1.本发明涉及自动化物流运输领域,具体涉及一种窄小物件抓取机器人。
背景技术:
2.随着科技的不断发展,自动化领域也在日益壮大,各个行业也逐步由自动化装置来取代人工劳作。而随着科技的发展,物流运输行业的发展也是在飞速前进,而对物流运输的自动化需求也在不断的增加,自动化的物流运输管理不仅能够有效的减轻人工劳动力,也能够在一定程度上调高物流运输的效率。物流运输过程中,对物件进行分类是必不可少的环节,而物流运输的种类多样,不乏存在一些如零件、迷你杯、智能耳机等较为窄小且易损坏的物件,在自动化的物流运输过程中,如何对窄小易损物件进行抓取来便于后期的物件分类,也是必要解决的问题之一。
3.现有技术中常见的物件抓取机器人,虽也能够将窄小物件进行抓取分类,但物件在抓取后会留有一定的空间,使得物件再被转移的过程中易发生滑落掉出的问题,易造成物件的损坏。
技术实现要素:
4.发明目的:提供一种窄小物件抓取机器人,以解决现有技术存在的上述问题。
5.技术方案:一种窄小物件抓取机器人,包括支撑组件和抓取组件两个部分。所述支撑组件包括了基座、旋转装置和转接装置,所述基座用于对所述抓取机器人的整体支撑,所述旋转装置一端与所述基座固定连接,另一端与所述转接装置固定连接;所述抓取组件包括中心柱和抓持装置,所述中心柱一端与所述转接装置固定连接,另一端与所述抓持装置固定连接。
6.在进一步的实施例中,所述旋转装置包括底座和旋转座两个部分。所述底座与所述基座固定连接,用于对所述旋转装置的整体提供支撑定位;所述旋转座一端与所述底座轴接固定,使得所述旋转座具有绕所述底座水平方向进行转动的灵活度。
7.在进一步的实施例中,所述转接装置包括延长臂、转接臂和转接柱三个部分。所述延长臂一端与所述旋转座的另一端轴接固定,使得所述延长臂具有绕所述旋转座竖直方向进行转动的灵活度;所述转接臂与所述延长臂的另一端轴接固定,具有绕所述延长臂竖直方向进行转动的灵活度;所述转接柱与所述延长臂的另一端轴接固定,使得所述转接柱具有绕所述转接臂竖直方向进行转动的灵活度。
8.在进一步的实施例中,所述抓持装置包括基板、伸缩臂和抓取板三个部分。所述基板与所述中心柱固定连接,用于承载所述抓持装置的各个部件;所述伸缩臂与所述基板固定连接,并置于所述基板工作面的表面,可根据所要进行抓取的物件的大小进行调整;所述抓取板固定于所述伸缩臂的一端,用于对所要进行抓取的物件进行固定。
9.在进一步的实施例中,所述基板工作面的表面设有滑动轨道,所述伸缩臂滑动连接于所述基板工作面表面的滑动轨道内,使得所述伸缩臂具有沿所述基板工作面表面的滑
动轨道进行滑动的灵活度。
10.在进一步的实施例中,所述伸缩臂为多个,并对称式分布于所述基板工作面的表面,且每个伸缩臂均固定连接有抓取板,且所述抓取板具有预定的弯曲弧度;所述多个抓取板之间能够相互契合,使得在后期抓取作业的过程中,所述抓取板之间可形成一个具有预定收容性的抓取盛放空间。
11.在进一步的实施例中,所述转接柱与所述中心柱轴接固定,所述中心柱具有绕所述转接柱水平方向进行转动的灵活度;所述伸缩臂具有预定的弯曲弧度,使得所述伸缩臂可在抓取过程中将抓取物件进行包裹住。
12.有益效果:本发明涉及一种窄小物件抓取机器人,由支撑组件和抓取组件两个部分组成。所述支撑组件设有旋转装置,使得所述抓取机器人整体可进行灵活的转动,能够满足不同的抓取角度。同时,所述抓取组件设有多个相互适配契合的抓取板,能够将所要进行抓取的物件进行包裹;所述抓取组件还进一步设有伸缩臂,可根据物件的宽窄、大小进行距离的调整,使得所要进行抓取的物件能够牢牢的被夹持住,从而避免了在对窄小物件进行抓取、移动的过程中物件因惯性、晃动等因素掉落的问题。
附图说明
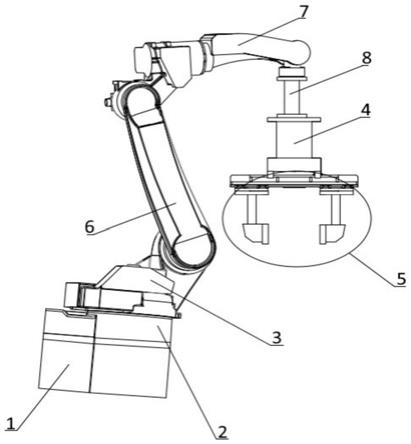
13.图1是本发明所述窄小物件抓取机器人的整体示意图。
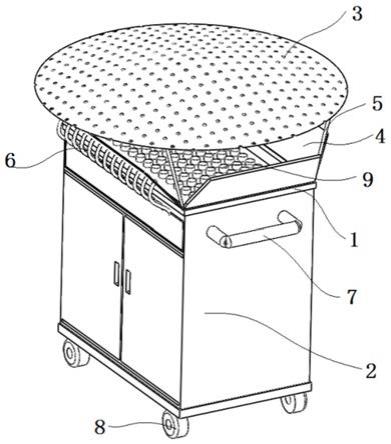
14.图2是本发明所述抓持装置的示意图。
15.图中各附图标记为:基座1、底座2、旋转座3、中心柱4、抓持装置5、延长臂6、转接臂7、转接柱8、基板501、伸缩臂502、抓取板503。
具体实施方式
16.在下文的描述中,给出了大量具体的细节以便提供对本发明更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本发明可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本发明发生混淆,对于本领域公知的一些技术特征未进行描述。
17.实施例一:本实施例提出的窄小物件抓取机器人由支撑组件和抓取组件两个部分组成。所述支撑组件包括了基座1、旋转装置和转接装置三个部分,所述基座1用于对所述抓取机器人的整体支撑,所述旋转装置一端与所述基座1固定连接,另一端与所述转接装置固定连接;所述抓取组件包括中心柱4和抓持装置5两个部分,所述中心柱4一端与所述转接装置固定连接,另一端与所述抓持装置5固定连接。所述旋转装置包括底座2和旋转座3两个部分。所述底座2与所述基座1固定连接,用于对所述旋转装置的整体提供支撑定位;所述旋转座3一端与所述底座2轴接固定,使得所述旋转座3具有绕所述底座2水平方向进行转动的灵活度,后期可根据抓取需求进行转动,从而进行角度的调节。所述转接装置包括延长臂6、转接臂7和转接柱8三个部分。所述延长臂6一端与所述旋转座3的另一端轴接固定,使得所述延长臂6具有绕所述旋转座3竖直方向进行转动的灵活度,在后期的抓取作业过程中,可根据抓取物件的所在位置不同进行高度的调节;所述转接臂7与所述延长臂6的另一端轴接固定,具有绕所述延长臂6竖直方向进行转动的灵活度,在后期的抓取过程中也可根据抓取物件的
位置高度不同来进行相应的高度调节;所述转接柱8与所述延长臂6的另一端轴接固定,使得所述转接柱8具有绕所述转接臂7竖直方向进行转动的灵活度。所述抓持装置5包括基板501、伸缩臂502和抓取板503三个部分。所述基板501与所述中心柱4固定连接,用于承载所述抓持装置5的各个部件;所述伸缩臂502与所述基板501固定连接,并置于所述基板501工作面的表面,可根据所要进行抓取的物件的大小进行调整;所述抓取板503固定于所述伸缩臂502的一端,用于对所要进行抓取的物件进行固定。
18.实施例二:在实施例一的基础之上,所述基板501工作面的表面设有滑动轨道,所述伸缩臂502滑动连接于所述基板501工作面表面的滑动轨道内,使得所述伸缩臂502具有沿所述基板501工作面表面的滑动轨道进行滑动的灵活度。所述伸缩臂502为多个,并对称式分布于所述基板501工作面的表面,且每个伸缩臂502均固定连接有抓取板503;进一步的所述抓取板503具有预定的弯曲弧度,所述多个抓取板503之间能够相互契合,使得在后期抓取作业的过程中,所述抓取板503之间可形成一个具有预定收容性的抓取盛放空间。所述基板501工作面的表面设有滑动轨道,所述伸缩臂502滑动连接于所述基板501工作面表面的滑动轨道内,使得所述伸缩臂502具有沿所述基板501工作面表面的滑动轨道进行滑动的灵活度,使得所述伸缩臂502在后期的抓取作业过程中可根据所要进行抓取的物件的宽窄进行距离调整,进而使得所要进行抓取的物件能够牢固的夹持于过个所述伸缩臂502之间,同时,所述伸缩臂502也可根据所要进行抓取的物件的厚度进行长度的调节,能够保证将抓取的物件包裹夹持。所述转接柱8与所述中心柱4轴接固定,所述中心柱4具有绕所述转接柱8水平方向进行转动的灵活度,进而使得所述转接柱8可在抓取作业过程中根据不同的抓取需求进行调整;所述伸缩臂502具有预定的弯曲弧度,使得所述伸缩臂502可在抓取过程中将抓取物件进行包裹住。
19.基于上述实施例,本发明的工作过程如下:首先,所述旋转装置进行旋转,进而带动所述转接装置和所述抓取组件的整体移动,对所述抓取机器人的整体进行调整,调整至需要进行抓取的物件的相应位置处;然后,所述延长臂6、所述转接臂7进行调整,调整至相应的高度,从而便于后期去所要进行抓取的物件进行抓取作业;接着,所述转接柱8进行沿所述转接臂7的竖直方向进行调整,从而带动所述抓取组件的整体调整,使得抓取组件可对物件进行抓取作业;而后,所述中心柱4会再次进行角度的调整,以满足不同方位物件抓取需求;最后,所述伸缩臂502沿所述基板501工作面表面的滑动轨道进行滑动,调整多个所述伸缩臂502之间的距离,再根据物件的不同需求进行所述伸缩臂502的长度调整。所述伸缩臂502调整至相应的距离和长度后,所述伸缩臂502进行收拢,使得多个所述抓取板503之间能够合拢,形成一个具有预定收容性的盛放空间,将所要进行抓取的物件夹持包裹住。在完成抓取作业后,所述旋转装置再次进行转动,使得完成抓取的物件可进行移动放置。依次重复上述步骤对不同的窄小物件进行抓取,直至所要进行抓取的物件全部抓取完毕为止。
20.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。