1.本发明涉及一种仿人手气动软体灵巧手,属于软体机器人技术领域。
背景技术:
2.软体机器人近年来迅速发展,各种类型的软体机器人及相关技术层出不穷,成为机器人领域一个极具前景的研究方向。
3.软体机器人主要采用柔性材料制作,常采用气\液压、肌腱拉索、形状记忆合金、电致动聚合物等驱动方式进行驱动,能够在复杂的、充满障碍物的工作环境中,利用其柔性结构和无限的自由度来完成工作任务,具有极强的环境适应性和运动灵活性,在探测、医疗、军事、工业等领域均具有广泛的应用前景。
4.常见的软体机器人的主要应用形式包括爬行机器人、软体机械臂、软体手等,软体手是其中一个热门的应用形式。软体手在抓取和操作异形物体、易损物体以及软物体时,拥有先天优势,一般采用肌腱驱动和气动驱动,近年来最新的研究大多采用气动驱动,相比于肌腱驱动,气动驱动的动力系统更为简单、机器人本体更为柔软并且还可以使用气压对软体机器人的刚度等特性进行控制。
5.气动软体手由硅胶之类的柔性材料制成,一个气路负责一部分软体气腔的动作。常见的软体手,由于设计时的集成型欠佳,为保证外观简洁、密封性优良,只能选择一个手指由一个软体气腔构成,手指各区段变形不独立,导致单指工作空间较小,进而使软体手的工作空间较小。
技术实现要素:
6.为解决背景技术中存在的问题,本发明提供一种仿人手气动软体灵巧手。
7.实现上述目的,本发明采取下述技术方案:一种仿人手气动软体灵巧手,包括拇指基部关节、手指安装架、多根手指以及腕部法兰;所述多根手指至少包括拇指、食指、中指以及无名指,所述拇指的根部通过拇指基部关节与手指安装架连接,除拇指外的其他手指的根部与手指安装架连接,所述手指安装架设置在腕部法兰上;每根所述手指上均设有多个气室以及多条关节充气流道,所述多条关节充气流道出气端与多个气室一一对应连通设置。
8.与现有技术相比,本发明的有益效果是:
9.1、本发明采用多关节软体手指,从而使单个手指的自由度得到提高,每个气室独立通气使用,每个手指拥有三个气室,每个气室能够独立弯曲实现关节作用,进而增加了软体手的工作空间,且在同级别运动速度和负载情况下,所需耗气量更低;
10.2、本发明设置了拉力柱,使得手指在伸直过程中,气室收缩的弹力能够用于驱动手指过渡段的运动和负载,从而提高了手指的反向作用力和作用速度;
11.3、本发明气室外壁设置了气室外壁约束层,从而限制了气室的侧向无效膨胀,减少了气室的耗气量,提高了气室的双向运动速度,以补偿拉力柱引起的正向弯曲速度降低;
12.4、本发明每根手指的指根均设有摆动关节,并利用平行四边形四连杆机构将摆动传递至手指,尽可能贴近人类手指功能;
13.5、本发明将关节充气流道预制在弯曲梁内,紧凑布置气路,提高集成性,避免在气室外部铺设管路连接气源,显得杂乱。
附图说明
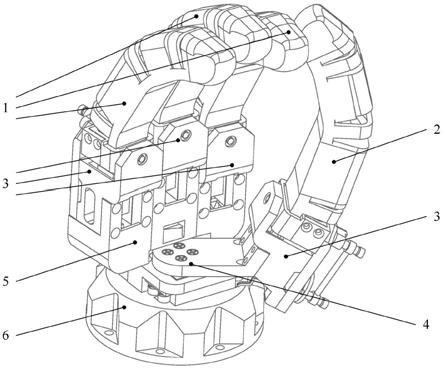
14.图1是本发明的结构示意图;
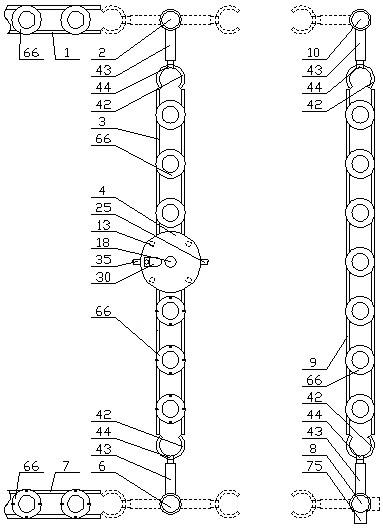
15.图2是手指的结构示意图;
16.图3是手指的剖视图;
17.图4是图3的仰视图;
18.图5是充气式软体关节的结构示意图;
19.图6是摆动关节与手指安装架的连接关系示意图;
20.图7是摆动关节的结构示意图;
21.图8是摆动关节工作原理示意图。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.一种仿人手气动软体灵巧手,包括拇指基部关节4、手指安装架5、多根手指1以及腕部法兰6;所述多根手指1均为多关节的软体手指,且至少包括拇指2、食指、中指以及无名指,以提高元件的互换性;所述拇指2的根部通过拇指基部关节4与手指安装架5连接,除拇指2外的其他手指1的根部与手指安装架5连接,所述手指安装架5设置在腕部法兰6上,腕部法兰6则用于进一步与其他设备相连接;每根所述手指1上均设有多个气室以及多条关节充气流道,所述多条关节充气流道通过外部气源供气,并出气端与多个气室一一对应连通设置,关节充气流道用于分别向对应的气室输送压力气体。
24.每根所述手指1还包括指尖13、弯曲梁和流道组件14以及多个支撑;所述指尖13为硅胶材质,指尖13和多个支撑与多个气室由手指1的指尖至指根一一交替连接设置,并指尖13、多个支撑以及多个气室均设置在弯曲梁和流道组件14上,所述多条关节充气流道均设置在弯曲梁和流道组件14内。
25.所述多个支撑分别为手指根部支撑10、手指中后部支撑11以及手指中前部支撑12;所述手指根部支撑10与对应的摆动关节3的手指连接架31通过粘接剂连接;
26.所述多个气室分别为指根部气室7、指中部气室8以及指尖部气室9;
27.所述多条关节充气流道分别为指中关节充气流道16、指根关节充气流道19以及指尖关节充气流道20;
28.所述指根关节充气流道19的出气端与指根部气室7连通设置,所述指中关节充气流道16的出气端与指中部气室8连通设置,所述指尖关节充气流道20的出气端与指尖部气室9连通设置。
29.所述指尖13以及每个支撑均包括拉力柱17以及硬质胶体填充物41,所述拉力柱17的端部分别与对应的气室连接,拉力柱17的下端与弯曲梁和流道组件14连接,所述硬质胶体填充物41包裹在拉力柱17的外侧。
30.拉力柱17由铂金硅胶混杂散碎芳纶纤维制成,弹性很差,能够在手指1受力量级内传递力的同时而不发生明显的伸长变形,拉力柱17用于将气室的回弹力作用于指尖13以及对应的支撑(手指中后部支撑11以及手指中前部支撑12),从而提高了手指1伸直运动时的动作速度和负载能力。
31.硬质胶体填充物为不低于邵氏硬度40度的胶体填充物。不低于邵氏硬度40度的胶体填充物由于硬度较高,一方面可用于固定拉力柱17,使其能够正常工作,另一方面其受到气室充气后的对外作用力时,将发生宏观位移而不是发生柔性变形,这将增大手指1的弯曲角度。
32.所述弯曲梁和流道组件14还包括纤维约束层15以及弯曲梁18;所述弯曲梁18内设有多条关节充气流道,并弯曲梁18的上端与拉力柱17的下端连接,弯曲梁18的下端设有纤维约束层15。
33.纤维约束层15由包括芳纶但不局限于芳纶的高强度纤维织物构成,用于限制气体向弯曲梁18底部的膨胀以及限制弯曲梁18的伸长。
34.每个所述气室均包括气室外壁23、气室外壁约束层25以及膨胀壁26;所述气室外壁23为环状结构,气室外壁23设有与对应的关节充气流道连通的进气孔,且气室外壁23的两端部分别与对应膨胀壁26连通设置,气室外壁23以及两侧的膨胀壁26封闭围合成膨胀气室,所述膨胀壁26与指尖13的拉力柱17或对应的支撑的拉力柱17粘接。气室外壁23沿其周向内嵌有气室外壁约束层25,气室外壁约束层25由包括芳纶但不局限于芳纶的高强度纤维织物构成。
35.指根部气室7、手指根部支撑10、手指中后部支撑11、指根关节充气流道19以及对应段的弯曲梁18和纤维约束层15组成了指根部软体关节38;
36.指中部气室8、手指中后部支撑11、手指中前部支撑12、指中关节充气流道16以及对应段的弯曲梁18和纤维约束层15组成了指中部软体关节39;
37.指尖部气室9、手指中前部支撑12、指尖13、指尖关节充气流道20以及对应段弯曲梁18和纤维约束层15组成了指尖部软体关节40。
38.在每根手指1中,均包含了三个充气式软体关节,分别是上述的指根部软体关节38、指中部软体关节39以及指尖部软体关节40,三个软体关节在压力作用下,其对应的气室发生膨胀变形,从而推动对应的支撑运动,由于支撑固定于弯曲梁上且刚度较大,当其被推动运动时,只能导致弯曲梁发生弯曲从而在两个支撑之间形成夹角,当压力不同时,膨胀程度也不同,从而导致不同的夹角。如此设计,可以实现手指的多关节设计,使得最终组成的软体手拥有更大的工作空间,同时该设计使关节充气流道内置入于软体手内部,提高了结构的紧凑性和美观性。
39.当气室内充入压力气体后,气室外壁23由于气室外壁约束层25的限制作用,只能发生弯曲而不能伸长,膨胀壁26则在压力气体作用下发生明显膨胀,并推动对应的支撑发生移动,进而在弯曲梁18的限制下,导致对应的充气式软体关节发生弯曲运动。
40.如果没有嵌入气室外壁约束层25,那么充气后,气室外壁23将发生明显的膨胀运
动,从而导致膨胀壁26在非工作方向上(即弯曲平面的垂线方向)发生大变形,一方面使得达到同样弯曲程度需要更多的压力气体,从而减小了关节响应速度并产生了气体浪费,另一方面发生不必要膨胀后的气室远远超出了手指本身的包络面,从而干涉了相邻手指的运动,影响了可控性,此外,发生不必要膨胀后的气室显得巨大,影响了手指整体的颜值。
41.每根所述手指1的根部均设有摆动关节3,所述摆动关节3包括手指连接架31、摇臂33、舵机34、连杆35以及舵盘36;所述舵机34控制水平设置的舵盘36转动,此为现有技术,故不再赘述;所述舵盘36与水平设置的连杆35的一端偏心连接,所述连杆35的另一端与摇臂33的一端连接,所述摇臂33的另一端与手指连接架31连接,所述手指连接架31与手指1的根部连接,并转动设置在手指安装架5内。
42.手指连接架31用于连接手指1。手指连接架31两相对侧壁的中部对应设有同轴设置的转轴,通过转轴固定在手指安装架5的前支架30以及后支架32之间,摇臂33、舵机34、连杆35以及舵盘36组成一个如图7所示的平行四边形四连杆机构。舵机34的转动通过上述平行四边形四连杆机构传递至手指连接架31的转轴上,从而实现对手指连接架31的摆动驱动,继而实现实现手指1的摆动运动。
43.平行四边形四连杆机构可以将体积较大的舵机34或者其他驱动元件置于较远处的同时可以将转轴尽可能安装于靠近手指根部,以实现更贴近人类手指的关节特征。
44.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同条件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
45.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。