1.本实用新型涉及机械摆臂技术领域,特别是一种自动上下管料装置的机械摆臂装置。
背景技术:
2.机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统。因其独特的操作灵活性,已在工业装配,安全防爆等领域得到广泛应用。
3.尤其在工业装配领域,经常需要进行上下料工作,上下料是一项重复而繁琐的工序,传统上下料是采用人工操作,但是人工操作效率低,长时间工作容易劳累分心导致出错,而且安全性得不到保障。
技术实现要素:
4.为了克服现有技术的上述缺点,本实用新型的目的是提供一种自动上下管料装置的机械摆臂装置,以解决上述背景技术提出的问题。
5.本实用新型解决其技术问题所采用的技术方案是:一种自动上下管料装置的机械摆臂装置,包括法兰底盘、第一旋转机构、第一机械臂、第二旋转机构、第二机械臂和机械爪,所述第一旋转机构装于法兰底盘上方,所述第一旋转机构与第一机械臂连接,所述第一机械臂另一端与第二旋转机构侧方连接,所述第二旋转机构上方与第二机械臂连接,所述第二机械臂另一端与机械爪连接,所述机械爪设有抓取机构,所述抓取机构设有取料夹块装置,所述取料夹块装置用于夹取和固定管料,所述取料夹块装置一侧设有半圆镂空结构,所述两个半圆镂空结构对应组合而成取料口,所述取料口旁设有感应管料保护装置,所述感应管料保护装置装于保护装置轨道上,所述感应管料保护装置用于加强固定和保护管料输送。
6.作为本实用新型的进一步改进:所述法兰底盘与第一旋转机构螺栓固定连接,所述法兰底盘为空心结构,所述空心结构用于管线走线。
7.作为本实用新型的进一步改进:所述第一旋转机构侧方与第一机械臂一端侧边铰接连接,所述第一机械臂以第一旋转机构为轴心转动,所述第一旋转机构设有转动角度限制,使第一机械臂只能在固定角度内转动。
8.作为本实用新型的进一步改进:所述第一机械臂另一端与第二旋转机构侧方铰接连接,所述第一机械臂与第一旋转机构、第二旋转机构连接端为同一侧,所述第一机械臂内部为中空结构,所述中空结构用于控制管线走线。
9.作为本实用新型的进一步改进:所述第二旋转机构以第一机械臂为轴心转动,所述第二旋转机构上方与第二机械臂一端固定螺栓连接。
10.作为本实用新型的进一步改进:所述第二机械臂另一端与机械爪铰接连接,所述第二机械臂另一端与机械爪连接为母端连接。
11.作为本实用新型的进一步改进:所述机械爪与第二机械臂连接的一端为公端连
接,所述机械爪包括旋转机构、抓取机构。
12.作为本实用新型的进一步改进:所述抓取机构设有四组取料夹块装置,所述取料夹块装置每组设有6个取料口。
13.作为本实用新型的进一步改进:所述第一机械臂、第二旋转机构、第二机械臂和机械爪通过单片机控制装置来控制,所述第一机械臂、第二旋转机构、第二机械臂和机械爪通过控制线与单片机控制装置连接。
14.与现有技术相比,本实用新型的有益效果是:通过自动上下管料装置的机械摆臂装置实现代替人工上下料操作,机械摆臂装置能批量处理、长时间不间断工作,极大的提高上下管料的效率,同时,减少人员的参与,安全性得到提高,机械摆臂通过单片机编程控制,移动、旋转动作都经过严谨编制,相对于人工操作,更加的快速、准确,更能保证质量稳定。
附图说明
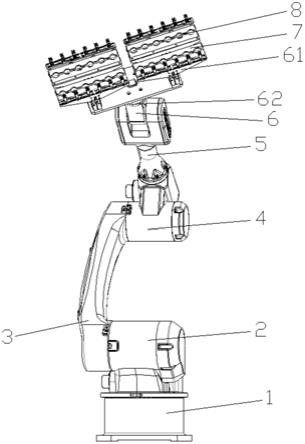
15.图1为本实用新型的结构示意图。
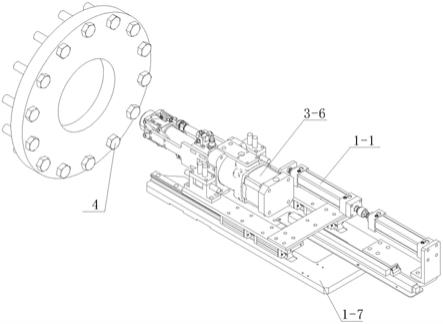
16.图2为本实用新型抓取机构结构示意图。
具体实施方式
17.现结合附图说明与实施例对本实用新型进一步说明:如图1、图2所示,本实用新型实施方式公开的一种自动上下管料装置的机械摆臂装置,包括法兰底盘1、第一旋转机构2、第一机械臂3、第二旋转机构4、第二机械臂5和机械爪6,所述第一旋转机构2装于法兰底盘1上方,所述第一旋转机构2与第一机械臂3连接,所述第一机械臂3另一端与第二旋转机构4侧方连接,所述第二旋转机构4上方与第二机械臂5连接,所述第二机械臂5另一端与机械爪6连接,所述机械爪6设有抓取机构61,所述抓取机构61设有取料夹块装置7,所述取料夹块装置7用于夹取和固定管料,所述取料夹块装置7一侧设有半圆镂空结构,所述两个半圆镂空结构对应组合而成取料口8,所述取料口8旁设有感应管料保护装置9,所述感应管料保护装置9装于保护装置轨道91上,所述感应管料保护装置9用于加强固定和保护管料输送。
18.所述法兰底盘1与第一旋转机构2螺栓固定连接,所述法兰底盘1为空心结构,所述空心结构用于管线走线。
19.所述第一旋转机构2侧方与第一机械臂3一端侧边铰接连接,所述第一机械臂3以第一旋转机构2为轴心转动,所述第一旋转机构2设有转动角度限制,使第一机械臂3只能在固定角度内转动。
20.所述第一机械臂3另一端与第二旋转机构4侧方铰接连接,所述第一机械臂3与第一旋转机构2、第二旋转机构4连接端为同一侧,所述第一机械臂3内部为中空结构,所述中空结构用于控制管线走线。
21.所述第二旋转机构4以第一机械臂3为轴心转动,所述第二旋转机构4上方与第二机械臂5一端固定螺栓连接。
22.所述第二机械臂5另一端与机械爪6铰接连接,所述第二机械臂5另一端与机械爪6连接为母端连接。
23.所述机械爪6与第二机械臂5连接的一端为公端连接,所述机械爪6包括旋转机构62、抓取机构61,所述机械爪6以机械爪6与第二机械臂5连接处为轴心,机械爪6绕轴心转
动,所述旋转机构62能够360
°
转动。
24.所述抓取机构61设有四组取料夹块装置7,所述取料夹块装置7每组设有6个取料口8。
25.为了保护管料在移动中不会脱落,所述取料夹块装置7夹紧管料,所述感应管料保护装置9感应管料的位置,并移动到管料位置与管料接触、固定。
26.所述第一机械臂3、第二旋转机构4、第二机械臂5和机械爪6通过单片机控制装置来控制,所述第一机械臂3、第二旋转机构4、第二机械臂5和机械爪6通过控制线与单片机控制装置连接。
27.所述机械爪6和抓取机构61设有其它不同样式替换,用于不同场景,满足不同的上下料操作需要。
28.本实用新型的工作原理:通过单片机控制装置制定自动上下管料的程序,控制上下管料设备,自动理管装置把管料整理好以后,单片机给机械摆臂信号,操作机械摆臂的第一旋转机构2、第一机械臂3、第二旋转机构4、第二机械臂5和机械爪6进行动作,其中,第一旋转机构2以水平面转动,第一机械臂3以第一旋转机构2为轴中旋转,第二旋转机构4以第一机械臂3为轴心旋转,机械爪6在与第二机械臂5连接处可上下转动,机械臂根据信号移动和转动到设定位置,并用机械爪6的抓取机构61抓取管料,把管料移动到下一工序的位置,完成上下料工作。
29.本实用新型的主要功能:提供一种自动上下管料装置的机械摆臂装置,实现代替人工上下料操作,机械摆臂装置能批量处理、长时间不间断工作,极大的提高上下管料的效率,同时,减少人员的参与,安全性得到提高,机械摆臂通过单片机编程控制,移动、旋转动作都经过严谨编制,相对于人工操作,更加的快速、准确,更能保证质量稳定。
30.综上所述,本领域的普通技术人员阅读本实用新型文件后,根据本实用新型的技术方案和技术构思无需创造性脑力劳动而作出其他各种相应的变换方案,均属于本实用新型所保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。