1.本实用新型涉及环境应急监测无人机技术领域,尤其涉及一种环境应急监测无人机。
背景技术:
2.环境监测是指通过对影响环境质量因素的代表值的测定,确定环境质量(或污染程度)及其变化趋势,了解环境水平,进行环境监测,是开展一切环境工作的前提,环境监测的过程一般为环境实时监测与信息采集,在有些环境较为恶劣的地方就需要环境应急监测无人机进行监测,无人机上设置有可以投放传感节点的无人机系统,此系统主要由无人机与地面站两大分系统构成,通过zig bee与无线串口的信息互联方式来进行实时数据的采集与监测上传,在整体系统中无人机担任定点投掷平台、空中信息采集平台与数据传输中转平台;地面站系统负责人机交互,交互信息包括传感信息、地图信息、视频信息与控制信号,且无人机上安装有摄像头与gps模块分别进行视频信号的上传与卫星地图的测定显示。
3.现有的环境应急监测无人机,其上的摄像头大多是直接固定在无人机底部,或通过固定保护套的方式对摄像头进行挡护;其存在不便于始终保持摄像头垂直向下的功能,在飞行时,其摄像头会随着无人机升降倾斜或侧倾斜,造成不能有效保障拍摄采集的影像和照片等资料均是平面资料,且不便于自动对保护套底部沾附的灰尘进行擦拭清理,在雾霾较大的地方,容易造成灰尘沾附在保护套上,进而对摄像头进行遮挡,导致拍摄的画面不清晰,不能满足使用需求,综合上述情况加以改进,因此我们提出了一种环境应急监测无人机用于解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种环境应急监测无人机。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种环境应急监测无人机,包括监控无人机本体,所述监控无人机本体包括无人机支板以及设置在无人机支板下方的摄像头,所述无人机支板的底部嵌装有底部为开口设置的安装盒,安装盒的下方设有回形透明防护框,摄像头位于回形透明防护框内,安装盒的顶部内壁上固定安装有固定块,固定块的底部固定安装有梯形块,回形透明防护框的两侧内壁分别与梯形块的两侧固定连接,梯形块的底部嵌装有自适应角度调节机构,自适应角度调节机构与摄像头的顶部固定安装,回形透明防护框的底部左侧转动安装有透明板,透明板的右侧开设有矩形槽,矩形槽内滑动安装有快速卡固机构,回形透明防护框的右侧底部固定安装有卡块,快速卡固机构的右侧延伸至透明板的右侧,快速卡固机构活动卡装在卡块上,回形透明防护框的两侧均设有u形杆,u形杆的底部内壁上固定安装有清理杆,清理杆的顶部粘接固定有擦拭棉,擦拭棉的顶部与透明板的底部平齐,安装盒的两侧内壁之间转动安装有螺纹驱动机构,u形杆的顶部与螺纹驱动机构固定连接,固定块转动套设在螺纹
驱动机构上,无人机支板的底部嵌装有驱动电机,驱动电机的底部固定并电性连接有无线遥控开关,无线遥控开关匹配设置有外部遥控器,驱动电机的输出轴左端与螺纹驱动机构的右侧固定连接。
7.优选的,所述自适应角度调节机构包括嵌装在梯形块底部的万向球,万向球的底部固定安装有配重块,摄像头的顶部固定安装有插块,配重块活动套设在插块上,插块螺纹紧固在配重块上。
8.优选的,所述快速卡固机构包括滑动套设在矩形槽内的回形杆,回形杆的右侧延伸至透明板的右侧并固定连接有移动杆,移动杆的右侧固定连接有拉环,移动杆活动卡装在卡块上,矩形槽的顶部内壁和底部内壁之间固定连接有矩形块,矩形块滑动套设在回形杆内,矩形块的左侧与回形杆的左侧内壁之间固定连接有弹簧。
9.优选的,所述螺纹驱动机构包括两个往复丝杠,两个往复丝杠相互远离的一端分别与安装盒的两侧内壁转动安装,两个往复丝杠相互靠近的一端相焊接,两个往复丝杠的螺纹旋向相反,往复丝杠上螺纹套设有移动块,移动块滑动安装在安装盒的顶部内壁上,移动块的底部与对应的u形杆的顶部固定连接,驱动电机的输出轴左端与两个往复丝杠中位于右侧的往复丝杠的右端固定连接,固定块转动套设在两个往复丝杠上。
10.优选的,所述u形杆的前侧内壁和后侧内壁之间的距离比回形透明防护框的前侧和后侧之间的距离大。
11.优选的,所述插块的右侧开设有螺纹槽,螺纹槽内螺纹套设有t形紧固螺栓,配重块螺纹套设在t形紧固螺栓上。
12.优选的,所述移动杆的左侧顶部开设有卡槽,卡槽的内壁与卡块的外侧活动接触。
13.优选的,所述移动块的一侧开设有往复丝孔,往复丝孔与对应的往复丝杠螺纹连接,安装盒的顶部内壁上固定安装有两个t形滑轨,两个t形滑轨相互靠近的一侧分别与固定块的两侧固定连接,移动块的顶部开设有两侧均为开口设置的t形滑槽,t形滑轨与对应的t形滑槽滑动连接。
14.与现有的技术相比,本实用新型的有益效果是:
15.通过无人机支板、摄像头、回形透明防护框、透明板、安装盒、往复丝杠、移动块、驱动电机、无线遥控开关、u形杆、清理杆、擦拭棉、矩形槽、移动杆、卡块、回形杆、矩形块、弹簧、梯形块、万向球与配重块相配合,无人机本体在飞行的过程中发生倾斜时,会通过无人机支板依次带动安装盒、固定块、梯形块和回形透明防护框整体倾斜,配重块在自身重力作用下,始终保持向下不会倾斜,因此与配重块固定的万向球和摄像头均不会发生运动,从而达到能够保证摄像头不受影响并始终保持垂直向下状态,当需要对透明板的底部进行擦拭清理时,通过外部遥控器操控驱动电机启动,驱动电机带动两个往复丝杠转动,两个往复丝杠转动带动两个移动块往复移动,移动块通过对应的u形杆带动清理杆和擦拭棉往复左右移动并对透明板的底部进行擦拭清理,保证透明板的清晰度;
16.当需要解除对摄像头的遮挡,将其取下时,可向右拉动拉环带动移动杆向右移动与卡块分离,移动杆带动回形杆在矩形槽内滑动并对弹簧进行压缩,此时即可向下转动透明板解除对摄像头的遮挡,正向转动t形快固螺栓从螺纹槽内移出,此时即可向下拉动摄像头从回形透明防护框内取下,方便后期的检修作业。
17.本实用新型设计合理,配重块和万向球的配合,能够在无人机本体发生倾斜时,保
证摄像头不受影响并始终保持垂直向下状态,有效避免飞行中出现倾斜造成不能稳定摄拍平面的现象,便于自动对透明板的底部进行擦拭清理,保证透明板的清晰度,保证拍摄画面的清晰度,且能够快速解除对摄像头的遮挡并将其从回形透明防护框内取出,为后期检修作业提供方便。
附图说明
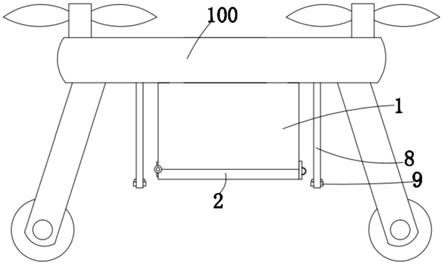
18.图1为本实用新型提出的一种环境应急监测无人机的结构示意图;
19.图2为图1的剖视结构示意图;
20.图3为图2中a部分的放大结构示意图。
21.图中:100无人机支板、101摄像头、1回形透明防护框、2透明板、3安装盒、4往复丝杠、5移动块、6驱动电机、7无线遥控开关、8u形杆、9清理杆、10擦拭棉、11矩形槽、12移动杆、13卡块、14回形杆、15矩形块、16弹簧、17梯形块、18万向球、19配重块。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
23.参照图1
‑
3,一种环境应急监测无人机,包括监控无人机本体,监控无人机本体包括无人机支板100以及设置在无人机支板100下方的摄像头101,无人机支板100的底部嵌装有底部为开口设置的安装盒3,安装盒3的下方设有回形透明防护框1,摄像头101位于回形透明防护框1内,安装盒3的顶部内壁上固定安装有固定块,固定块的底部固定安装有梯形块17,回形透明防护框1的两侧内壁分别与梯形块17的两侧固定连接,梯形块17的底部嵌装有自适应角度调节机构,自适应角度调节机构与摄像头101的顶部固定安装,回形透明防护框1的底部左侧转动安装有透明板2,透明板2的右侧开设有矩形槽11,矩形槽11内滑动安装有快速卡固机构,回形透明防护框1的右侧底部固定安装有卡块13,快速卡固机构的右侧延伸至透明板2的右侧,快速卡固机构活动卡装在卡块13上,回形透明防护框1的两侧均设有u形杆8,u形杆8的底部内壁上固定安装有清理杆9,清理杆9的顶部粘接固定有擦拭棉10,擦拭棉10的顶部与透明板2的底部平齐,安装盒3的两侧内壁之间转动安装有螺纹驱动机构,u形杆8的顶部与螺纹驱动机构固定连接,固定块转动套设在螺纹驱动机构上,无人机支板100的底部嵌装有驱动电机6,驱动电机6的底部固定并电性连接有无线遥控开关7,无线遥控开关7匹配设置有外部遥控器,驱动电机6的输出轴左端与螺纹驱动机构的右侧固定连接;
24.自适应角度调节机构包括嵌装在梯形块17底部的万向球18,万向球18的底部固定安装有配重块19,摄像头101的顶部固定安装有插块,配重块19活动套设在插块上,插块螺纹紧固在配重块19上;
25.快速卡固机构包括滑动套设在矩形槽11内的回形杆14,回形杆14的右侧延伸至透明板2的右侧并固定连接有移动杆12,移动杆12的右侧固定连接有拉环,移动杆12活动卡装在卡块13上,矩形槽11的顶部内壁和底部内壁之间固定连接有矩形块15,矩形块15滑动套设在回形杆14内,矩形块15的左侧与回形杆14的左侧内壁之间固定连接有弹簧16;
26.螺纹驱动机构包括两个往复丝杠4,两个往复丝杠4相互远离的一端分别与安装盒3的两侧内壁转动安装,两个往复丝杠4相互靠近的一端相焊接,两个往复丝杠4的螺纹旋向相反,往复丝杠4上螺纹套设有移动块5,移动块5滑动安装在安装盒3的顶部内壁上,移动块5的底部与对应的u形杆8的顶部固定连接,驱动电机6的输出轴左端与两个往复丝杠4中位于右侧的往复丝杠4的右端固定连接,固定块转动套设在两个往复丝杠4上,本实用新型设计合理,配重块19和万向球18的配合,能够在无人机本体发生倾斜时,保证摄像头101不受影响并始终保持垂直向下状态,有效避免飞行中出现倾斜造成不能稳定摄拍平面的现象,便于自动对透明板2的底部进行擦拭清理,保证透明板2的清晰度,保证拍摄画面的清晰度,且能够快速解除对摄像头101的遮挡并将其从回形透明防护框1内取出,为后期检修作业提供方便。
27.本实用新型中,u形杆8的前侧内壁和后侧内壁之间的距离比回形透明防护框1的前侧和后侧之间的距离大,插块的右侧开设有螺纹槽,螺纹槽内螺纹套设有t形紧固螺栓,配重块19螺纹套设在t形紧固螺栓上,移动杆12的左侧顶部开设有卡槽,卡槽的内壁与卡块13的外侧活动接触,移动块5的一侧开设有往复丝孔,往复丝孔与对应的往复丝杠4螺纹连接,安装盒3的顶部内壁上固定安装有两个t形滑轨,两个t形滑轨相互靠近的一侧分别与固定块的两侧固定连接,移动块5的顶部开设有两侧均为开口设置的t形滑槽,t形滑轨与对应的t形滑槽滑动连接,本实用新型设计合理,配重块19和万向球18的配合,能够在无人机本体发生倾斜时,保证摄像头101不受影响并始终保持垂直向下状态,有效避免飞行中出现倾斜造成不能稳定摄拍平面的现象,便于自动对透明板2的底部进行擦拭清理,保证透明板2的清晰度,保证拍摄画面的清晰度,且能够快速解除对摄像头101的遮挡并将其从回形透明防护框1内取出,为后期检修作业提供方便。
28.工作原理:使用时,当无人机本体在飞行的过程中发生倾斜时,使得无人机支板100发生倾斜,无人机支板100依次通过安装盒3、固定块和梯形块17带动回形透明防护框1整体倾斜,配重块19在自身重力作用下,始终保持向下不会倾斜,因此与配重块19固定的万向球18和摄像头101均不会发生运动,此时倾斜的梯形块17在万向球18外侧滑动,从而达到能够保证摄像头101不受影响并始终保持垂直向下状态,有效避免飞行中出现倾斜造成不能稳定摄拍平面的现象;
29.当在雾霾较大的天气时,容易造成灰尘颗粒沾附在透明板2的底部,进而影响摄像头101的拍摄清晰度,当需要对透明板2的底部进行擦拭清理时,通过外部遥控器操控无线遥控开关7控制驱动电机6启动,驱动电机6的输出轴带动两个往复丝杠4转动,在开设在移动块5上的往复丝孔作用下,两个往复丝杠4转动带动两个移动块5往复移动,移动块5带动对应的u形杆8往复左右移动,u形杆8带动对应的清理杆9往复左右移动,清理杆9带动对应的擦拭棉10往复左右移动并对透明板2的底部进行擦拭清理,从而实现自动对透明板2底部沾附的灰尘进行擦拭的目的,保证透明板2的清晰度;
30.当需要解除对摄像头101的遮挡,将其取下时,可向右拉动拉环带动移动杆12向右移动,移动杆12带动回形杆14在矩形槽11内滑动并对弹簧16进行压缩,移动杆12带动卡槽与卡块13分离,解除对透明板2的固定,此时即可向下转动透明板2解除对摄像头101的遮挡,即可将手伸进回形透明防护框1内,正向转动t形快固螺栓使其从螺纹槽内移出,解除对插块的固定,此时即可向下拉动摄像头101带动插块与配重块19分离,即可将摄像头101取
下,方便后期的检修作业。
31.本实用的描述中,还需要说明的是,除非另有明确的规定和限制,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接,可以是机械连接,也可以是电连接,可以是直接连接,也可以是通过中间媒介相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用中的具体含义。
32.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。