技术特征:
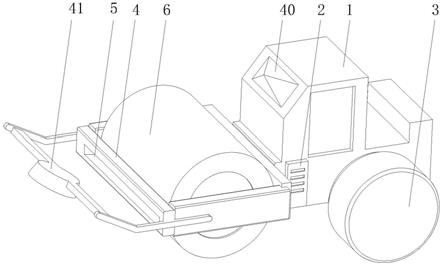
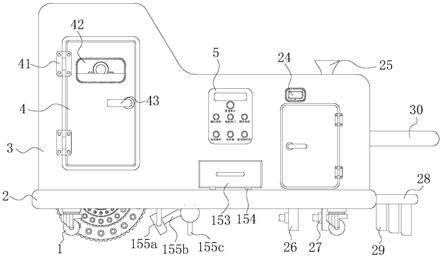
1.全液压压路机,其特征在于,包括车架(1),所述车架(1)的内侧固定安装有液压驱动器(2),且车架(1)的顶端固定安装有远程控制器(40),所述车架(1)的底端设置有两组驱动轮(3),所述车架(1)的一端固定安装有连接架(4),所述连接架(4)的内侧设置有挤压轮(6),所述挤压轮(6)的内侧固定安装有转杆一(7),所述转杆一(7)的两端均与连接架(4)的内侧活动连接,所述挤压轮(6)的内侧固定安装有若干组震动组件(8);所述连接架(4)的前端固定安装有红外线探测器(41);还包括震动频率确定模块,所述震动频率确定模块包括力度检测器一和力度检测器二,所述力度检测器一设置在连接架(4)内侧,所述力度检测器二设置于驱动轮(3)的内侧,通过力度检测器一检测震动组件(8)传递到车架(1)的力度fa,通过力度检测器二检测震动组件(8)传递给地面的力度fb,通过|fa/fb|求得装置的震动频率ω,震动频率确定模块与远程控制器(40)连接;所述红外线探测器(41)用于检测路面平整度,所述远程控制器(40)基于所述红外线探测器(41)调整震动组件(8)的震动频率ω。2.根据权利要求1所述的全液压压路机,其特征在于,所述红外线探测器(41)包括红外发射装置和处理装置,红外发射装置用于发射红外光线进行探测,并将探测到的距离和高度传递给处理装置,处理装置对距离和高度进行处理确定路面平整度,并将路面平整度信息传递给远程控制器(40)。3.根据权利要求2所述的全液压压路机,其特征在于,所述远程控制器(40)基于所述红外线探测器(41)调整震动组件(8)的震动频率ω的具体步骤为:随着路面平整度的提高,提高震动组件(8)的震动频率ω。4.根据权利要求1所述的全液压压路机,其特征在于,所述挤压轮(6)的内侧开设有若干组摇摆槽(9)和撞击槽(12),所述撞击槽(12)和摇摆槽(9)相互连接,所述摇摆槽(9)的内侧设置有摇摆杆(10),所述摇摆杆(10)的一端与震动组件(8)传动连接,所述摇摆杆(10)的外侧靠外端固定安装有转轴一(11),所述转轴一(11)的一端与挤压轮(6)的内侧活动连接,所述摇摆杆(10)远离震动组件(8)的一端固定安装有撞击锤(13)。5.根据权利要求4所述的全液压压路机,其特征在于,所述连接架(4)的一端开设有贯穿槽(5),所述贯穿槽(5)的内侧固定安装有引导板一(21),所述引导板一(21),所述引导板一(21)的一端固定安装有转轴二(24),所述转轴二(24)的外侧活动连接有刮板(23),所述刮板(23)的底端与引导板一(21)之间固定安装有弹簧条一(25),所述刮板(23)的一端活动安装有滑轮,所述刮板(23)的外侧成弧形设置,且刮板(23)的顶端固定安装有撞击块(22),撞击槽(12)的内侧固定安装有若干组摩擦条(15),所述撞击锤(13)的外侧固定安装有若干组延伸条(14),所述延伸条(14)为可弯曲并具有韧性的金属材料。6.根据权利要求5所述的全液压压路机,其特征在于,所述震动组件(8)包括连接柱(16),所述连接柱(16)的内侧开设有椭圆槽(17),所述椭圆槽(17)的内侧滑动连接有椭圆块(19),所述椭圆块(19)的外侧活动连接有转轮(20),且椭圆块(19)的一端传动安装有电机(18),所述电机(18)与挤压轮(6)固定连接。7.根据权利要求6所述的全液压压路机,其特征在于,所述撞击块(22)包括若干组四棱柱(27),所述四棱柱(27)的一端活动连接有连接台(32),所述四棱柱(27)的外侧固定安装有若干组延伸杆(28),且延伸杆(28)的外侧固定安装有顶柱(30),所述连接台(32)与刮板
(23)固定连接,所述延伸杆(28)的外侧固定安装有切割块(29),所述延伸杆(28)的外侧固定安装有研磨块(31)。8.根据权利要求7所述的全液压压路机,其特征在于,所述引导板一(21)的外侧成弧形设置,且贯穿槽(5)的顶端固定安装有引导板二(26),所述引导板二(26)的一端成倒钩形设置,且与连接架(4)的顶端内侧接触连接。9.根据权利要求8所述的全液压压路机,其特征在于,所述引导板一(21)的外侧设置有金属片(39),所述金属片(39)的一端与引导板一(21)固定连接,金属片(39)的另一端与引导板一(21)的外侧滑动卡接,且引导板一(21)的内侧开设有滑槽(33),所述滑槽(33)的内侧滑动连接有撞击球(34),所述撞击球(34)的外侧与滑槽(33)的内壁之间固定安装有若干组弹性绳(35),所述引导板一(21)的内侧开设有若干组蓄能槽(38),所述蓄能槽(38)的内侧滑动连接有弧形条(36),且弧形条(36)的一端固定安装有弹簧条二(37)。10.全液压压路机远程控制系统,其特征在于:该远程控制系统适用于权利要求1
‑
9中任意一项所述的全液压压路机,所述该远程控制系统包括有控制模块、驱动模块和检测模块;所述控制模块包括有控制单元;所述控制单元包括远程控制器(40)和液压驱动器(2),利用液压驱动器(2)控制整个装置进行运转和移动,保证运转的稳定性,通过远程控制器(40)可以接收远程的信号,控制液压驱动器(2)从而控制整体装置进行移动和运转;所述驱动模块包括有驱动单元;所述驱动单元为驱动轮(3),通过驱动轮(3)的顺转和反转来控制装置进行移动,也可以通过驱动轮(3)来转变装置的行驶方向;所述检测模块为红外线探测器(41);所述红外线探测器(41)实时检测路面平整度;震动频率确定模块实时监控震动组件的震动频率;基于路面平整度实时调整震动组件的震动频率。
技术总结
本发明属于压路机领域,具体是全液压压路机远程控制系统,通过该系统可以远程控制装置,进行移动和挤压的功能,从而方便了操作过程,同时可以快速收集各种数据,计算出震动频率ω,同时对装置的震动频率ω进行调整,让装置可以更适应工作地点;全液压压路机,包括车架,所述车架的内侧固定安装有液压驱动器,且车架的顶端固定安装有远程控制器,所述车架的底端设置有两组驱动轮,所述车架的一端固定安装有连接架,所述连接架的内侧设置有挤压轮,从而实现了快速得出震动频率ω的功能,加速了工作过程,提高了工作效率,解决了现有技术调节过程需要耗费较多的时间,还需要收集多组数据才能进行调整完成,导致工作效率较低的问题。题。题。
技术研发人员:杨小月 田绍华 王萍
受保护的技术使用者:山东金马泰机械制造股份有限公司
技术研发日:2021.09.17
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。