1.本发明涉及康复医疗器械领域,特别涉及一种七自由度上肢助力外骨骼。
背景技术:
2.随着社会的发展,人口老龄化日益严重,脑中风、脑卒中等疾病的发病率也日益上升;对于脑中风、脑卒中以及外伤导致上肢出现运动功能障碍的患者,需要长时间的辅助医疗训练,康复医疗器械是辅助医疗训练的重要组成部分。目前的上肢康复器械大多为固定式(台车),且外形笨重,造价昂贵。不适用于患者自行在家康复治疗,患者只能在医疗机构进行康复。
3.现有少量的可穿戴式上肢助力器械,例如:专利申请号cn201510103109.2公开了一种“七自由度上肢助力外骨骼机器人”,包括腕部、手掌部和手指部,其中腕部连接手掌部,腕部包括手腕环形齿轨和设置在手腕环形齿轨上的手腕滑块,手掌部包括手掌护板,连接手指部,手指部包括大拇指板和四联指板;其主要辅助人体手部的多角度的较灵活运动,但关于人体肩部和手臂部的自由度设置非常简化,无前臂旋转自由度;此外,由于其结构设计导致其左右肢无法进行替换,患者购买成本较高;再有,其肩关节在转动过程中是绕固定轴线转动,不符合人体肩关节的屈/伸过程中的轴线变化,使得人体使用时体验感较差。
技术实现要素:
4.本发明克服了上述现有技术中所存在的不足,提供了一种七自由度上肢助力外骨骼,其包括背板、肩部、臂部、掌部,通过结构设计使得所述上臂第一转动件与肩部转动件变轴线转动连接,符合人体肩关节的屈/伸过程中的轴线变化,同时符合人体工学设计,应用在肩关节的屈/伸过程,解决了肩部大范围转动时盂肱关节整体移动时引起转动轴线变化的问题,使运动过程符合人体运动的实际情况,使用时体验感更好。此外,所述肩部、臂部、掌部组成的上肢可以穿戴在人体左侧上肢或人体右侧上肢上,实现替换功能,大大降低成本。
5.本发明的技术方案是这样实现的:一种七自由度上肢助力外骨骼,包括:背板,所述背板为穿戴者的背部提供符合人体工学的支撑;肩部,所述肩部包括肩部转动件、肩背连接转动件、肩背连接滑动件;所述肩背连接滑动件设置在背板左侧或右侧,所述肩背连接滑动件与背板可拆卸式滑动连接;所述肩背连接转动件与肩背连接滑动件转动连接,所述肩部转动件与肩背连接转动件转动连接;臂部,所述的臂部包括上臂部与小臂部,所述的上臂部包括上臂第一转动件与上臂第二转动件,所述的上臂第一转动件与肩部转动件变轴线转动连接;所述的上臂第二转动件相对于上臂第一转动件转动;所述的小臂部包括小臂第一转动件与小臂第二转动件,所述的小臂第一转动件与上臂第二转动件转动连接,小臂第二转动件相对于小臂第一转动件转动;
掌部,包括掌部第一转动件与掌部第二转动件,所述掌部第一转动件与所述小臂第二转动件连接,掌部第二转动件相对于掌部第一转动件转动;肩部、臂部、掌部组成上肢,所述肩背连接滑动件设置在背板左侧时,所述上肢穿戴于人体左侧上肢;所述肩背连接滑动件设置在背板右侧时,所述上肢穿戴于人体右侧上肢。所述的上肢既可以穿戴于人体右侧上肢,也可以穿戴于人体左侧上肢。通过调整肩背连接滑动件的位置,使其安装在背板左侧或右侧中的一侧,在具体使用更换时,只需将肩背连接滑动件在另一侧重新安装即可。
6.作为优选,所述的上臂第一转动件与肩部转动件变轴线转动连接指的是:所述肩部转动件上设有槽口,所述肩部转动件的一面设有滑轨,另一面设有齿条,所述的上臂第一转动件上设有穿过槽口的凸台;所述滑轨上设有滑动件,所述滑动件固定设有电机定子,所述的凸台上部穿过槽口后与电机转子相连,所述凸台下部设有与齿条啮合的齿轮。电机转子转动时,带动上臂第一转动件沿着肩部转动件转动,齿轮沿着齿条转动,凸台的上部在槽口内转动,电机定子随着滑动件一起沿着滑轨移动。
7.作为优选,所述肩部转动件与肩背连接转动件沿固定轴线转动连接,所述肩背连接转动件上设有电机,所述电机的转子与肩部转动件连接,所述电机的定子固定在肩背连接转动件上。
8.作为优选,所述肩部转动件与肩背连接转动件变轴线转动连接,所述肩背连接转动件上设有槽口,所述肩背连接转动件的一面设有滑轨,另一面设有齿条,所述的肩部转动件上设有穿过槽口的凸台;所述滑轨上设有滑动件,所述滑动件固定设有电机定子,所述的凸台上部穿过槽口后与电机转子相连,所述凸台下部设有与齿条啮合的齿轮。电机转子转动时,带动肩部转动件沿着肩背连接转动件转动,齿轮沿着齿条转动,凸台的上部在槽口内转动,电机定子随着滑动件一起沿着滑轨移动。
9.作为优选,所述背板包括上下设置的第一背板与第二背板,所述第一背板与第二背板的位置相对固定,所述的第一背板支撑人体上背部,所述第二背板支撑人体下背部;所述第一背板包括第一横板与第一竖板,所述第二背板包括第二横板与第二竖版,所述肩背连接滑动件与第一横板滑动连接;所述的第一横板上设有限位滚轮,所述肩背连接滑动件一端设有限位组件。所述第一背板与第二背板的位置相对固定是指:在第一竖版与第二竖版上竖直设有若干调节孔,调节孔内插入插销将第一、第二竖版的位置固定。
10.作为优选,所述上臂第一转动件、小臂第一转动件、掌部第一转动件上分别设有导轨,所述上臂第二转动件、小臂第二转动件、掌部第二转动件上对应设有滑块,所述滑块绕导轨转动;所述导轨上设有若干限位圆珠,所述上臂第二转动件、小臂第二转动件、掌部第二转动件的两端分别设有限位组件。滑块与导轨配合,使得上臂第二转动件绕着上臂第一转动件滑动,小臂第二转动件绕着小臂第一转动件滑动,掌部第二转动件绕着掌部第一转动件滑动;所述限位组件限制上臂第二转动件、小臂第二转动件、掌部第二转动件的滑动范围。
11.作为优选,所述的上臂第二转动件与小臂第一转动件之间设有上臂调节件,所述上臂调节件上设有若干调节孔,所述上臂第二转动件上对应设有若干调节孔,调节孔内插入插销将上臂调节件与上臂第二转动件位置固定;所述上臂调节件与小臂第一转动件转动连接,所述上臂调节件上设有电机,所述电机的定子固定于上臂调节件上,所述电机的转子
与所述小臂第一转动件连接;所述的小臂第二转动件与掌部第一转动件之间设有小臂调节件,所述小臂调节件与掌部第一转动件转动连接;所述小臂调节件上设有若干调节孔,所述上臂第二转动件上对应设有若干调节孔,调节孔内插入插销将小臂调节件与上臂第二转动件位置固定。
12.作为优选,所述肩背连接转动件与肩背连接滑动件通过转动结构件转动连接;所述小臂调节件与掌部第一转动件通过转动结构件转动连接。本发明中所述转动结构件优选合页。
13.作为优选,所述的背板、上臂第一转动件、小臂第一转动件、掌部第二转动件上均设有固定绑带的绑带孔。
14.作为优选,所述的齿条形状为竖直线、弧线或抛物线;所述的槽口对应形状为竖直线、弧线或抛物线。
15.作为优选,所述限位组件包括限位卡扣与限位护盖,所述限位护盖插入限位卡扣中限位。
16.作为优选,上臂第二转动件的转动角度为正负35
°
、小臂第二转动件的转动角度为正负90
°
、掌部第二转动件的转动角度为正负50
°
。
17.采用了上述技术方案的本发明的设计出发点、理念及有益效果是:(1)本发明的七自由度上肢助力外骨骼设计结构紧凑,便于穿戴,占用空间小,自身重量轻,在运动过程中贴合患者身体,不侵犯外部空间。
18.(2)其次本发明可以实现左右上肢的对称化替换,患者只需具备单个上肢的部件,即可完成双上肢康复训练。只需将肩背连接滑动件在另一侧重新安装即可。提高产品性价比,降低患者支出。
19.(3)更重要的是,在肩关节的屈/伸过程中,还可以将盂肱关节的转动轴线进行移动,实现肩关节的屈/伸过程中的轴线变化。使运动过程更贴近人体运动的实际情况,使用时体验感更好。
附图说明
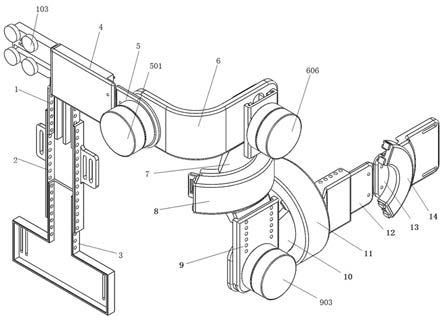
20.图1为本发明在实施例中单臂的立体结构示意图一;图2为本发明在实施例中单臂的立体结构示意图二;图3为本发明在实施例中双臂的立体结构示意图一;图4为本发明在实施例中双臂的立体结构示意图一;图5为本发明在实施例中上背板的立体结构示意图一;图6为本发明在实施例中上背板的立体结构示意图二;图7为本发明在实施例中中背板的立体结构示意图一;图8为本发明在实施例中中背板的立体结构示意图二;图9为本发明在实施例中下背板的立体结构示意图一;图10为本发明在实施例中下背板的立体结构示意图二;图11为本发明在实施例中滚轮的立体结构示意图一;图12为本发明在实施例中滚轮的立体结构示意图二;图13为本发明在实施例中肩背连接滑动件的立体结构示意图一;
图14为本发明在实施例中肩背连接滑动件的立体结构示意图二;图15为本发明在实施例中第一限位护盖或第二限位护盖或第三限位护盖或第四限位护盖的立体结构示意图;图16为本发明在实施例中肩背连接转动件的立体结构示意图;图17为本发明在实施例中肩部转动件的立体结构示意图一;图18为本发明在实施例中肩部转动件的立体结构示意图二;图19为本发明在实施例中滑块的立体结构示意图一;图20为本发明在实施例中滑块的立体结构示意图二;图21为本发明在实施例中上臂第一转动件的立体结构示意图一;图22为本发明在实施例中上臂第一转动件的立体结构示意图二;图23为本发明在实施例中上臂第二转动件的立体结构示意图一;图24为本发明在实施例中上臂第二转动件的立体结构示意图二;图25为本发明在实施例中上臂调节件的立体结构示意图一;图26为本发明在实施例中上臂调节件的立体结构示意图二;图27为本发明在实施例中小臂第一转动件的立体结构示意图一;图28为本发明在实施例中小臂第一转动件的立体结构示意图二;图29为本发明在实施例中小臂第二转动件的立体结构示意图一;图30为本发明在实施例中小臂第二转动件的立体结构示意图二;图31为本发明在实施例中小臂调节件的立体结构示意图一;图32为本发明在实施例中小臂调节件的立体结构示意图二;图33为本发明在实施例中掌部第一转动件的立体结构示意图一;图34为本发明在实施例中掌部第一转动件的立体结构示意图二;图35为本发明在实施例中掌部第二转动件的立体结构示意图一;图36为本发明在实施例中掌部第二转动件的立体结构示意图二;图37为本发明在实施例中肩部转动件与上臂第一转动件配合、且安装电机与滑块后的立体结构示意图;图38为本发明在实施例中肩部转动件与凸台配合时的局部立体结构示意图;图39为本发明在实施例中肩关节侧方变轴线转动时的立体结构示意图一;图40为本发明在实施例中肩关节侧方变轴线转动时的立体结构示意图二;图41为本发明在实施例中肩关节侧方变轴线转动时的立体结构示意图三。
21.各附图标记为:上背板1;第一横板101;第一竖版102;滚轮103;滚轮固定孔1011;第一绑带孔1012;第一调节孔1021;中背板2;第二绑带孔201;第二调节孔202;下背板3;第二横板301;第二竖版302;第三绑带孔3011;第三调节孔3021;肩背连接滑动件4;第一限位卡扣401;第一限位护盖402;第一合页403;肩背连接转动件5;第一电机501;第一电机定子固定孔502;肩部转动件6;第一电机转子固定孔601;槽口602;滑轨603;齿条604;肩部侧方滑动件605;第二电机定子固定孔6051;第二电机606;上臂第一转动件7;凸台701;第二电机转子固定孔702;第四绑带孔703;齿轮704;第一导轨705;第一限位圆珠固定孔706;上臂第二转动件8;第一滑块805;第二限位卡扣801;第二限位护盖802;第四调节孔803;上臂调节件9;第五调节孔901;第三电机定子固定孔902;第三电机903;小臂第一转动件10;第五绑带
孔1001;第三电机转子固定孔1002;第二导轨1003;第二限位圆珠固定孔1004;小臂第二转动件11;第二滑块1101;第三限位卡扣1102;第三限位护盖1103;第六调节孔1104;小臂调节件12;第七调节孔1201;第二合页1202;掌部第一转动件13;第三导轨1301;第三限位圆珠固定孔1302;掌部第二转动件14;第三滑块1401;第四限位卡扣1402;第四限位护盖1403;第六绑带孔1404。
具体实施方式
22.为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本技术的实施例及实施例中的特征可以相互组合。
23.在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
24.在本发明的描述中,术语“至少一个”指一个或一个以上,除非另有明确的限定。术语“第一”、“第二”、“第三”等仅用于描述的目的,而不能理解为指示或暗示相对重要性。
25.本发明的具体实施方式如下:实施例:本发明提供了一种七自由度上肢助力外骨骼,主要目的是助力患者进行上肢康复运动。患者通过绑带将所述外骨骼分别与患者的肩,胸,腹,上臂,前臂和手掌相固定。通过各个零部件的配合患者进行肢体运动,可以实现:1)肩关节的屈/伸(肩部转动件6和上臂第一转动件7完成);2)肩关节的内收/外展(肩背连接转动件5和肩部转动件6完成);3)上臂内旋/外旋(上臂第一转动件7和上臂第二转动件8完成);4)肘关节的屈/伸(上臂调节件9和小臂第一转动件10完成);5)小臂的旋前/旋后(小臂第一转动件10和小臂第二转动件11完成);6)腕的掌/背屈(小臂调节件12和掌部第一转动件13完成);7)腕的尺/桡屈(掌部第一转动件13和掌部第二转动件14完成);七个自由度的运动,其中肩关节的屈/伸,肩关节的内收/外展和肘关节的屈/伸可以由电机助力完成,辅助病人完成康复。电机助力也可以根据康复情况改为阻力,配合康复过程。
26.下面通过结构具体来说明:如图1
‑
4所示,一种七自由度上肢助力外骨骼,包括:背板,肩部,臂部,掌部;以及用于辅助肩关节运动,完成肩关节的部分旋转运动的第一电机501、完成肩关节的屈/伸运动的第二电机606、用于辅助肘关节运动,完成肘关节的屈/伸运动的第三电机903。
27.所述背板为穿戴者的背部提供符合人体工学的支撑;所述背板包括上背板1、中背板2、下背板3;如图5、6所示,所述上背板1放置于患者背部上方,所述上背板1包括第一横板101与第一竖版102,所述第一横板101上边缘水平放置,在第一横板101上左右对称设有滚轮固定孔1011用于固定滚轮103,所述第一横板101上水平设有第一绑带孔1012用于固定绑带。所述第一竖版102上设有第一调节孔1021可调节上背板1与中背板2的相对固定位置,从而适应患者的不同身高。
28.如图7、8所示,所述中背板2连接上背板1与下背板3,起调节长度作用,适应不同身高患者,所述中背板2的两侧设有第二绑带孔201,绑带从上背板1开始,向前方绕患者肩部并固定在中背板2上,双肩绑带可以在胸前二次固定,类似登山背包的胸前卡扣,将外骨骼固定在患者身上。所述中背板2上设有第二调节孔202,配合上背板1与下背板3调节背板长度。
29.如图9、10所示,所述下背板3放在患者背部,对应腹部高度,所述下背板3包括第二横板301与第二竖版302,所述第二横板301上设有第三绑带孔3011用于固定腹部绑带,将外骨骼固定在患者身上。所述第二竖版302上有第三调节孔3021,可以调节对应中背板2位置,从而适应不同身高患者。所述下背板3和中背板2可以也可设计为一个整体。
30.所述肩部包括肩部转动件6、肩背连接转动件5、肩背连接滑动件4,所述肩部转动件6的一端与肩背连接转动件5的一端转动连接,所述肩背连接转动件5的另一端与肩背连接滑动件4的一端通过第一合页403转动连接,所述肩背连接滑动件4与背板滑动连接。
31.如图11、12所示,所述滚轮103每侧四个一组,固定于上背板1的第一横板101上,对肩背连接滑动件4起到限位作用,使其只能水平移动。
32.如图2、13、14所示,肩背连接滑动件4用于辅助肩关节运动,完成水平方向的分解运动。相对于上背板1的第一横板101做水平运动,肩背连接滑动件4的一端设有第一限位卡扣401,第一限位护盖402插入所述第一限位卡扣401限制肩背连接滑动件4水平移动范围;所述肩背连接滑动件4的另一端装配有第一合页403。所述第一合页403连接肩背连接滑动件4和肩背连接转动件5,用于保证与其连接两者之间能够相对转动。需要说明的是,所述合页为转动结构件的一种具体实施例,也可以被两个连接件上的孔与额外的销轴代替,此时两连接件应该有对应安装孔,用于相对转动,即肩背连接滑动件4和肩背连接转动件5如有对应的孔,则可用销轴连接两者;同理于小臂调节件12和掌部第一转动件13之间使用的转动结构件。
33.如图1、2、16所示,肩背连接转动件5用于辅助肩关节运动,在肩背连接滑动件4与第一横板101的滚轮103配合下完成肩关节的部分旋转运动,例如扩胸/含胸运动等。所述肩背连接转动件5上设有第一电机定子固定孔502,用于固定第一电机501定子。
34.如图1所示,所述第一电机501的定子固定于肩背连接转动件5上,第一电机501的转子固定于肩部转动件6上,使肩部转动件6相对于肩背连接转动件5转动,从而完成肩关节的部分旋转运动,例如肩关节的外展/内收。
35.如图17、18所示,所述肩部转动件6一端设有第一电机转子固定孔601,用于连接第一电机501的转子,使肩部转动件6的整体相对于肩背连接转动件5转动。所述肩部转动件6的另一端设有槽口602,槽口602两侧的外表面设有滑轨603,内表面设有具有引导作用的齿条604。所述的齿条604可以使其他形状(弧线,抛物线等),用以精准匹配肩关节轴线变化。
36.如图19、20所示,在所述滑轨603上设有肩部侧方滑动件605,所述滑轨603可以支持肩部侧方滑动件605相对肩部转动件6滑动,所述肩部侧方滑动件605上设有第二电机定子固定孔6051用于固定第二电机606的定子。
37.所述的臂部包括上臂部与小臂部,如图21、22所示,所述的上臂部包括上臂第一转动件7、上臂第二转动件8、上臂调节件9,所述的上臂第一转动件7与肩部转动件6变轴线转动连接;所述的上臂第二转动件8相对于上臂第一转动件7转动。
38.所述上臂第一转动件7用于辅助肩关节运动,所述上臂第一转动件7上设有部分穿过槽口602的凸台701;所述的凸台701上部设有第二电机转子固定孔702,所述凸台701穿过槽口602后与第二电机606转子相连,所述凸台701下部设有与所述齿条604啮合的齿轮704;当第二电机606转子转动时,带动上臂第一转动件7转动,上臂第一转动件7转动时,齿轮704相对齿条604转动并开始移动,此时第二电机606轴线发生相对移动(与齿轮704同轴),此时肩部侧方滑动件605同步移动,从而保证第二电机606轴线与上臂第一转动件7上齿轮704的轴线同轴。所述滑轨603可以是其他形状,配合齿条604完成轴线的移动。
39.具体来说,当第二电机606转动时,可以完成肩关节的屈/伸运动。但肩关节的屈/伸运动转轴轴线是非固定的,会随着旋转角度变化而变化,因此上臂第一转动件7可以根据旋转角度的变化改变轴线的位置。所述上臂第一转动件7上还设有用于固定上臂的第四绑带孔703,通过第四绑带孔703将上臂第一转动件7绑在患者上臂上半部分。
40.所述上臂第一转动件7下部设有第一导轨705,所述第一导轨705用于支持上臂第二转动件8相对上臂第一转动件7转动,所述第一导轨705上设有第一限位圆珠固定孔706。
41.如图23、24所示,所述上臂第二转动件8相对于上臂第一转动件7进行旋转,辅助上臂完成内旋/外旋动作。所述上臂第二转动件8上设有第一滑块805配合上臂第一转动件7的第一导轨705,可以使上臂第二转动件8绕上臂第一转动件7进行旋转。所述上臂第二转动件8的两端设有第二限位卡扣801,第二限位护盖802插入所述第二限位卡扣801中,与限位圆珠配合限制上臂第二转动件8的旋转角度,本实施例中上臂第二转动件8的旋转角度为正负35
°
。所述上臂第二转动件8上还设有第四调节孔803可配合上臂调节件9针对不同患者上臂长度进行调节。
42.如图25、26所示,所述上臂调节件9上设有第五调节孔901,可通过第五调节孔901,配合上臂第二转动件8的第四调节孔803,调节上臂配合长度,适用不同患者。所述上臂调节件9上设有第三电机定子固定孔902。
43.如图27、28所示,所述的小臂部包括小臂第一转动件10、小臂第二转动件11、小臂调节件12,所述的小臂第一转动件10相对于上臂第二转动件8转动,小臂第二转动件11相对于小臂第一转动件10旋转。
44.所述小臂第一转动件10用于辅助肘关节运动,所述小臂第一转动件10上设有第五绑带孔1001,通过第五绑带孔1001将小臂第一转动件10绑在患者小臂上。所述小臂第一转动件10的上部对应肘关节部分设有第三电机转子固定孔1002。所述小臂第一转动件10上还有第二导轨1003,用于支持小臂第二转动件11相对其转动,所述第二导轨1003上有第二限位圆珠固定孔1004。
45.所述第三电机903的定子固定在上臂调节件9上,第三电机903的转子连接小臂第一转动件10,当第三电机903转动时,可以完成肘关节的屈/伸运动。。
46.如图29、30所示,所述小臂第二转动件11相对于小臂第一转动件10进行旋转,辅助小臂完成旋前/旋后动作。所述小臂第二转动件11上设有第二滑块1101配合小臂第一转动件10的第二导轨1003可以使小臂第二转动件11绕小臂第一转动件10进行旋转。所述小臂第二转动件11的两端设有第三限位卡扣1102,第三限位护盖1103插入所述第三限位卡扣1102中,与限位圆珠配合限制小臂第二转动件11的旋转角度,本实施例中所述小臂第二转动件11的旋转角度为正负90
°
。所述小臂第二转动件11上还设有第六调节孔1104可配合小臂调
节件12针对不同患者小臂长度进行调节。
47.如图31、32所示,所述的小臂调节件12上设有第七调节孔1201,可通过第七调节孔1201,配合小臂第二转动件11的第六调节孔1104,调节小臂配合长度,适用不同患者。
48.所述小臂调节件12上装配有第二合页1202,通过第二合页1202将小臂调节件12与掌部第一转动件13相连接。所述第一合页403、第二合页1202均用于保证与其连接两者之间能够相对转动。
49.如图33、34所示,掌部包括掌部第一转动件13与掌部第二转动件14,掌部第二转动件14相对于掌部第一转动件13转动。
50.所述掌部第一转动件13用于辅助腕关节运动,通过小臂调节件12、掌部第一转动件13与第二合页1202,可以完成腕关节的掌/背屈运动。掌部第一转动件13上还设有第三导轨1301,用于支持掌部第二转动件14相对其转动,所述第三导轨1301上有第三限位圆珠固定孔1302。
51.如图35、36所示,所述掌部第二转动件14相对于掌部第一转动件13进行旋转,辅助腕关节完成尺/桡屈动作。所述掌部第二转动件14上有第三滑块1401配合掌部第一转动件13的第三导轨1301可以使掌部第二转动件14绕腕关节进行旋转。所述掌部第二转动件14的两端设有第四限位卡扣1402,所述第四限位护盖1403插入第四限位卡扣1402中,与限位圆珠配合限制掌部第二转动件14的旋转角度,本实施例中所述掌部第二转动件14的旋转角度为正负50
°
。所述掌部第二转动件14上还设有第六绑带孔1404可以将掌部第二转动件14固定在患者的手掌处。
52.如图5所示,为第一限位护盖402、第二限位护盖802、第三限位护盖1103或第四限位护盖1403的结构示意图,所示护盖与卡扣配合起限位作用,也可用其他方式代替。
53.用于外骨骼的变轴线转动装置,包括第一连接件、第二连接件、电机;所述的第一连接件上开设有槽口,所述第一连接件的一面设有滑轨,另一面设有齿条;所述的第二连接件上设有穿过槽口的凸台;所述滑轨上设有滑动件,所述滑动件固定电机定子,所述的凸台上部穿过槽口后与电机转子相连,所述凸台下部设有与齿条啮合的齿轮。
54.如图37所示,所述第一连接件在本图中为肩部转动件6,所述第二连接件在本图中为上臂第一转动件7;图37为本发明在实施例中肩部转动件6与上臂第一转动件7、第二电机606与肩部侧方滑动件605配合后的立体结构示意图,为用于外骨骼的变轴线转动装置的实施方式之一。此外所述装置还可以应用在肩的内收/外展运动过程中,也可以应用在腕的尺/桡屈运动过程中,原理均相同。
55.如图38所示中,在电机转动时,所述齿轮704与齿条604啮合,并且沿着所述槽口602移动。
56.如图39所示,为肩关节侧方变轴线转动时的立体结构示意图,此时人体上臂为自然下垂时的状态,凸台701处于槽口602的底端,齿轮704处于齿条604的下端;当人体手臂向侧方举起直至举平后,所述肩部转动件6与上臂第一转动件7的关系为图40所示,此时凸台701处于槽口602中部,齿轮704处于齿条604中部;当人体手臂继续向侧方举高直至与肩部垂直,此时肩部转动件6与上臂第一转动件7的关系为图41所示,此时凸台701处于槽口602上端,齿轮704处于齿条604上端。
57.综上所述,本发明实现在肩关节的屈/伸过程中,将盂肱关节的转动轴线进行移
动,实现肩关节的屈/伸过程中的轴线变化。使运动过程更贴近人体运动的实际情况。此方法同样可以运用在肩关节的内收/外展运动过程中,也可以运用在腕的尺/桡屈运动过程中,上述两种关节运动轴线也是变化的。此外,运动轴线变化的轨迹可以不是直线,可以弧线,曲线等,可以改变齿条604及槽口602形状(肩部转动件6)和配合导轨的形状(肩部转动件6和肩部侧方滑动件),从而改变配合的轴线变化轨迹。
58.所述肩部、臂部、掌部组成上肢,如图1
‑
4所示,所述的上肢既可以穿戴于人体右侧上肢,也可以穿戴于人体左侧上肢。在实际应用中,通过调换肩背连接滑动件4的位置,使其安装在背板左侧或右侧中的一侧;为实现对称化替换,第一电机501、第二电机606、第三电机903的转动角度范围需要根据装配位置(左/右)进行重新设定,但由于各个转动件的转动范围都是中心对称,所以左右上肢对称替换之后,各个关节的活动范围完全一致。且当左右上肢对称替换之后,由于肩部转动件6上的齿条604和上臂第一转动件7上的齿轮704与原位置呈镜像状态,因此替换之后具有同样的轴线变化轨迹和功能。
59.具体操作方式为:(1)将第一限位护盖402从所述第一限位卡扣401拔出,水平移动所述肩背连接滑动件4,使得其从第一横板101的一端水平移出;(2)将肩背连接滑动件4在第一横板101的另一端水平滑入,再将第一限位护盖402插入到所述第一限位卡扣401中;(3)根据装配位置左/右,对第一电机501、第二电机606、第三电机903转动角度重新设定即可。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。