技术特征:
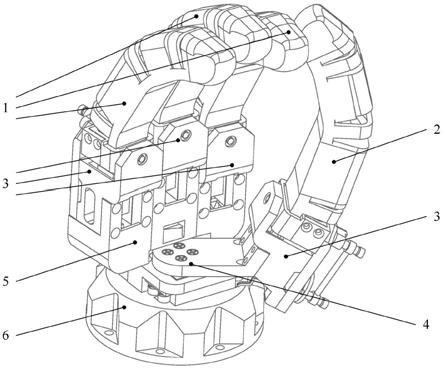
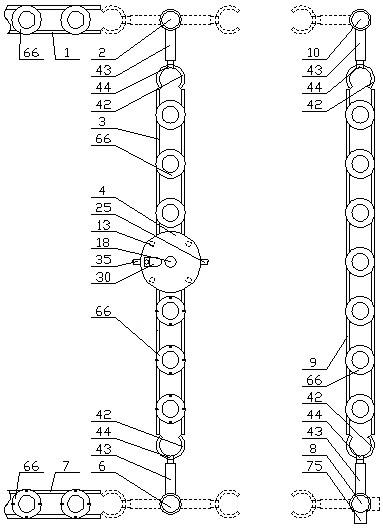
1.一种仿人手气动软体灵巧手,包括拇指基部关节(4)、手指安装架(5)、多根手指(1)以及腕部法兰(6);所述多根手指(1)至少包括拇指(2)、食指、中指以及无名指,所述拇指(2)的根部通过拇指基部关节(4)与手指安装架(5)连接,除拇指(2)外的其他手指(1)的根部与手指安装架(5)连接,所述手指安装架(5)设置在腕部法兰(6)上;其特征在于:每根所述手指(1)上均设有多个气室以及多条关节充气流道,所述多条关节充气流道出气端与多个气室一一对应连通设置。2.根据权利要求1所述的一种仿人手气动软体灵巧手,其特征在于:每根所述手指(1)还包括指尖(13)、弯曲梁和流道组件(14)以及多个支撑;所述指尖(13)和多个支撑与多个气室一一交替连接设置,并指尖(13)、多个支撑以及多个气室均设置在弯曲梁和流道组件(14)上,所述多条关节充气流道均设置在弯曲梁和流道组件(14)内。3.根据权利要求2所述的一种仿人手气动软体灵巧手,其特征在于:所述指尖(13)以及每个支撑均包括拉力柱(17)以及硬质胶体填充物(41),所述拉力柱(17)的端部分别与对应的气室连接,拉力柱(17)的下端与弯曲梁和流道组件(14)连接,所述硬质胶体填充物(41)包裹在拉力柱(17)的外侧。4.根据权利要求3所述的一种仿人手气动软体灵巧手,其特征在于:所述弯曲梁和流道组件(14)还包括纤维约束层(15)以及弯曲梁(18);所述弯曲梁(18)内设有多条关节充气流道,并弯曲梁(18)的上端与拉力柱(17)的下端连接,弯曲梁(18)的下端设有纤维约束层(15)。5.根据权利要求2或4所述的一种仿人手气动软体灵巧手,其特征在于:每个所述气室均包括气室外壁(23)以及膨胀壁(26);所述气室外壁(23)为环状结构,气室外壁(23)设有与对应的关节充气流道连通的进气孔,且气室外壁(23)的两端部分别与对应膨胀壁(26)连通设置,气室外壁(23)以及两侧的膨胀壁(26)封闭围合成膨胀气室,所述膨胀壁(26)与指尖(13)的拉力柱(17)或对应的支撑的拉力柱(17)粘接。6.根据权利要求5所述的一种仿人手气动软体灵巧手,其特征在于:所述气室外壁(23)内嵌有气室外壁约束层(25)。7.根据权利要求1或4或6所述的一种仿人手气动软体灵巧手,其特征在于:每根所述手指(1)的根部均设有摆动关节(3),所述摆动关节(3)包括手指连接架(31)、摇臂(33)、舵机(34)、连杆(35)以及舵盘(36);所述舵机(34)控制水平设置的舵盘(36)转动,所述舵盘(36)与水平设置的连杆(35)的一端偏心连接,所述连杆(35)的另一端与摇臂(33)的一端连接,所述摇臂(33)的另一端与手指连接架(31)连接,所述手指连接架(31)与手指(1)的根部连接,并转动设置在手指安装架(5)内。
技术总结
一种仿人手气动软体灵巧手,属于软体机器人技术领域。所述多根手指至少包括拇指、食指、中指以及无名指,所述拇指的根部通过拇指基部关节与手指安装架连接,除拇指外的其他手指的根部与手指安装架连接,所述手指安装架设置在腕部法兰上;每根所述手指上均设有多个气室以及多条关节充气流道,所述多条关节充气流道出气端与多个气室一一对应连通设置。本发明增加了软体手的工作空间,且在同级别运动速度和负载情况下,所需耗气量更低,提高了手指的反向作用力和作用速度,限制了气室的侧向无效膨胀,减少了气室的耗气量,提高了气室的双向运动速度,紧凑布置气路,提高集成性,尽可能贴近人类手指功能。人类手指功能。人类手指功能。
技术研发人员:李军 石凯
受保护的技术使用者:哈尔滨工业大学
技术研发日:2021.09.27
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。