1.本实用新型属于电梯控制领域,尤其涉及一种适用于机器人乘坐的电梯系统。
背景技术:
2.物流配送的成本压力使得配送机器人正逐渐应用于送货、送餐等各种短距离配送场景,这种无人化的配送方式不仅可以节约人力成本,还可提高用户的趣味性体验,并在一定程度上保障用户购物的私密性,所以配送机器人在短距离配送中的应用必定会越来越广泛。
3.目前,配送机器人的应用场景已不满足平层空间内的移动,拓展在多层酒店、写字楼等室内应用场景是趋势所向,而自主乘坐电梯则是配送机器人在多层室内场景中必备的功能。
4.梯控模块是配送机器人自主乘坐电梯的基础。梯控模块接收到配送机器人发送的乘梯信号(乘梯触发指令和要到达的目标楼层)之后,会控制电梯轿厢中的内呼按键对应的楼层按键按下再松开,使电梯控制主机得知需要到达的楼层。但现在部分电梯有消号功能,即使按下到达目标楼层的内呼按键,也可能遭遇中途消号,取消到达该目标楼层,使电梯在该目标楼层不停靠,以致影响机器人的正常配送。
技术实现要素:
5.本实用新型所要解决的技术问题为如何在具有消号功能的电梯系统中保证配送机器人的正常乘梯。
6.为解决上述技术问题,本实用新型是这样实现的,一种适用于机器人乘坐的电梯系统,所述电梯系统包括:
7.轿厢;
8.电梯控制主机,用于控制所述轿厢的运行以及接收机器人发送的包含目标楼层信息的内呼指令;
9.设置于所述轿厢内的内呼操控板,包括若干与楼层对应的内呼按键,用于实现目标楼层的选定操作;
10.若干内呼指示灯,设置于所述轿厢内与各所述内呼按键一一对应设置,各内呼指示灯在对应的内呼按键被选定时点亮;
11.设置于所述轿厢内的梯控模块,与所述电梯控制主机连接,接收所述电梯控制主机转发的内呼指令后将从中解析出的机器人目标楼层信息发送至所述电梯控制主机;还与所述若干内呼指示灯连接,用于在所述轿厢到达机器人的目标楼层之前检测到目标楼层对应的内呼指示灯的状态符合预置的消号条件时,将机器人的目标楼层信息再次发送至所述电梯控制主机。
12.进一步地,所述梯控模块还与所述内呼按键连接,所述梯控模块在解析出机器人目标楼层信息后,控制与目标楼层对应的内呼按键被选定。
13.进一步地,所述梯控模块还与所述内呼按键连接,所述梯控模块在所述轿厢到达机器人的目标楼层之前检测到目标楼层对应的内呼指示灯的状态符合预置的消号条件时,控制目标楼层对应的内呼按键再次被选定。
14.进一步地,所述梯控模块与各所述内呼指示灯之间均连接有光电隔离器件,所述梯控模块通过所述光电隔离器件采集目标楼层的内呼指示灯的状态。
15.进一步地,所述电梯系统包括:内呼指示灯控制模块,与所述若干内呼指示灯一一连接,用于在有内呼按键被选定时向对应的内呼指示灯发送点亮指令;所述梯控模块连接至所述内呼指示灯控制模块与各内呼指示灯之间的线路上,当检测到在到达机器人目标楼层之前所述内呼指示灯控制模块发送至对应的内呼指示灯的控制指令由点亮指令变为非点亮指令时,确认对应的内呼指示灯的状态符合预置的消号条件。
16.进一步地,所述电梯系统还包括:布设在各楼层的若干外呼按键,与所述电梯控制主机连接,用于在各楼层实现外呼指令的触发操作;布设在各楼层的若干外呼指示灯,与各所述外呼按键一一对应设置,各外呼指示灯在对应的外呼按键被触发时点亮;所述梯控模块与所述若干外呼按键连接,接收所述电梯控制主机转发的机器人的外呼指令并将从中解析出的机器人出发楼层信息发送至所述电梯控制主机,控制与机器人出发楼层对应的外呼按键被选定。
17.进一步地,所述电梯控制主机还用于将基于所述外呼指令与内呼指令得到的电梯运行状态发送至待乘梯的机器人。
18.进一步地,所述梯控模块与各所述外呼指示灯之间连接有光电隔离器件,所述梯控模块通过所述光电隔离器件采集各所述外呼指示灯的状态。
19.进一步地,所述内呼指示灯控制模块与所述梯控模块连接,在有内呼按键被选定时所述内呼指示灯控制模块默认控制所述第一颜色的指示灯点亮;在所述梯控模块接收到所述电控控制主机转发的机器人内呼指令后,所述内呼指示灯控制模块控制所述第二颜色的指示灯点亮。
20.进一步地,所述电梯系统还包括:提醒模块,与所述梯控模块连接,用于在所述梯控模块的控制下以预置的提醒方式提醒所述轿厢内的乘梯人员勿对机器人目标楼层的内呼按键进行消号操作。
21.本实用新型所提供的电梯系统中,通过梯控模块检测机器人的目标楼层对应的内呼指示灯的状态,当检测到该对应的内呼指示灯的状态符合预置的消号条件时,将机器人的目标楼层信息再次发送至所述电梯控制主机,从而实现防消号功能,可保证配送机器人的正常乘梯配送。
附图说明
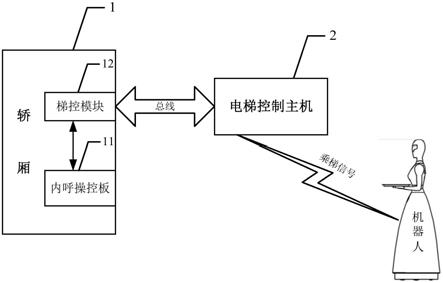
22.图1是本实用新型第一实施例提供的电梯系统的结构图;
23.图2是本实用新型第一实施例提供的内呼操控板的示意图;
24.图3是本实用新型第一实施例以圆形为例示出的内呼按键和内呼指示灯的示意图;
25.图4是本实用新型第二实施例提供的外呼操控板的示意图;
26.图5是本实用新型第二实施例以三角形为例示出的内呼按键和内呼指示灯的示意
图;
27.图6是本实用新型第二实施例提供的一种梯控模块与内呼指示灯、外呼指示灯之间的连接关系图;
28.图7是本实用新型第二实施例提供的另一种梯控模块与内呼指示灯、外呼指示灯之间的连接关系图;
29.图8是本实用新型第三实施例提供的一种电梯系统的结构图;
30.图9是本实用新型第三实施例提供的另一种电梯系统的结构图。
具体实施方式
31.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
32.参照图1至图3,本实用新型第一实施例提供的电梯系统包括轿厢1、电梯控制主机2,其中,轿厢1内设置有内呼操控板11和梯控模块12,内呼操控板11上设有若干内呼按键111和若干内呼指示灯112,若干内呼按键111和若干内呼指示灯112均与梯控模块12连接。轿厢1是指电梯系统中用以承载和运送乘梯人员、乘梯机器人的箱形空间,内呼操控板11上的若干内呼按键111分别与各楼层对应,以便实现目标楼层的选定操作。电梯控制主机2位于轿厢1之外,用于控制轿厢1的运行以带动轿厢1到达机器人或乘梯人的出发/目标楼层,并通过总线与梯控模块12连接。当有内呼按键111被选定后,电梯控制主机2即可控制轿厢1运行至被选定的内呼按键111所对应的楼层。
33.当乘梯人进入轿厢1后可直接按压对应的内呼按键111来选定目标楼层,而当机器人进入轿厢1乘梯时,需要机器人将包含目标楼层在内的内呼指令以无线形式发送至电梯控制主机2,电梯控制主机2再将该内呼指令转发至梯控模块12。梯控模块12接收到该内呼指令后,从中解析出机器人目标楼层信息,并将解析出的目标楼层信息发送至电梯控制主机2。电梯控制主机2得到乘梯人或机器人的目标楼层之后,控制轿厢1运行至乘梯人或机器人的目标楼层。
34.进一步地,为方便轿厢1之内的其他乘梯人了解电梯的停靠情况,梯控模块12在解析出目标楼层信息后,控制与目标楼层对应的内呼按键111被选定。
35.若干内呼指示灯112与各内呼按键111一一对应设置,各内呼指示灯112在对应的内呼按键111被选定时点亮,内呼按键111通常设计为如图2、图3所示的圆形,也可以设计为方形或其他形状,内呼指示灯112通常为环绕内呼按键111的设计形式。
36.无论乘梯人选定的内呼按键111,还是梯控模块12为机器人选定的内呼按键111,选定之后,正常情况下内呼按键111对应的内呼指示灯112会被点亮,电梯控制主机2会控制轿厢1按照顺序依次将乘梯人或机器人运送至各自的目标楼层。但是现实中很多电梯都带有错按消号功能,以减少电梯不必要的停靠,提高电梯运行效率,例如,选定某楼层的内呼按键111之后,在电梯未到达目标楼层之前,利用再次按下该楼层的内呼按键11或再快速连按两次该楼层的内呼按键111的方式,可以取消该楼层的登记状态,使得电梯中止在该楼层的停靠计划。
37.考虑到机器人乘梯具有特殊性,一旦遭遇其他乘梯人的误消号,将直接影响配送。
因此,本实施例中,在轿厢1到达机器人的目标楼层之前,梯控模块12实时监控目标楼层的对应的内呼指示灯112的状态是否符合预置的消号条件,若符合,则将机器人的目标楼层信息再次发送至电梯控制主机2。进一步地,梯控模块12同时还会控制目标楼层对应的内呼按键111再次被选定,向其他乘梯人展示电梯的停靠情况。
38.可以看出,第一实施例提供的电梯系统通过梯控模块3检测机器人的目标楼层对应的内呼指示灯12的状态,当检测到该对应的内呼指示灯12的状态符合预置的消号条件时,将机器人的目标楼层信息再次发送至电梯控制主机2甚至控制对应的内呼按键11再次被选定,从而实现防消号功能,可保证配送机器人的正常配送。
39.上述第一实施例侧重描述机器人内呼的情况,在第一实施例的基础上,如图4、图5所示,本实用新型第二实施例提供的电梯系统进一步示出了机器人外呼的情况。具体地,本实施例的电梯系统还需包括若干外呼按键41和若干外呼指示灯42。若干外呼按键41一般布设在各楼层的电梯门的一侧,并与电梯控制主机2连接,用于在各楼层实现外呼指令的触发操作,一般包括如图4所示的上行按键和下行按键,通常设计为三角形状,用三角形的顶角指向来区分上行、下行,图4的显示区域则用于动态显示电梯当前所处的楼层。若干外呼指示灯42与各外呼按键41一一对应设置,各外呼指示灯42在对应的外呼按键41被触发时点亮,同样可以设计为环绕外呼按键41的形式。
40.当乘梯人通过外呼按键41发出外呼指令时,梯控模块12可以直接得到该外呼指令,并从中解析出乘梯人的出发楼层,并将出发楼层信息发送至电梯控制主机2。而当机器人需要乘梯时,则将包含有出发楼层信息的外呼指令发送至电梯控制主机2,电梯控制主机2将机器人的外呼指令转发至梯控模块12,梯控模块12从中解析出机器人的出发楼层信息并发送至电梯控制主机2,以便电梯控制主机2控制轿厢1到的机器人所在的楼层。进一步地,梯控模块12与若干外呼按键41连接,梯控模块12同时控制与机器人出发楼层对应的外呼按键41被选定。
41.同理,对于在外呼方面也有消号功能的电梯系统,梯控模块12也可以与外呼指示灯42连接,通过检测外呼指示灯42的状态来再次选定外呼按键41。
42.电梯的内呼指令和外呼指令决定了电梯所要停靠的楼层。对于现场有多部电梯的情况下,为方便机器人确定最适合乘坐的电梯,电梯控制主机2还用于将基于外呼指令与内呼指令得到的电梯运行状态发送至待乘梯的机器人,机器人可以根据各电梯的运行状态,确定最适合乘坐的电梯。
43.进一步地,为提高线路的绝缘性能和抗干扰性能,本实施例中在梯控模块12与内呼指示灯112之间,和/或梯控模块12与外呼指示灯42之间采用光电隔离器件进行隔离。具体地,如图6所示,梯控模块12与各内呼指示灯112之间连接有光电隔离器件,梯控模块12通过光电隔离器件采集目标楼层的内呼指示灯112的状态。同理,梯控模块12与各外呼指示灯42之间连接有光电隔离器件,梯控模块12通过光电隔离器件采集各外呼指示灯42的状态。上述光电隔离器件可以选用光电耦合器实现。
44.另外,又考虑到内呼指示灯112可能会出现故障,即使在对应的内呼按键111被选定时内呼指示灯112也还是非点亮状态,此时如果仅凭直接检测内呼指示灯本身的状态,极有可能无法真正确认对应的内呼按键111是否被消号,这样再次对内呼按键111的选定反而又会成为消号操作。因此,本实施例中,梯控模块12采集的是对内呼指示灯112的控制信号,
根据该控制信号来判断对应的内呼按键111是否被消号,无需关注内呼指示灯112是否为真实的点亮状态。具体地,在技术层面上,如图7所示,电梯系统包括内呼指示灯控制模块5,内呼指示灯控制模块5与若干内呼指示灯112一一连接,用于在有内呼按键111被选定时向对应的内呼指示灯112发送点亮指令。而对于没有被选定的内呼按键111,内呼指示灯控制模块5会发送非点亮指令,应当理解,本实施例中的非点亮指令可以指一种不同于点亮指令的具体的指令信号,也可以指无信号的指令。
45.梯控模块12连接至内呼指示灯控制模块5与各内呼指示灯12之间的线路上,当检测到在到达机器人的目标楼层之前内呼指示灯控制模块5发送至对应的内呼指示灯112的控制指令由点亮指令变为非点亮指令时,确认为对应的内呼指示灯112的状态符合预置的消号条件,可以再次将目标楼层信息转发至电梯控制主机2,甚至进行再次选定内呼按键111的控制。
46.需要说明的是,梯控模块12连接至内呼指示灯控制模块5与各内呼指示灯112之间的线路上的方式可以是图7所示的直接连接,也可以是通过图6中的光电隔离器件连接。
47.这种基于对内呼指示灯112的控制指令来判断内呼按键11有无消号的方式,不仅不会受内呼指示灯112显示性能变坏的影响(例如内呼指示灯112无法显示),而且在技术层面的实现也简单,不需要关注内呼按键111的消呈规则,仅靠区分两种信号即可。
48.综合上述各实施例,轿厢1与电梯控制主机2之间的交互通过梯控模块12实现,另外,布设在各楼层的若干外呼按键41与电梯控制主机2之间的交互也可以通过梯控模块12实现,具体可分为以下四种情况:
49.第一,乘梯人的外呼。当乘梯人通过某楼层的外呼按键41外呼时,与该外呼按键41对应的外呼指示灯42点亮,梯控模块12从外呼指令中解析出乘梯人的出发楼层,并将出发楼层信息发送至电梯控制主机2。
50.第二,机器人的外呼。机器人将包含出发楼层信息的外呼指令发送至电梯控制主机2,电梯控制主机2将该外呼指令转发至梯控模块12,梯控模块12从该外呼指令中解析出机器人的出发楼层,并将出发楼层信息发送至电梯控制主机2,同时还可以控制与出发楼层对应的外呼按键41被选定。
51.第三,乘梯人的内呼。乘梯人以选定某内呼按键111的方式发起内呼,与该内呼按键111对应的内呼指示灯112点亮,梯控模块12将内呼按键111对应的目标楼层发送至电梯控制主机2。
52.第四,机器人的内呼。机器人将包含目标楼层信息的内呼指令发送至电梯控制主机2,电梯控制主机2将该内呼指令转发至梯控模块12,梯控模块12从该内呼指令中解析出机器人的目标楼层,并将目标楼层信息发送至电梯控制主机2,同时还可以控制与目标楼层对应的内呼按键111被选定。
53.作为一种实现方式,机器人的内呼指令可以与外呼指令一同发送至电梯控制主机2,电梯控制主机2将外呼指令与内呼指令打包为乘梯指令转发至梯控模块12,梯控模块12再分别对外呼指令与内呼指令进行解析以及进行相应的控制。
54.上述各实施例侧重的是在机器人目标楼层的内呼按键111被消号时的补救措施,作为一种改进,本实用新型第三实施例在上述各实施例的基础上进一步提供的电梯系统可在一定程度上提前避免对机器人目标楼层的内呼按键111出现消号操作。现提供两种实现
方式:
55.第一种,如图8所示,每个内呼指示灯112包括与指示灯控制模块5连接的第一颜色的指示灯1121和第二颜色的指示灯1122,指示灯控制模块5与梯控模块12连接,在有内呼按键被选定时指示灯控制模块5默认是乘梯人的选定操作,会控制第一颜色的指示灯1121点亮,而梯控模块12在接收到电梯控制主机2转发的机器人内呼指令后会确认为是针对机器人的选定操作,梯控模块12根据该内呼指令通知指示灯控制模块5,指示灯控制模块5进一步将会控制第二颜色的指示灯1122点亮。
56.通过将内呼指示灯112分成两种颜色的指示灯,便于乘梯人分辨出哪个内呼按键111是针对机器人的选定操作,从而会有意识的避免误触碰而引发消号。
57.第二种,如图9所示,电梯系统还包括提醒模块6,提醒模块6与梯控模块12连接,用于在梯控模块12的控制下以预置的提醒方式提醒轿厢内1的乘梯人员勿对目标楼层的内呼按键111进行消号操作。提醒模块6具体可以选用音频提醒模块、光电提醒模块或声光结合的提醒模块。
58.例如,当梯控模块12为机器人选定某一个内呼按键111之后,会控制提醒模块6发出语音提醒“第xx楼为机器人的目标楼层,请勿触碰以免引发消号”等等,便于轿厢1内的乘梯人避免误操作。当然,也可为在机器人本体上也进行声、光方式的不断提醒,直至机器人到达目标楼层。
59.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。