卷设备2的运转方法的图。需要说明的是,图5表示将钢带s朝向收卷机8送出的状态,图6表示钢带s的前端st与收卷机8的心轴14的表面14a接触的状态,图7以及图8表示钢带s的前端部进入到收卷机8的心轴14的插槽22的状态,图9表示利用收卷机8将钢带s收卷的状态。图10是表示一实施方式的运转方法中的钢带的铅垂方向的位置的时间变化的一个例子的图,图11是表示一实施方式的运转方法中的钢带的水平方向的位置的时间变化的一个例子的图。
[0108]
在一实施方式中,首先,通过送出部,将钢带s经由引导件13朝向收卷机8送出(s2;参照图5)。在步骤s2中,钢带s的前端st位于引导件13与收卷机8的心轴14之间。上述的送出部也可以是轧制机10或者放卷机4。例如,在用轧制机10的轧制钢带s时,轧制机10也可以作为送出部而发挥功能。或者,在钢带s的非轧制时,放卷机4也可以作为送出部而发挥功能。
[0109]
然后,通过收卷机控制部62,使收卷机8的心轴14向与收卷方向相反的方向(以下,也简称为相反方向。)旋转,以使得从引导件13送出的钢带s的前端st进入收卷机8的心轴14的插槽22(s8;参照图6~图8)。具体而言,例如,收卷机控制部62向马达9赋予适当的转速指令值,以使得收卷机8的心轴14向相反方向旋转。
[0110]
这样,通过使收卷机8的心轴14向与收卷方向相反的方向旋转,以使得由位于收卷机8的上方的引导件13引导的钢带s的前端st进入收卷机8的心轴14的插槽22,从而即使不精细地调整钢带s的前端st与插槽22的相对位置关系,由于插槽22朝向钢带s的前端st移动并收纳该前端st,因此也能够自动地使钢带s的前端st进入插槽22。因此,能够在短时间内更可靠地使钢带s的前端st进入收卷机8的心轴14的插槽22,由此能够提高产品的生产效率。
[0111]
在步骤s8中,也可以在钢带s的前端st与心轴14的表面14a接触的状态下(参照s4以及图6),使心轴14向相反方向旋转。另外,在步骤s8中,也可以在使由送出部(轧制机10等)进行的钢带s的送出停止后(s6),使心轴14向相反方向旋转。需要说明的是,在其他实施方式中,也可以在停止由送出部进行的钢带s的送出之前开始心轴14的相反方向的旋转。
[0112]
在一实施方式中,在步骤s6中,也可以基于钢带s的下游侧部位sa的位置,而停止由送出部进行的钢带s的送出。即,控制装置50例如也可以基于钢带s的下游侧部位sa的位置,对驱动作为送出部的轧制机10的马达11赋予用于停止轧制辊15、16的旋转的转速指令值。
[0113]
更具体而言,例如,在步骤s2中,一边将钢带s朝向收卷机8送出,一边利用接触判定部52(参照图3),基于钢带s的下游侧部位sa的位置来判定钢带s的前端st是否与心轴14的表面14a接触(s4)。而且,如果在步骤s4中判定为钢带s的前端st与心轴14的表面14a接触(在s4中为“是”),则停止由送出部进行的钢带s的送出(s6)。这里,钢带s的下游侧部位sa的位置也可以是由第一位置检测器32或者第二位置检测器34检测出的钢带s的位置。需要说明的是,如果在步骤s4中判定为钢带s的前端st尚未与心轴14的表面14a接触(在s4中为
“
否”),则返回步骤s2,继续钢带s的送出。
[0114]
钢带s的前端st是否与心轴14的表面14a接触,例如能够如以下那样进行判定。这里,图10以及图11分别表示第一位置检测器32以及第二位置检测器对钢带s的位置的检测结果。需要说明的是,在图10的曲线图中,表示出纵轴的值越大,则由第一位置检测器32检测出的钢带s的位置越位于上方(即,铅垂方向上的第一位置检测器32与钢带s的距离越短)。另外,在图11的曲线图中,表示出纵轴的值越大,则由第二位置检测器34检测出的钢带s的位置在水平方向上越靠近送出部(轧制机10等)(即,水平方向上的第二位置检测器34与钢带s的距离越大)。
[0115]
在利用送出部经由引导件13朝向收卷机8的心轴14送出钢带s时,钢带s的前端st在时刻t10(参照图10、图11)在水平方向上通过第一位置检测器32的位置,在时刻t11在铅垂方向上通过第二位置检测器34的位置,在时刻t12到达心轴14的表面14a。然后,在时刻t13以前的期间,伴随着由送出部进行的钢带s的送出,钢带s的前端st继续沿着心轴14的表面14a移动。此时,如图10所示,由第一位置检测器32检测出的钢带s的铅垂方向的位置与钢带s的前端st接触于表面14a之前(时刻t10~t12)相比,下降速度变小(其中,为钢带s的送出速度恒定的情况)。这样,能够基于钢带s的铅垂方向的位置的下降速度来判定为钢带s的前端st与心轴14的表面14a接触。
[0116]
这样,通过基于钢带s的下游侧部位sa的位置来停止钢带s的送出,从而能够在钢带s的前端st处于容易进入插槽22的适当位置时停止由送出部(轧制机10等)进行的钢带s的送出。由此,能够更可靠地使钢带s的前端st进入收卷机8的心轴14的插槽22。
[0117]
在步骤s8中,也可以基于钢带s的下游侧部位sa的位置来使收卷机8的心轴14的相反方向的旋转开始。即,也可以基于控制装置50钢带s的下游侧部位sa的位置,来赋予用于开始收卷机8的心轴14的旋转的转速指令值。
[0118]
这样,基于钢带s的下游侧部位sa的位置来使收卷机8的心轴14的相反方向的旋转开始,因此能够更可靠地使钢带s的前端st进入收卷机8的心轴14的插槽22。
[0119]
在一实施方式中,通过接触判定部52,基于钢带s的下游侧部位sa的位置来进行钢带s的前端st是否与收卷机8的心轴14的表面14a接触的判定(上述的s4)。而且,如果判定为钢带s的前端st与收卷机8的心轴14的表面14a接触(在s4中为“是”),则使收卷机8的心轴14的相反方向的旋转开始(s8)。需要说明的是,由接触判定部52进行的钢带s的前端st是否与心轴14的表面14a接触的判定能够按照已经说明的次序进行。
[0120]
这样,基于钢带s的前端st是否与收卷机8的心轴14的表面14a接触的判定结果来使收卷机8的心轴14的相反方向的旋转开始,因此能够更可靠地使钢带s的前端st进入收卷机8的心轴14的插槽22。
[0121]
或者,在一实施方式中,例如,控制装置50判定钢带s的前端st是否为与收卷机8的心轴14的上侧的表面14a(心轴14上半部的表面14a)中的、比最上部14b(参照图6)靠收卷方向下游侧的部分(在图6中,为心轴14中的带有斜线的部分的表面14a)接触的状态。而且,也可以在钢带s的前端st与该部分相接的状态下,使收卷机8的心轴14向相反方向旋转(s8)。
[0122]
这样,通过在钢带s的前端st与收卷机8的心轴14的上侧的表面14a中的、比最上部14b靠收卷方向下游侧的部分相接的状态下,使收卷机8的心轴14向相反方向旋转,能够更可靠地使钢带s的前端st进入收卷机8的插槽22。
[0123]
如果按照到目前为止说明的步骤s8以前的次序使收卷机8的心轴14向相反方向旋转,则进行钢带s的前端st是否进入到收卷机8的心轴14的插槽22的判定(s10)。在步骤s10中,继续收卷机8的心轴14的相反方向的旋转(s8),直至判定为钢带s的前端st进入到收卷机8的心轴14的插槽22(在步骤s10中为“否”)。
[0124]
如果在步骤s10中判定为钢带s的前端st进入到收卷机8的心轴14的插槽22(在步骤s10中为“是”;参照图8),则使收卷机8的心轴14的相反方向的旋转停止(s12)。另外,如果在步骤s10中判定为钢带s的前端st进入到收卷机8的心轴14的插槽22(在步骤s10中为“是”;参照图8),则利用夹持器24(参照图2a、2b)把持进入到插槽22的钢带s的前端部(s14)。在步骤s14中,通过夹持器控制部64(参照图3),适当地控制用于驱动夹持器24的致动器,以使得由夹持器24把持钢带s的前端部。需要说明的是,步骤s12和s14的顺序哪个在先都可以。即,也可以在由夹持器24把持进入到插槽22的钢带s的前端部后,使收卷机8的心轴14的相反方向的旋转停止。
[0125]
然后,在由夹持器24把持钢带s的前端部的状态下,使收卷机8的心轴14向收卷方向旋转,对钢带s进行收卷(s16;参照图9)。
[0126]
需要说明的是,从将钢带s朝向收卷机8的心轴14送出的步骤s2到至少钢带s的前端st进入插槽22(到步骤s12)为止,设定引导件13的位置、取向以及形状,以使得利用引导件13将钢带s导向收卷机8的心轴14。另一方面,在用收卷机8收卷由夹持器24把持的钢带s的阶段(s16,参照图9),不需要用引导件13将钢带s导向收卷机8的心轴14。因此,在该阶段,例如也可以如图9所示,设定引导件13的位置、取向以及形状以使得引导件13的引导面13a从钢带s分离。
[0127]
在步骤s10中,也可以通过进入插槽判定部54(参照图3),基于钢带s的下游侧部位sa的位置而进行钢带s的前端st是否进入到收卷机8的心轴14的插槽22的判定。钢带s的下游侧部位sa的位置也可以是由第一位置检测器32或者第二位置检测器34检测出的钢带s的位置。在该情况下,能够基于钢带s的下游侧部位sa的位置来检测钢带s的前端st进入到心轴14的插槽22的情况,因此基于该检测结果,能够在钢带s的前端st进入到插槽22的状态下适当地停止收卷机8的心轴14的相反方向的旋转。由此,在构造的步骤s16中,能够容易地用收卷机8的夹持器24适当地把持钢带s的前端部。
[0128]
在步骤s10中,钢带s的前端st是否进入到收卷机8的心轴14的插槽22,例如也可以如下那样判定。
[0129]
在一实施方式中,进入插槽判定部54在收卷机8的心轴14的相反方向的旋转中,如果检测出钢带s的下游侧部位sa的位置上升,则判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0130]
如图10所示,在步骤s8中,开始收卷机8的心轴14的相反方向的旋转(图10的时刻t14),在经过一段时间的时刻t15,钢带s的下游侧部位sa的铅垂方向的位置(由第一位置检测器32检测出的位置)向下方下降。这是表示在时刻t15钢带s的前端st进入到插槽22的情况(图7所示的状态)。然后,当继续收卷机8的心轴14的向相反方向旋转时,伴随着收卷机8的心轴14向相反方向的旋转,钢带s的下游侧部位sa被向上方推起,其结果是在时刻t16钢带s的下游侧部位sa的铅垂方向的位置上升(图8所示的状态)。像这样钢带s的下游侧部位sa被向上方推起是因为:钢带s的前端st进入插槽22,由此钢带s的前端部从插槽22的底面
受力而移动。因此,在收卷机8的心轴14的相反方向的旋转中,通过钢带s的下游侧部位sa的位置上升,能够判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0131]
在一实施方式中,进入插槽判定部54也可以在收卷机8的心轴14的相反方向的旋转中,钢带s的下游侧部位sa的位置从下降变化为上升时,判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0132]
从图10的曲线图可知,从在步骤s2中开始钢带s的送出起(即时刻t10起),到在时刻t16钢带s的下游侧部位sa的位置上升为止,钢带s的下游侧部位sa的位置断续地下降,不大幅上升。由此,通过钢带s的下游侧部位sa的位置从下降变化为上升,能够判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0133]
另外,在一实施方式中,进入插槽判定部54在收卷机8的心轴14的相反方向的旋转中,如果检测出钢带s的下游侧部位sa的位置后退,则判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0134]
如图11所示,在步骤s8中,开始收卷机8的心轴14的相反方向的旋转(图11的时刻t14),在经过一段时间的时刻t15,钢带s的下游侧部位sa的水平方向的位置(由第二位置检测器34检测的位置)后退。这是表示在时刻t15钢带s的前端st进入到心轴14的插槽22的情况(图7所示的状态)。然后,当继续收卷机8的向相反方向的旋转时,伴随着收卷机8的心轴14向相反方向的旋转,从时刻t15到t16,钢带s的下游侧部位sa的水平方向的位置逐渐继续后退(图8所示的状态)。像这样钢带s的下游侧部位sa的位置后退是因为:钢带s的前端st进入到插槽22,由此钢带s的前端部从插槽22的底面受力而移动。需要说明的是,水平方向的位置后退是指在水平方向上以从收卷机8的心轴14靠近送出部(轧制机10等;位于比收卷机8的心轴14靠钢带s的搬运方向的上游侧的装置)的方式移动位置。
[0135]
因此,在收卷机8的心轴14的相反方向的旋转中,通过钢带s的下游侧部位sa的位置后退,能够判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0136]
在一实施方式中,进入插槽判定部54也可以在收卷机8的心轴14的相反方向的旋转中,钢带s的下游侧部位sa的位置从前进变化为后退时,判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0137]
从图11的曲线图可知,从步骤s2中开始钢带s的送出起(即从时刻t10起),直到在时刻t15钢带s的下游侧部位sa的位置开始后退为止,钢带s的下游侧部位sa的位置断续地前进,不大幅后退。由此,通过钢带s的下游侧部位sa的位置从前进变化为后退,能够判定为钢带s的前端st进入到收卷机8的心轴14的插槽22。
[0138]
图12是用于说明一实施方式的引导件13的位置等的变更的图。图13以及图14分别是一实施方式的引导件13的位置等的变更的流程图。
[0139]
在几个实施方式中,通过控制装置50,基于钢带s中的下游侧部位sa的位置,能够变更引导件13的位置、取向以及形状中的至少一个。需要说明的是,在图11中,示出了能够变更引导件13的取向、即引导面13a相对于水平方向的角度θ。
[0140]
如图12所示,通过变更引导件13的位置等(在图12中为引导件13的取向),从而变更钢带s的下游侧部位sa的位置、形状。因此,通过基于钢带s的下游侧部位sa的位置适当地变更引导件13的位置、取向以及形状中的至少一个,能够调节钢带s的前端部的位置、形状,以使得钢带s的前端st容易进入心轴14的插槽22。例如,通过引导件13的位置等的调节,只
要能够使朝向收卷机8的心轴14送出的钢带s的前端st接近收卷机8的心轴14的表面14a中的特定的位置(例如,心轴14的上侧的表面14a中的、比最上部14b靠收卷方向下游侧的部分),则在上述的步骤s8中使收卷机8的心轴14向相反方向旋转时,钢带s的前端st容易进入收卷机8的心轴14的插槽22。因此,根据上述的实施方式,通过适当地变更引导件13的位置等,能够更可靠地使钢带s的前端st进入收卷机8的心轴14的插槽。
[0141]
在一实施方式中,控制装置50构成为:通过基于钢带s中的下游侧部位sa的位置进行的反馈控制,来变更引导件13的位置、取向以及形状中的至少一个,以使得钢带s中的下游侧部位sa通过水平方向以及铅垂方向上的一个以上的规定区域。
[0142]
更具体而言,例如,如图13的流程图所示,首先,一边利用送出部将钢带s经由引导件13朝向收卷机8的心轴14送出(s102;与图4的s2相当),一边利用第一位置检测器32(和/或第二位置检测器34)检测钢带s的下游侧部位sa的位置(s104)。在步骤s104中检测出的钢带s的下游侧部位sa的位置在规定范围rv(和/或rh)内的情况下,在该状态下继续钢带s的送出(s102)。另一方面,在步骤s104中检测出的钢带s的下游侧部位sa的位置在规定范围rv(或者rh)外的情况下,适当地变更引导件13的位置等(这里,为引导面13a相对于水平方向的角度(引导角度))(s108),然后送出钢带s。而且,反复进行步骤s102~s108的次序,直到钢带s的前端st与收卷机8的心轴14的表面14a接触为止,或者,直到钢带s的前端st与收卷机8的心轴14的表面14a的距离成为既定的长度为止。这样,能够使钢带s的下游侧部位sa通过水平方向以及铅垂方向上的一个以上的规定区域(上述的rv和/或rh)。
[0143]
需要说明的是,上述的规定区域(例如rv或rh)也可以根据钢带s的钢种、厚度等而决定。
[0144]
根据上述的实施方式,变更引导件13的位置、取向以及形状中的至少一个,以使得钢带s的下游侧部位sa通过水平方向以及铅垂方向上的一个以上的规定区域(例如rv或rh)。由此,能够调节钢带s的前端部的位置、形状,以使得钢带s的前端st容易进入心轴14的插槽22。由此,能够更可靠地使钢带的前端st进入收卷机8的心轴14的插槽22。
[0145]
在一实施方式中,控制装置50构成为:基于表示钢带s的硬度或厚度与引导件13的前端13b的位置之间的对应关系的表,来设定引导件13的位置、取向以及形状中的至少一个,并且基于钢带s的下游侧部位sa的位置,来修正表。
[0146]
更具体而言,参照图14进行说明。以下在实施例中,表示钢带s的硬度或厚度与引导件13的前端13b的位置以及钢带s的送出量(距既定位置的长度)之间的对应关系的表存储于存储部70(参照图3)。存储部70也可以是硬盘、ssd等存储装置。
[0147]
在该实施方式中,在开始钢带s向收卷机8的心轴14的送出(与图4的s2对应)之前,控制装置50的表取得部58从存储于存储部70的表中,读取与收卷对象的钢带s的硬度以及钢带的硬度和/或厚度对应的引导件13的前端13b的位置以及钢带s距规定位置的送出量(s202)。需要说明的是,这里,上述的规定位置也可以是用于在轧制机10的送出侧处检测钢带s的前端st的通过的检测器40的位置。
[0148]
而且,引导件控制部68将引导件13的位置等(这里,为引导面13a相对于水平方向的角度(引导角度))设定为从表中读取的引导件13的前端13b的位置(s202)。另外,送出控制部66利用送出部将钢带s朝向收卷机8的心轴14送出从表读取的送出量的量并停止(s204)。这里,由送出部产生的钢带s的送出量能够通过从钢带s的前端st被检测器40检测
出的时刻起的由速度传感器38检测出的轧制机10送出侧的钢带s的速度的时间积分来求出。
[0149]
接下来,在步骤s204中停止钢带s的送出的状态下,使用第一位置检测器32(和/或第二位置检测器34),来检测钢带s的下游侧部位sa的位置。在这样检测出的下游侧部位sa的位置为基于从表中读取的引导件13的前端13b的位置的规定范围内的情况下(在s206中为“是”),进一步送出钢带s,按照已经叙述的次序进行钢带s的收卷(s212;与图4的s2~s16相当)。
[0150]
另一方面,在如上述那样检测出的下游侧部位sa的位置为基于从表中读取的引导件13的前端13b的位置的规定范围外的情况下(s206中为“否”),手动变更引导件13的位置等(这里,为引导面13a相对于水平方向的角度(引导角度))(s208),并且通过控制装置50的表修正部60,将存储于存储部70的表中的引导件13的前端13b的位置改写为在步骤s208中变更后的值(s210),以使得下游侧部位sa的位置为该规定范围内。而且,进一步送出钢带s,按照已经叙述的次序进行钢带s的收卷(s212;与图4的s2~s16相当)。在该情况下,在下次以后的钢带s的收卷中,基于修正后的表来设定引导件13的位置等。
[0151]
根据上述的实施方式,基于表示钢带s的硬度或厚度与引导件13的前端13b的位置之间的对应关系的表,来设定引导件13的位置、取向以及形状中的至少一个,并且基于钢带s的下游侧部位sa的位置来修正表。因此,通过基于这样修正的表设定引导件13的位置、取向或者形状,能够调节钢带s的前端部的位置、形状以使得钢带s的前端st容易进入心轴14的插槽22。由此,能够更可靠地使钢带s的前端st进入收卷机8的心轴14的插槽22。
[0152]
以下,对几个实施方式的收卷设备以及收卷设备的运转方法记载概要。
[0153]
(1)本发明的至少一实施方式的收卷设备(2)具备:
[0154]
收卷机(8),其具有心轴(14),所述心轴包括能够收纳钢带(s)的前端(st)的插槽(22),且所述收卷机用于收卷所述钢带;
[0155]
引导件(13),其配置于所述收卷机的上方,且用于将所述钢带向所述收卷机引导;以及
[0156]
控制装置(50),其用于控制所述收卷机的旋转,
[0157]
所述控制装置构成为:使所述收卷机向与收卷方向相反的方向旋转,以使得从所述引导件送出的所述钢带的前端进入所述插槽。
[0158]
根据上述(1)的结构,使收卷机向与收卷方向相反的方向旋转,以使得由位于收卷机的上方的引导件引导的钢带的前端进入收卷机的心轴的插槽,因此即使不精细地调整钢带的前端与插槽的相对位置关系,也能够使钢带的前端自动地进入插槽。因此,能够在短时间内更可靠地使钢带的前端进入收卷机的心轴的插槽,由此能够提高产品的生产效率。
[0159]
(2)在几个实施方式中,在上述(1)的结构中,
[0160]
所述控制装置构成为:基于所述钢带中的该钢带的搬运方向上的所述引导件的下游侧的部位(sa)的位置,来开始所述收卷机的所述相反方向的旋转。
[0161]
根据上述(2)的结构,基于钢带中的搬运方向上的引导件的下游侧的部位的位置来开始收卷机的相反方向的旋转,因此能够更可靠地使钢带的前端进入收卷机的心轴14的插槽。
[0162]
(3)在几个实施方式中,在上述(2)的结构中,
[0163]
所述控制装置构成为:基于所述钢带的所述下游侧的部位的位置,来进行所述钢带的前端是否与所述收卷机的所述心轴(14)的表面(14a)接触的判定,并基于该判定的结果,来开始所述收卷机的所述相反方向的旋转。
[0164]
根据上述(3)的结构,基于钢带的前端是否与收卷机的心轴的表面接触的判定结果,来开始收卷机的相反方向的旋转,因此能够更可靠地使钢带的前端进入收卷机的心轴的插槽。
[0165]
(4)在几个实施方式中,在上述(1)至(3)中的任一个结构中,
[0166]
所述控制装置构成为:在所述钢带的前端与所述收卷机的所述心轴的上侧表面中的比最上部(14b)靠收卷方向下游侧的部分相接的状态下,使所述收卷机向所述相反方向旋转。
[0167]
根据上述(4)的结构,在钢带的前端与所述收卷机的心轴的上侧表面中的比最上部靠收卷方向下游侧的部分相接的状态下,使收卷机向相反方向旋转,因此能够更可靠地使钢带的前端进入收卷机的心轴的插槽。
[0168]
(5)在几个实施方式中,在上述(1)至(4)中的任一个结构中,
[0169]
所述收卷设备具备送出部(例如上述的轧制机10或者放卷机4),所述送出部设置于所述钢带的搬运方向上的所述引导件的上游侧且用于将所述钢带朝向所述收卷机送出,
[0170]
所述控制装置构成为:基于所述钢带中的该钢带的搬运方向上的所述引导件的下游侧的部位的位置来停止由所述送出部进行的所述钢带的送出,并且在停止了所述钢带的送出的状态下使所述收卷机向所述相反方向旋转。
[0171]
根据上述(5)的结构,基于钢带中的引导件的下游侧的部位的位置来停止钢带的送出,因此通过在钢带前端处于容易进入插槽的适当的位置时使钢带的送出停止,能够更可靠地使钢带的前端进入收卷机的心轴的插槽。
[0172]
(6)在几个实施方式中,在上述(1)至(5)中的任一个结构中,
[0173]
所述控制装置构成为:基于所述钢带中的该钢带的搬运方向上的所述引导件的下游侧的部位的位置,来停止所述收卷机的所述相反方向的旋转。
[0174]
根据上述(6)的结构,能够基于钢带中的引导件的下游侧的部位的位置,而在钢带的前端进入到插槽的状态下适当地停止收卷机的相反方向的旋转。由此,能够容易地用收卷机的夹持器适当地把持钢带的前端部。
[0175]
(7)在几个实施方式中,在上述(6)的结构中,
[0176]
所述控制装置构成为:在所述收卷机的所述相反方向的旋转中,如果检测出所述钢带的所述部位的位置上升,则停止所述收卷机的所述相反方向的旋转。
[0177]
根据上述(7)的结构,在收卷机的相反方向的旋转中,能够基于钢带中的引导件的下游侧的部位的位置上升,而检测出钢带的前端进入到心轴的插槽。由此,基于该检测结果,能够在钢带的前端进入到心轴的插槽的状态下停止收卷机的相反方向的旋转。由此,能够利用收卷机的夹持器更可靠地把持钢带的前端部。
[0178]
(8)在几个实施方式中,在上述(6)的结构中,
[0179]
所述控制装置构成为:在所述收卷机的所述相反方向的旋转中,如果检测出所述钢带的所述部位的位置后退,则停止所述收卷机的所述相反方向的旋转。
[0180]
根据上述(8)的结构,在收卷机的相反方向的旋转中,能够基于钢带中的引导件的
下游侧的部位的位置后退,而检测出钢带的前端进入到心轴的插槽。由此,基于该检测结果,能够在钢带的前端进入到心轴的插槽的状态下停止收卷机的相反方向的旋转。由此,能够利用收卷机的夹持器更可靠地把持钢带的前端部。
[0181]
(9)在几个实施方式中,上述(1)至(8)中的任一个结构中,
[0182]
所述控制装置构成为:基于所述钢带中的该钢带的搬运方向上的所述引导件的下游侧的部位的位置,来变更所述引导件的位置、取向以及形状中的至少一个。
[0183]
根据上述(9)的结构,基于钢带中的引导件的下游侧的部位的位置,来变更引导件的位置、取向以及形状中的至少一个,由此,能够调节钢带的前端部的位置、形状以使得钢带的前端容易进入插槽。由此,能够更可靠地使钢带的前端进入收卷机的心轴的插槽。
[0184]
(10)在几个实施方式中,在上述(9)的结构中,
[0185]
所述控制装置构成为:变更所述引导件的位置、取向以及形状中的至少一个,以使得所述钢带中的该钢带的搬运方向上的所述引导件的下游侧的部位通过水平方向以及铅垂方向上的一个以上的规定区域。
[0186]
根据上述(10)的结构,变更引导件的位置、取向以及形状中的至少一个,以使得钢带中的引导件的下游侧的部位通过水平方向以及铅垂方向上的一个以上的规定区域,由此,能够调节钢带的前端部的位置、形状以使得钢带的前端容易进入插槽。由此,能够更可靠地使钢带的前端进入收卷机的心轴的插槽。
[0187]
(11)在几个实施方式中,在上述(9)的结构中,
[0188]
所述控制装置构成为:
[0189]
基于表示所述钢带的硬度或厚度与所述引导件的前端的位置之间的对应关系的表,来设定所述引导件的位置、取向以及形状中的至少一个,并且
[0190]
基于所述钢带的所述部位的位置,来修正所述表。
[0191]
根据上述(11)的结构,基于表示钢带的硬度或厚度与引导件的前端的位置之间的对应关系的表来设定引导件的位置、取向以及形状中的至少一个,并且基于钢带中的引导件的下游侧的部位的位置来修正所述表。因此,通过基于这样修正的表来设定引导件的位置、取向或者形状,能够调节钢带的前端部的位置、形状以使得钢带的前端容易进入心轴的插槽。由此,能够更可靠地使钢带的前端进入收卷机的心轴的插槽。
[0192]
(12)在几个实施方式中,在上述(1)至(11)中的任一个结构中,
[0193]
所述收卷设备具备夹持器(24),所述夹持器用于把持进入到所述插槽的所述钢带的前端部,
[0194]
所述控制装置构成为:如果通过所述收卷机向所述相反方向旋转而使所述钢带的前端部进入到所述插槽,则使所述夹持器动作以把持所述钢带的前端部。
[0195]
根据上述(12)的结构,利用夹持器把持通过使收卷机向相反方向旋转而进入到收卷机的心轴的插槽的钢带的前端部,因此通过在该状态下使收卷机向收卷方向旋转,能够适当地收卷钢带。
[0196]
(13)在几个实施方式中,在上述(1)至(12)中的任一个结构中,
[0197]
所述收卷设备具备位置检测器(例如上述的第一位置检测器或者第二位置检测器),所述位置检测器构成为对从所述引导件送出的所述钢带中的该钢带的搬运方向上的所述引导件的下游侧的部位的水平方向或者铅垂方向的位置进行检测,
[0198]
所述控制装置构成为:基于所述位置检测器的检测结果,来控制所述收卷机的旋转。
[0199]
根据上述(13)的结构,基于位置检测器的检测结果,来控制收卷机的旋转,因此通过基于该检测结果使收卷机向相反方向旋转,能够使钢带的前端自动地进入心轴的插槽。因此,能够在短时间内更可靠地使钢带的前端进入收卷机的心轴的插槽。
[0200]
(14)在本发明的至少一实施方式的收卷设备的运转方法中,所述收卷设备包括:收卷机,其包括心轴(14),所述心轴具有能够收纳钢带的前端的插槽;以及引导件,其配置于所述收卷机的上方,其中,
[0201]
所述收卷设备的运转方法包括如下步骤:
[0202]
从所述引导件朝向所述收卷机送出所述钢带的前端(s2);以及
[0203]
使所述收卷机向与收卷方向相反的方向旋转,以使得从所述引导件送出的所述钢带的前端进入所述插槽(s8)。
[0204]
根据上述(14)的方法,使收卷机向与收卷方向相反的方向旋转,以使得由位于收卷机的上方的引导件引导的钢带的前端进入收卷机的心轴的插槽,因此即使不精细地调整钢带的前端与插槽的相对位置关系,也能够使钢带的前端自动地进入心轴的插槽。因此,能够在短时间内更可靠地使钢带的前端进入收卷机的心轴的插槽,由此能够提高产品的生产效率。
[0205]
(15)在几个实施方式中,在上述(14)的方法中,
[0206]
所述收卷设备的运转方法还包括如下步骤:
[0207]
检测所述钢带中的该钢带的搬运方向上的所述引导件的下游侧的部位的位置(例如上述的s10):以及
[0208]
基于检测出的所述位置,而停止所述收卷机的所述相反方向的旋转(s12)。
[0209]
根据上述(15)的方法,基于钢带中的引导件的下游侧的部位的位置,能够在钢带的前端进入到心轴的插槽的状态下适当地停止收卷机的相反方向的旋转。由此,能够容易地利用收卷机的夹持器适当地把持钢带的前端部。
[0210]
以上,对本发明的实施方式进行了说明,但本发明并不限定于上述的实施方式,还包括对上述的实施方式施加了变形的方式、将这些方式适当组合而得到的方式。
[0211]
在本说明书中,“在某方向上”、“沿着某方向”、“平行”、“正交”、“中心”、“同心”或者“同轴”等表示相对的或绝对的配置的表达不仅表示严格上那样的配置,还表示具有公差或者能够得到相同功能的程度的角度、距离而相对地位移了的状态。
[0212]
例如,“相同”、“相等”以及“均质”等表示事物相等的状态的表达不仅表示严格相等的状态,还表示存在公差、或者能够得到相同功能的程度的差的状态。
[0213]
另外,在本说明书中,四边形状、圆筒形状等表示形状的表达不仅表示几何学上严格意义下的四边形状、圆筒形状等形状,还表示在能够得到相同效果的范围内包括凹凸部、倒角部等的形状。
[0214]
另外,在本说明书中,“具备”、“包括”或者“具有”一构成要素这样的表达不是将其他构成要素的存在排除在外的排他性表达。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。