1.本实用新型属于焊接机器人技术领域,具体涉及直角坐标焊接机器人。
背景技术:
2.焊接机器人是一种可替代人工焊接工作的可编程、多用途的自动控制操作装置,目前的焊接机器人主要是关节式焊接机器人,关节式焊接机器人结构复杂、稳定性差、承载能力低,除此以外,重复定位精度低,安全性能差。
3.中国发明专利申请cn103111777a提供一种直角坐标系焊接机器人,该焊接机器人通过龙门安装架以及设置在龙门安装架上的焊接头在龙门架上运动实现三维轴向运动,但该种焊接机器人在工作时焊接头在滑块的带动下在滑轨上移动,即使在高精度控制程序下,由于焊接机器人本体具有惯性,需要在焊接时控制滑块的速度,避免发生急停等情况,影响坐标定位的精准性,需降低滑块速度后进行精准定位,降低工作效率。
技术实现要素:
4.本实用新型要解决的技术问题是:针对上述缺陷,本实用新型提供一种直角坐标焊接机器人,该焊接机器人与滑轨相对应的滑块上具有增加摩擦力的可伸缩毛毡,实现焊接头一次性、稳定停在预设位置,焊接精准,结构简单,操作便捷。
5.本实用新型解决其技术问题采用的技术方案如下:直角坐标焊接机器人,包括焊接头、龙门支架以及驱动焊接头运动的驱动电机;
6.所述龙门支架包括两个平行设置的第一滑轨、第二滑轨、带有第一滑块的第一支架、带有第二滑块的第二支架、连接第一支架和第二支架的第三滑轨、第三滑块、与第三滑块固定连接的升降气缸、与升降气缸的升降部分固定连接的旋转机构;
7.所述第一滑轨和第二滑轨沿着y方向设置,所述第一支架和第二支架沿着z方向分别与第一滑轨、第二滑轨垂直设置,所述第一支架、第二支架结构相同、大小相等,所述第三滑轨沿x方向设置,所述的第二滑轨与第一滑轨和第二滑轨、第一支架和第二支架分别在对应的平面上相互垂直;
8.所述第一滑块设置在第一支架侧下方,所述第一滑块与第一滑轨相互配合,所述第一滑块两侧设有可伸缩运动的第一阻挡毛毡,所述第一阻挡毛毡端面小于第一滑块与第一滑轨配合间隙面积;
9.所述第二滑块设置在与第一支架背向的第二支架侧下方,所述第二滑块与第二滑轨相互配合,所述第二滑块两侧设有可伸缩运动的第二阻挡毛毡,所述第二阻挡毛毡端面小于第二滑块与第二滑轨配合的间隙面积;所述第二滑块在第二支架安装位置与第一滑块设置在第一支架的安装高度相同;
10.所述第三滑块与第三滑轨相互配合运动,所述第三滑块两侧设有可伸缩运动的第三阻挡毛毡,所述第三阻挡毛毡端面小于第三滑块与第三滑轨配合的间隙面积;
11.所述旋转机构包括与设置升降气缸端部固定的固定板、设置在固定板上的旋转气
缸,所述旋转气缸与焊接头固定连接;
12.还包括控制器,所述控制器与驱动电机、第一阻挡毛毡、第二阻挡毛毡、第三阻挡毛毡以及第一滑块、第二滑块、第三滑块电连接。
13.该焊接机器人通过三维结构中相互垂直结构形成的龙门支架,其中通过设置侧方的滑块与相对应的滑轨配合,避免了滑块作为主要受力部件,影响龙门支架的使用寿命;每个滑块两端引入可伸缩运动的阻挡毛毡,阻挡毛毡增加了滑块与滑轨停止是的接触面的摩擦力,可以将根据阻挡毛毡的伸缩强度自动调节摩擦力大小,能够实现焊接头一次性、稳定的停在预设的位置上,控制精准,结构简单,操作便捷;控制阻挡毛毡端面与滑块与滑轨配合间隙面积,有效防止阻挡毛毡过于分散引起滑块运动的不畅或卡顿,使用便捷。
14.进一步的,所述第一支架下表面设有第一滚动件,所述第一滚动件下表面与第一滑轨下表面平齐,所述第一滚动件侧方设有第一止动件;
15.所述第二支架下表面设有第二滚动件,所述第二滚动件下表面与第二滑轨下表面平齐,所述第二滚动件侧方设有第二止动件。引入的滚动件和相应的止动件,既便于第一支架与第二支架在第一滑轨与第二滑轨上的运动,降低第一滑块与第二滑块的受力强度,提高龙门支架的使用寿命,又通过止动件限定到位后的第一支架和第二支架,防止在焊接头工作过程中出现错位、偏移的情况,稳定性好。
16.进一步的,所述焊接头包括焊枪头、焊枪壳体,所述焊枪壳体内部具有与外部连通的焊料存储管,所述焊料存储管与焊丝仓连通,所述焊丝仓固定设置在固定板上。
17.更进一步的,所述焊枪壳体外部设有激光传感器,所述激光传感器中线与焊枪头中部所在直线垂直于第一滑轨、第二滑轨之间组成的平面垂直设置;所述激光传感器与控制器电连接。引入的激光传感器监测焊接头到达位置,进一步确保焊接位置的精准性。
18.进一步的,所述焊接头还包括设置在焊料存储管内部的速度传感器,所述速度传感器与控制器电连接。引入的速度传感器可以控制焊接质量,有效防止焊料过多或多少出现焊接品质低、表面粗糙等问题。
19.本实用新型的有益效果是:
20.1、该焊接机器人通过三维结构中相互垂直结构形成的龙门支架,其中通过设置侧方的滑块与相对应的滑轨配合,避免了滑块作为主要受力部件,影响龙门支架的使用寿命;每个滑块两端引入可伸缩运动的阻挡毛毡,阻挡毛毡增加了滑块与滑轨停止是的接触面的摩擦力,可以将根据阻挡毛毡的伸缩强度自动调节摩擦力大小,能够实现焊接头一次性、稳定的停在预设的位置上,控制精准,结构简单,操作便捷;控制阻挡毛毡端面与滑块与滑轨配合间隙面积,有效防止阻挡毛毡过于分散引起滑块运动的不畅或卡顿,使用便捷。
21.2、引入的滚动件和相应的止动件,既便于第一支架与第二支架在第一滑轨与第二滑轨上的运动,降低第一滑块与第二滑块的受力强度,提高龙门支架的使用寿命,又通过止动件限定到位后的第一支架和第二支架,防止在焊接头工作过程中出现错位、偏移的情况,稳定性好;引入的激光传感器监测焊接头到达位置,进一步确保焊接位置的精准性;引入的速度传感器可以控制焊接质量,有效防止焊料过多或多少出现焊接品质低、表面粗糙等问题。
附图说明
22.通过下面结合附图的详细描述,本实用新型前述的和其他的目的、特征和优点将变得显而易见。
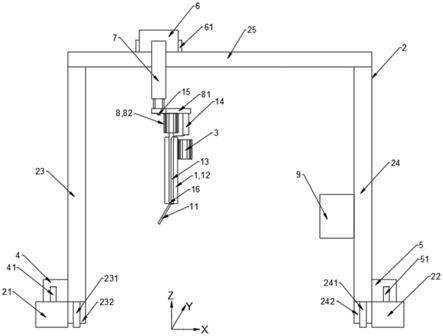
23.图1为本实用新型结构示意图;
24.其中:1为焊接头,11为焊枪头,12为焊枪壳体,13为焊料存储管,14为焊丝仓,15为激光传感器,16为速度传感器,2为龙门支架,21为第一滑轨,22为第二滑轨,23为第一支架,231为第一滚动件,232为第一止动件,24为第二支架,241为第二滚动件,244为第二止动件,25为第三滑轨,3为驱动电机,4为第一滑块,41为第一阻挡毛毡,5为第二滑块,51为第二阻挡毛毡,6为第三滑块,61为第三阻挡毛毡,7为升降气缸,8为旋转机构,81为固定板,82为旋转气缸,9为控制器。
具体实施方式
25.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
26.参照图1,直角坐标焊接机器人,包括焊接头1、龙门支架2以及驱动焊接头1运动的驱动电机3;
27.所述龙门支架2包括两个平行设置的第一滑轨21、第二滑轨22、带有第一滑块4的第一支架23、带有第二滑块5的第二支架24、连接第一支架23和第二支架24的第三滑轨25、第三滑块6、与第三滑块6固定连接的升降气缸7、与升降气缸7的升降部分固定连接的旋转机构8;
28.所述第一滑轨21和第二滑轨22沿着y方向设置,所述第一支架23和第二支架24沿着z方向分别与第一滑轨21、第二滑轨22垂直设置,所述第一支架23、第二支架24结构相同、大小相等,所述第三滑轨25沿x方向设置,所述的第二滑轨22与第一滑轨21和第二滑轨22、第一支架23和第二支架24分别在对应的平面上相互垂直;所述第一支架23下表面设有第一滚动件231,所述第一滚动件231下表面与第一滑轨21下表面平齐,所述第一滚动件231侧方设有第一止动件232;所述第二支架24下表面设有第二滚动件241,所述第二滚动件241下表面与第二滑轨22下表面平齐,所述第二滚动件241侧方设有第二止动件244。
29.所述第一滑块4设置在第一支架23侧下方,所述第一滑块4与第一滑轨21相互配合,所述第一滑块4两侧设有可伸缩运动的第一阻挡毛毡41,所述第一阻挡毛毡41端面小于第一滑块4与第一滑轨21配合间隙面积;
30.所述第二滑块5设置在与第一支架23背向的第二支架24侧下方,所述第二滑块5与第二滑轨22相互配合,所述第二滑块5两侧设有可伸缩运动的第二阻挡毛毡51,所述第二阻挡毛毡51端面小于第二滑块5与第二滑轨22配合的间隙面积;所述第二滑块5在第二支架24安装位置与第一滑块4设置在第一支架23的安装高度相同;
31.所述第三滑块6与第三滑轨25相互配合运动,所述第三滑块6两侧设有可伸缩运动的第三阻挡毛毡61,所述第三阻挡毛毡61端面小于第三滑块6与第三滑轨25配合的间隙面积;
32.所述旋转机构8包括与设置升降气缸7端部固定的固定板81、设置在固定板81上的
旋转气缸82,所述旋转气缸82与焊接头1固定连接;
33.还包括控制器9,所述控制器9与驱动电机3、第一阻挡毛毡41、第二阻挡毛毡51、第三阻挡毛毡61以及第一滑块4、第二滑块5、第三滑块6电连接。
34.所述焊接头1包括焊枪头11、焊枪壳体12,所述焊枪壳体12内部具有与外部连通的焊料存储管13,所述焊料存储管13与焊丝仓14连通,所述焊丝仓14固定设置在固定板81上;所述焊枪壳体12外部设有激光传感器15,所述激光传感器15中线与焊枪头11中部所在直线垂直于第一滑轨21、第二滑轨22之间组成的平面垂直设置;所述焊接头1还包括设置在焊料存储管13内部的速度传感器16,所述激光传感器15、速度传感器16与控制器9电连接。
35.该焊接机器人通过三维结构中相互垂直结构形成的龙门支架,其中通过设置侧方的滑块与相对应的滑轨配合,避免了滑块作为主要受力部件,影响龙门支架的使用寿命;每个滑块两端引入可伸缩运动的阻挡毛毡,阻挡毛毡增加了滑块与滑轨停止是的接触面的摩擦力,可以将根据阻挡毛毡的伸缩强度自动调节摩擦力大小,能够实现焊接头一次性、稳定的停在预设的位置上,控制精准,结构简单,操作便捷;控制阻挡毛毡端面与滑块与滑轨配合间隙面积,有效防止阻挡毛毡过于分散引起滑块运动的不畅或卡顿,使用便捷;引入的滚动件和相应的止动件,既便于第一支架与第二支架在第一滑轨与第二滑轨上的运动,降低第一滑块与第二滑块的受力强度,提高龙门支架的使用寿命,又通过止动件限定到位后的第一支架和第二支架,防止在焊接头工作过程中出现错位、偏移的情况,稳定性好;
36.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。