1.本发明涉及喷杆式打药机技术领域,具体为一种喷杆式打药机机械臂智能避障控制系统。
背景技术:
2.喷杆式打药机是一种将喷头装在横向喷杆或竖立喷杆上的机动喷雾机。该类喷雾机的作业效率高,喷洒质量好,喷液量分布均匀,适合大面积喷洒各种农药、肥料和植物生产调节剂等的液态制剂,广泛用于大田作物、草坪、苗圃、墙式葡萄园及特定场合。
3.现有技术中,由于农机机械臂较长,农机机械臂在工作的过程中,农机机械臂无法检测到前方障碍,需要人实时查看,较为麻烦。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种喷杆式打药机机械臂智能避障控制系统,具备自动避障的优点,解决了需要人实时查看,较为麻烦的问题。
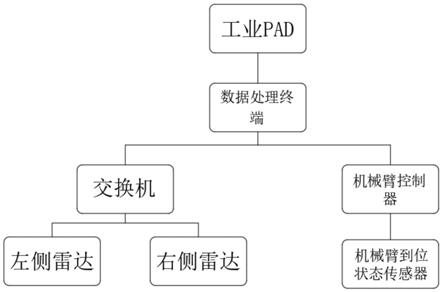
6.(二)技术方案
7.为实现上述目的,本发明提供如下技术方案:一种喷杆式打药机机械臂智能避障控制系统,包括工业pad、数据处理终端、交换机、雷达和机械臂控制器,所述工业pad与所述数据处理终端连接,所述数据处理终端分别与所述交换机和所述机械臂控制器连接,所述交换机与所述雷达连接,所述机械臂控制器与机械臂到位状态传感器连接,所述机械臂到位状态传感器分别与左侧机械臂和右侧机械臂连接。
8.优选的,所述工业pad对所述数据处理终端进行参数初始化。
9.优选的,所述参数初始化的具体参数为实时数据传输和初始化数据传输。
10.优选的,所述实时数据传输包括gps数据接口,接口应包含车辆行驶速度,当前卫星授时、机械臂当前伸展状态和手动模式下,报警信息;
11.所述初始化数据传输包括机械臂最小避障距离、机械臂最大避障距离、雷达扫描上下线设置、机械臂最大响应时间和模式设定。
12.优选的,所述数据处理终端通过千兆网络与所述雷达进行交互。
13.优选的,所述雷达为固态激光雷达。
14.优选的,所述数据处理终端以500ms时间间隔,发送心跳获取命令包,来保证设备连接状态正常。
15.(三)有益效果
16.与现有技术相比,本发明提供了一种喷杆式打药机机械臂智能避障控制系统,具备以下有益效果:
17.以雷达数据处理终端为中心,经过数据计算,得出障碍物信息的方位信息,计算出机械臂避障所需的数据,通过机械臂控制单元控制机械臂状态,完成避障,同时数据通过数
据通信协议,上传至数据终端。
附图说明
18.图1为本发明的系统图;
19.图2为本发明中数据处理终端与机械臂控制器的系统图;
20.图3为本发明的流程图;
21.图4为本发明的系统功能概况图。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.实施例一
24.一种喷杆式打药机机械臂智能避障控制系统,包括工业pad、数据处理终端、交换机、雷达和机械臂控制器,工业pad与数据处理终端连接,数据处理终端分别与交换机和机械臂控制器连接,交换机与雷达连接,机械臂控制器与机械臂到位状态传感器连接,机械臂到位状态传感器分别与左侧机械臂和右侧机械臂连接。
25.本实施例中,工业pad对数据处理终端进行参数初始化。
26.本实施例中,参数初始化的具体参数为实时数据传输和初始化数据传输。
27.本实施例中,实时数据传输包括gps数据接口,接口应包含车辆行驶速度,当前卫星授时、机械臂当前伸展状态和手动模式下,报警信息;
28.初始化数据传输包括机械臂最小避障距离、机械臂最大避障距离、雷达扫描上下线设置、机械臂最大响应时间和模式设定。
29.本实施例中,数据处理终端通过千兆网络与雷达进行交互。
30.本实施例中,雷达为固态激光雷达,固态激光雷达主要是依靠波的反射或接收来探测目标的特性,大多源自三维图像传感器的研究,实际源自红外焦平面成像仪,焦平面探测器的焦平面上排列着感光元件阵列,从无限远处发射的红外线经过光学系统成像在系统焦平面的这些感光元件上,探测器将接受到光信号转换为电信号并进行积分放大、采样保持,通过输出缓冲和多路传输系统,最终送达监视系统形成图像。
31.本实施例中,数据处理终端以500ms时间间隔,发送心跳获取命令包,来保证设备连接状态正常。
32.参阅图1
‑
4,上位机为工业pad,与数据处理终端使用网络传输进行数据交互;
33.数据处理终端与上位机交互通信与下位机进行数据采集分析计算下达控制命令给机械臂控制器;
34.机械臂控制器完成机械臂逻辑控制,实现自动避障。
35.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
技术特征:
1.一种喷杆式打药机机械臂智能避障控制系统,其特征在于:包括工业pad、数据处理终端、交换机、雷达和机械臂控制器,所述工业pad与所述数据处理终端连接,所述数据处理终端分别与所述交换机和所述机械臂控制器连接,所述交换机与所述雷达连接,所述机械臂控制器与机械臂到位状态传感器连接,所述机械臂到位状态传感器分别与左侧机械臂和右侧机械臂连接。2.根据权利要求1所述的一种喷杆式打药机机械臂智能避障控制系统,其特征在于:所述工业pad对所述数据处理终端进行参数初始化。3.根据权利要求2所述的一种喷杆式打药机机械臂智能避障控制系统,其特征在于:所述参数初始化的具体参数为实时数据传输和初始化数据传输。4.根据权利要求3所述的一种喷杆式打药机机械臂智能避障控制系统,其特征在于:所述实时数据传输包括gps数据接口,接口应包含车辆行驶速度,当前卫星授时、机械臂当前伸展状态和手动模式下,报警信息;所述初始化数据传输包括机械臂最小避障距离、机械臂最大避障距离、雷达扫描上下线设置、机械臂最大响应时间和模式设定。5.根据权利要求1所述的一种喷杆式打药机机械臂智能避障控制系统,其特征在于:所述数据处理终端通过千兆网络与所述雷达进行交互。6.根据权利要求1所述的一种喷杆式打药机机械臂智能避障控制系统,其特征在于:所述雷达为固态激光雷达。7.根据权利要求1所述的一种喷杆式打药机机械臂智能避障控制系统,其特征在于:所述数据处理终端以500ms时间间隔,发送心跳获取命令包,来保证设备连接状态正常。
技术总结
本发明涉及喷杆式打药机技术领域,且公开了一种喷杆式打药机机械臂智能避障控制系统,包括工业PAD、数据处理终端、交换机、雷达和机械臂控制器,所述工业PAD与所述数据处理终端连接,所述数据处理终端分别与所述交换机和所述机械臂控制器连接,所述交换机与所述雷达连接,所述机械臂控制器与机械臂到位状态传感器连接,所述机械臂到位状态传感器分别与左侧机械臂和右侧机械臂连接;以雷达数据处理终端为中心,经过数据计算,得出障碍物信息的方位信息,计算出机械臂避障所需的数据,通过机械臂控制单元控制机械臂状态,完成避障,同时数据通过数据通信协议,上传至数据终端。上传至数据终端。上传至数据终端。
技术研发人员:张明宇 齐瑞锋 王强 刘峰 杨晶 史云天 郑永鑫 宋爽 孙鸿 安帅霖 董洪伟 韩子鑫
受保护的技术使用者:吉林省农业机械研究院
技术研发日:2021.09.17
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。