具有释放机构的踏板组件
相关申请的交叉引用
1.本技术要求于2019年4月23日提交的美国临时申请62/837,467的优先权,其内容通过引用包括在本文中。
技术领域
2.本说明书总体上涉及踏板组件,并且更具体地,涉及在碰撞期间具有释放组件特征件的踏板组件。
背景技术:
3.在交通工具的前端部碰撞期间,交通工具的动量将驾驶员朝向交通工具的前部投射。这将迫使驾驶员的腿和脚用大的力进入踏板垫。因此,将期望生产一种远离驾驶员的腿和脚释放踏板的踏板组件。
技术实现要素:
4.在一个实施方式中,提供踏板组件。踏板组件包括壳体、踏板臂、保持构件和块体。踏板臂具有上端部,所述上端部枢转地耦合到壳体。保持构件可滑动地接合在壳体内。保持构件具有第一成角度部分。保持构件的一部分与踏板臂的上端部连通。所述块体可滑动地安装在所述壳体内,并且垂直于所述保持构件的所述第一成角度部分。所述块体具有第二成角度部分,所述第二成角度部分与所述第一成角度部分互补。在受到碰撞时,块体的第二成角度部分与第一成角度部分可滑动地接合,这导致保持构件移动并且从壳体释放踏板臂的上端部。
5.在另一个实施方式中,提供一种具有碰撞特征件的踏板组件。踏板组件包括壳体、踏板臂、保持构件和块体。壳体具有狭槽、空腔和通道。踏板臂具有上端部,所述上端部在通道内枢转地耦合到壳体。保持构件与狭槽可滑动地接合并且至少部分地定位在壳体内。保持构件具有第一成角度部分。保持构件与踏板臂的上端部连通。所述块体可滑动地安装在壳体的空腔内,并且垂直于保持构件定位。所述块体具有第二成角度部分,所述第二成角度部分与所述第一成角度部分互补。在受到碰撞时,块体的第二成角度部分与第一成角度部分可滑动地接合,这导致保持构件在狭槽内移动,并且从壳体的通道释放踏板臂的上端部。
6.鉴于以下结合附图的具体实施方式,将更全面地理解由本文所描述的实施方式提供的这些和另外的特征。
附图说明
7.附图中阐述的实施方式本质上是说明性和示例性的,并且不意图限制权利要求所限定的主题。当结合以下附图阅读时,可以理解说明性实施方式的以下具体实施方式,其中相同的结构用相同的附图标记指示,并且在附图中:
8.图1示意性地描绘了根据本文示出和描述的一个或多个实施方式的第一示例踏板
组件的透视图;
9.图2示意性地描绘了根据本文示出和描述的一个或多个实施方式的图1的第一示例踏板组件的分解图;
10.图3示意性地描绘了根据本文示出和描述的一个或多个实施方式的沿着线3
‑
3截取的图1的第一示例踏板组件的局部横截面视图;
11.图4示意性地描绘了根据本文示出和描述的一个或多个实施方式的图3的第一示例踏板组件的衬套和突出部的独立横截面视图;
12.图5示意性地描绘了根据本文示出和描述的一个或多个实施方式的沿着线5
‑
5截取的图1的第一示例踏板组件的保持构件的第一成角度部段和块体的第二成角度部段的局部横截面视图;
13.图6示意性地描绘了根据本文示出和描述的一个或多个实施方式的第二示例踏板组件的前部和侧面的透视图;
14.图7示意性地描绘了根据本文示出和描述的一个或多个实施方式的图6的第二示例踏板组件的前部和另一侧的透视图;
15.图8示意性地描绘了根据本文示出和描述的一个或多个实施方式的图6的第二示例踏板组件的局部分解图;
16.图9示意性地描绘了根据本文示出和描述的一个或多个实施方式的沿着线a
‑
a截取的处于操作位置的图6的第二示例踏板组件的局部横截面视图;
17.图10示意性地描绘了根据本文示出和描述的一个或多个实施方式的沿着线a
‑
a截取的处于脱离位置的图6的第二示例踏板组件的局部横截面视图;
18.图11示意性地描绘了根据本文示出和描述的一个或多个实施方式的第三示例踏板组件的前部和侧面的透视图;
19.图12示意性地描绘了根据本文示出和描述的一个或多个实施方式的图10的第三示例踏板组件的前部和另一侧的透视图;
20.图13示意性地描绘了根据本文示出和描述的一个或多个实施方式的图10的第三示例踏板组件的局部分解图;
21.图14示意性地描绘了根据本文示出和描述的一个或多个实施方式的沿着线b
‑
b截取的处于操作位置的图11的第三示例踏板组件的局部横截面视图;以及
22.图15示意性地描绘了根据本文示出和描述的一个或多个实施方式的沿着线b
‑
b截取的处于脱离位置的图11的第三示例踏板组件的局部横截面视图。
具体实施方式
23.本公开的各实施方式涉及具有释放机构的踏板组件,所述释放机构具有多个部件,所述多个部件将踏板臂的上部从壳体机械地脱离,以允许踏板臂的上部在交通工具碰撞时枢转离开壳体。因此,踏板臂从操作位置移动到脱离位置,其中操作位置是踏板臂的正常位置,并且脱离位置是在交通工具碰撞期间踏板臂从不期望位置移动到期望位置的位置。在一些实施方式中,碰撞期间的期望位置可在壳体之外并且在交通工具的地板上。
24.释放机构包括保持构件、块体和一对衬套。保持构件包括基部部分、由基部部分间隔开的第一腿部和第二腿部。基部部分包括第一成角度表面。保持构件枢转地接合在壳体
内,并且第一腿部和第二腿部经由一对衬套与踏板臂的上端部连通。所述块体可滑动地安装在壳体内。所述块体包括第二成角度部分,所述第二成角度部分与第一成角度部分互补。在交通工具碰撞时,块体的第二成角度部分与第一成角度部分可滑动地接合,这导致构件的第一腿部和第二腿部枢转和/或凸轮驱动(cam),并且从壳体释放一对衬套和踏板臂的上端部。因此,在交通工具碰撞期间,踏板臂的上部从不期望位置移动到期望位置。
25.踏板组件可以是电传操纵式、风琴踏板式、加速踏板组件、组合踏板组件、可调整踏板组件等。本文将更详细地描述踏板组件的各种实施方式和踏板组件的操作。
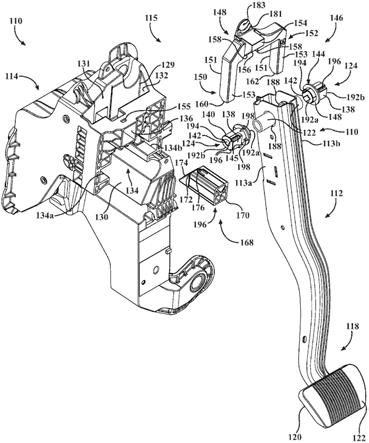
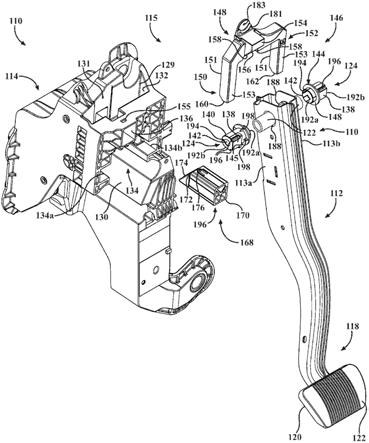
26.现在参考图1至图5,示意性地描绘了第一示例踏板组件10。第一示例踏板组件10包括踏板臂12、壳体14和释放机构15。释放机构15包括一对衬套24、保持构件46和块体68,如本文进一步详细描述的。
27.踏板臂12包括上部16和相对的下部18。踏板垫20耦合到下部18。踏板垫20具有适于接纳驾驶员的脚的细长的顶部表面21。上部16与壳体14连通。在一些实施方式中,踏板臂12的上部16相对于壳体14充当活动铰链,使得当力(诸如由驾驶员的脚/腿导致的力)施加在踏板垫20上时,上部16相对于壳体14枢转。在一些实施方式中,踏板臂12的上部16包括一对突出部22,所述一对突出部22从踏板臂12的每个侧表面13a、13b延伸。在其他实施方式中,踏板臂12的上部16包括在踏板臂12的每个侧表面13a、13b内的一对凹部。在一些实施方式中,踏板臂12由金属材料(诸如铝合金、钛、碳纤维、铬钢等)制成。在其他实施方式中,踏板臂12由聚合物基复合材料制成。应理解,踏板臂12可以是交通工具的制动踏板、离合器踏板、加速踏板和/或任何类型的交通工具中可能涉及碰撞的任何其他踏板。
28.壳体14包括后壁26a、相对的前壁26b、在后壁26a和前壁26b之间延伸的一对侧壁26c、26d以及上表面28。在一些实施方式中,上表面28是敞开的顶部表面。也就是说,上表面28不具有平面的壁表面。在一些实施方式中,后壁26a和/或上表面28的部分被配置为耦合到交通工具,诸如耦合到防火墙的一部分和/或仪表板的一部分。前壁26b包括细长的凹口30,所述细长的凹口30大体上延伸到上表面28的长度,使得适应踏板臂12的行程。后壁26a包括狭槽32,所述狭槽32通常在一对侧壁26c、26d之间并且朝向前壁26b在横向上延伸。壳体的上表面28包括通道34,所述通道34延伸穿过上表面28并且在所述一对侧壁26c、26d之间。在一些实施方式中,通道34是一对分开的通道。上表面28还包括空腔36,所述空腔36在竖直方向上定位在狭槽32上方。因此,空腔36邻近后壁26a定位。在一些实施方式中,通道34和/或空腔36在垂直于狭槽32延伸方向的方向上延伸。
29.在一些实施方式中,壳体14可以是模制的塑料材料,诸如玻璃增强聚丙烯。在其他实施方式中,壳体14可以是热塑性塑料,诸如聚丙烯、abs、聚甲醛、聚碳酸酯、尼龙、聚合物,诸如pvc、丙烯酸(pmma)、聚醚醚酮(peek)、聚苯乙烯、其组合等。
30.在一些实施方式中,踏板臂12的上部16经由所述一对衬套24枢转地附接到壳体14,所述一对衬套24独立于壳体14并附接到所述一对突出部22。所述一对衬套24各自包括形成孔42的上表面38和下表面40。在一些实施方式中,上表面38是平面的,并且下表面40是半圆形的。在其他实施方式中,上表面38可以是弓形的,并且下表面40可以是其他形状,诸如六边形、三角形、矩形等。此外,所述一对衬套24中的每一个都可以包括凸缘部分44,所述凸缘部分44延伸超过上表面38和下表面40。在一些实施方式中,凸缘部分44的内表面45与踏板臂12的每个侧表面13a、13b连通。
31.在一些实施方式中,当第一示例踏板组件10处于操作位置时,一对衬套24和一对突出部22定位在通道34内,如图1最佳所示。也就是说,所述一对衬套24的下表面40的一部分和凸缘部分44的一部分定位成与通道34连通,以限制或保持所述一对衬套24在通道34内静止,并且准许所述一对突出部22在所述一对衬套24的孔42内旋转。因此,踏板臂12可以行进细长凹口30的长度,使得踏板臂12在操作期间在壳体14内枢转。在一些实施方式中,所述一对衬套24键接在凸缘部分44处或邻近凸缘部分44键接,以防止所述一对衬套在通道34内旋转和/或在通道34中被束缚。
32.在一些实施方式中,一对衬套24中的每一个衬套都可以是模制的塑料材料,诸如hostraform材料。在其他实施方式中,一对衬套24中的每一个衬套都可以是热塑性塑料,诸如聚甲醛(pom)(也称为缩醛)、聚丙烯、abs、聚甲醛、聚碳酸酯、尼龙、聚合物,诸如pvc、丙烯酸(pmma)、聚醚醚酮(peek)、聚苯乙烯、其组合等。
33.第一示例踏板组件10还包括保持构件46,所述保持构件46可滑动地接合在壳体14的狭槽32内。在一些实施方式中,保持构件46通常是“u”形或叉形。在此实施方式中,保持构件46包括基部部分48,所述基部部分48将第一腿部50与第二腿部52分开或间隔开。基部部分48包括具有第一成角度部分56或第一斜坡的上表面54。此外,第一成角度部分56凹入基部部分48的上表面54内,使得第一成角度部分56定位成形成一对成角度壁58。在一些实施方式中,所述一对成角度的壁58可用作导向件,如本文更详细讨论的。
34.在一些实施方式中,第一腿部50和第二腿部52在定位在壳体14内时,从后壁28a朝向前壁28b延伸,使得第一腿部50和第二腿部52中的每一个的至少远侧端部60、62定位在通道34内。应理解,在操作位置,第一腿部50和第二腿部52中的每一个的远侧端部60、62与所述一对衬套24中的每个相应的衬套的上表面38连通。也就是说,第一腿部50和第二腿部52中的每一个都包括限定厚度的内表面51和外表面53。在一些实施方式中,第一腿部50和第二腿部52的外表面53包括凹口49。在其他实施方式中,第一腿部50和第二腿部52的外表面53是平面的。
35.在操作位置,第一腿部50和第二腿部52中的每一个的至少远侧端部60、62将所述一对衬套24保持在壳体14的通道34中。也就是说,在操作位置,第一腿部50和第二腿部52中的每一个的远侧端部60、62的至少内表面51搁置在所述一对衬套24中的每个相应的衬套的上表面38上。此布置将一对衬套24和踏板臂12的上部16保持在壳体14的通道34内,同时准许踏板臂12在操作期间沿着细长凹口30的长度枢转。在一些实施方式中,第一腿部50和第二腿部52的每个外表面53具有邻近第一腿部50和第二腿部52中的每个的远侧端部60、62的凹入64。
36.在其他实施方式中,保持构件46包括一对分开的腿部,所述一对分开的腿部独立地保持所述一对衬套24的相应衬套。在此实施方式中,基部部分可以独立地与一对分开的腿部连通。
37.第一示例踏板组件10还包括块体68,所述块体68可滑动地接纳在壳体14的空腔36内。也就是说,块体68的尺寸成形为接纳在壳体14的空腔36中。块体68包括第一端部70和相对的第二端部72。当第一示例踏板组件10处于操作位置时,块体68的第一端部70在竖直方向上延伸到壳体14的上表面28上方。此外,第一端部70被配置为接纳碰撞以压下壳体14的空腔36内的块体68。因此,第一端部可以用蜂巢状结构加强,以防止变形和/或其他应力改
变或修改块体68。在一些实施方式中,第一端部70比第二端部72具有更大的表面积,使得有更大的碰撞目标。此外,应当理解,第一端部70可以是任何均匀的形状,诸如矩形、三角形、六边形、八边形等,和/或任何不规则的形状。
38.在一些实施方式中,块体68可以是模制的塑料材料,诸如塑料材料、树脂材料等。在其他实施方式中,块体68可以是热塑性塑料,诸如聚丙烯、abs、聚甲醛、聚碳酸酯、尼龙、聚合物,诸如pvc、丙烯酸(pmma)、聚醚醚酮(peek)、聚苯乙烯、其组合等。在其他实施方式中,块体68可以是金属,诸如钢、铝、铁等。因此,在一些实施方式中,应理解,块体68可以吸收碰撞并且将所述力传送到保持构件46上,如本文更详细讨论的。在其他实施方式中,块体68可以将碰撞力传送到保持构件46上。
39.此外,第一端部70可以定位在交通工具的仪表板189(图9)内,使得在交通工具碰撞时,仪表板或其一部分与块体68的第一端部70接触。在一些实施方式中,标志191(图10)可以与块体68的第一端部70接触,以将块体68压入壳体14的空腔36内。
40.第二端部72包括第二成角度部分74。第二成角度部分74与第一成角度部分56互补,如图5最佳所示。因此,应理解,块体68的第二端部72可以垂直于保持构件46安装,使得第二成角度部分74在竖直方向上直接定位在第一成角度部分56上方,以便将第一成角度部分56与第二成角度部分74对准。应当理解,第一成角度部分56和第二成角度部分74的角度是通过块体68和保持构件46的行程来计算的。在非限制性示例中,第一成角度部分56可以成45度角并且第二成角度部分74可以成45度角。因此,在此示例中,彼此可滑动地接合的第一成角度部分56和第二成角度部分74的骑乘表面或互补表面为45度。
41.因此,块体68和保持构件46可以具有互补的45度成角度表面。然而,应理解,第一成角度部分56和第二成角度部分74(即,骑乘表面或互补成角度表面)的角度可以大于或小于45度。还应理解,在操作位置,块体68和保持构件46分别地定位在壳体14的狭槽32和空腔36内。第一成角度表面56和第二成角度表面74的一部分彼此接触,使得块体68定位成垂直于保持构件46。成角度的壁58和空腔36在块体68上形成四向保持。此外,保持构件46和块体68两者都具有保持凸片76,所述保持凸片76定位在第一端部70和第二端部72之间,以防止块体68在施加将在交通工具碰撞期间发生的适当高的力之前退出壳体14,如本文更详细讨论的。
42.当压下块体68的第一端部70时,第二成角度部分74沿着由成角度壁58引导的第一成角度部分56骑乘,以枢转或凸轮驱动保持构件46远离一对衬套24的上表面38,这允许一对衬套24和踏板臂12的上部16枢转离开通道34进入脱离位置。也就是说,在块体68的第一端部70碰撞时,第二端部72的第二成角度部分74与保持构件46的第一成角度部分56可滑动地接合,这导致保持构件46在狭槽32内枢转和/或凸轮驱动,并且从壳体14的通道34释放一对衬套24和踏板臂12的上部16。在一些实施方式中,保持构件46的枢转或凸轮驱动导致第一腿部50和第二腿部52移位,使得第一腿部50和第二腿部52移位,使得当驾驶员继续在踏板臂12的踏板垫20上施加力时,通道34内的一对衬套24和踏板臂12的上部16被释放。
43.现在参考图6至图10,示意性地描绘了第二示例踏板组件110。应理解,除了本文所描述的特征之外,第二示例踏板组件110类似于第一示例踏板组件10。因此,相似的特征将使用相同的附图标记,所述相同的附图标记带有前缀“1”。因此,出于简洁的原因,将不再描述这些特征。
44.第二示例踏板组件110是固定组合踏板组件,其包括第一踏板臂112、壳体114、释放机构115和第二踏板臂180。在一些实施方式中,第一踏板臂112可以是制动踏板并且第二踏板臂180可以是加速踏板。应理解,这是非限制性示例,并且第一踏板臂112可以是离合器踏板,并且第二踏板臂180可以是制动踏板等。第二踏板臂180包括上部182和相对的下部184。踏板垫186耦合到下部184。踏板垫186具有适于接纳驾驶员的脚的细长的顶部表面187。上部182与壳体114连通。在一些实施方式中,第二踏板臂180的上部182相对于壳体114充当活动铰链,使得当力(诸如由驾驶员的脚/腿导致的力)施加在踏板垫186上时,上部182相对于壳体114枢转。
45.在一些实施方式中,第一踏板臂112的上部116包括一对突出部122,所述一对突出部122从第一踏板臂112的每个侧表面113a、113b延伸。在其他实施方式中,第一踏板臂112的上部116包括一对凹部288(图13),所述一对凹部288定位在第一踏板臂112的每个侧表面113a、113b内。
46.壳体114包括后壁126a、相对的前壁126b、在后壁126a和前壁126b之间延伸的一对侧壁126c、126d以及上表面128。应理解,壁126a、126b、126c、126d和上表面128的描述可以通过不必对应于壁126a、126b、126c、126d和上表面128的实际定位和位置的名称来引用。例如,上表面128实际上可以取向为前壁,后壁126a可以取向为顶部表面或顶壁等等。因此,壁126a、126b、126c、126d和上表面128的描述是非限制性的。
47.在此实施方式中,上表面128是平表面壁,并且前壁126b是敞开的顶部表面。也就是说,前壁126b不具有平面的壁表面。在一些实施方式中,后壁126a和上表面128的部分被配置为耦合到交通工具,诸如耦合到防火墙的一部分和/或仪表板的一部分。前壁126b包括细长的凹口130,所述细长的凹口130大体上延伸到上表面128的长度,使得适应第一踏板臂112的行程。上表面128包括突出构件129,所述突出构件129从上表面128延伸。突出构件129包括开口131和狭槽132,所述狭槽132通常竖直延伸(即,平行于第一踏板臂112的上部116)并且在一对侧壁126c、126d之间在横向方向上延伸。壳体114的前壁126b包括通道134,所述通道134延伸穿过前壁126b并且在一对侧壁126c、126d之间,并且从前壁126b朝向后壁126a延伸。在一些实施方式中,通道134是一对分开的通道134a、134b。前壁126b还包括空腔136,所述空腔136在纵向方向上垂直于狭槽132定位。因此,空腔136从前壁126b朝向后壁126a延伸,并且空腔136被布置成使得空腔136在竖直方向上定位在狭槽132的上表面190的至少一部分的下方,并且在竖直方向上定位在通道134的上方。在一些实施方式中,空腔136和/或通道134在垂直于狭槽132延伸方向的方向上延伸。
48.在一些实施方式中,第一踏板臂112的上部116经由一对衬套124枢转地附接到壳体114,所述一对衬套124独立于壳体114并耦合到一对突出部122。所述一对衬套124各自包括内侧端部192a和相对的外侧端部192b、上表面138和下表面140,所述上表面138和下表面140形成在内侧端部192a和外侧端部192b之间延伸的孔142。在一些实施方式中,上表面138是平面的,并且下表面140是半圆形的。在其他实施方式中,上表面138可以是弓形的,并且下表面140可以是其他形状,诸如六边形、三角形、矩形等。此外,在一些实施方式中,上表面138不延伸下表面140的长度,使得形成一对耳部196或切口。在一些实施方式中,所述一对衬套124还包括在凸缘部分144处或邻近凸缘部分144的多个突出部198。所述一对衬套196和/或多个键198用作防止所述一对衬套124在通道134内旋转和/或在通道134内被束缚的
键。
49.在一些实施方式中,所述一对衬套124被分离194,使得下表面140被分成两个半月形。此外,所述一对衬套124中的每一个衬套都可以包括凸缘部分144,所述凸缘部分144延伸超过上表面138和下表面140,并且定位在内侧端部192a和外侧端部192b之间。在一些实施方式中,凸缘部分144的内表面145和内侧端部192a分别地与第一踏板臂112的每个侧表面113a、113b连通。在其他实施方式中,凸缘部分144的内表面145和内侧端部192a分别地与第一踏板臂112的每个侧表面113a、113b间隔开。
50.在一些实施方式中,所述一对衬套124与所述一对突出部122可滑动地接合,使得相应的一对衬套124的孔142接纳所述一对突出部122的相应突出部。当第二示例踏板组件110处于操作位置时,一对衬套124和一对突出部122定位在通道134内,如图6最佳所示。也就是说,所述一对衬套124的下表面140的一部分和凸缘部分144的一部分定位成与通道134连通,以限制或保持所述一对衬套124在通道134内静止,并且准许所述一对突出部122围绕所述一对衬套124的内侧端部192a旋转。因此,第一踏板臂112可以行进细长凹口130的长度,使得第一踏板臂112在操作期间在壳体114内枢转。
51.第二示例踏板组件110还包括保持构件146,所述保持构件146可滑动地接合在壳体114的狭槽132内。在此实施方式中,基部部分148包括凸缘181。凸缘181包括为紧固件185配置的孔183。在一些实施方式中,紧固件185可以是铆钉、螺栓、螺钉等。此外,紧固件185可基于剪切力来确定,如本文更详细讨论的。在操作位置,孔183与开口131对准,使得紧固件185延伸穿过孔183到开口131中。在其他实施方式中,凸缘181是凸片,其将保持构件146临时附接到突出构件129,使得在受到碰撞时,凸片断开保持构件146到突出构件129的连接。
52.在一些实施方式中,第一腿部150和第二腿部152在定位在壳体114的狭槽132内时从上表面128竖直延伸。因此,第一腿部150和第二腿部152中的每一个的至少远侧端部160、162定位在通道134内。在一些实施方式中,远侧端部160、162是锥形的。应理解,在操作位置,第一腿部150和第二腿部152中的每一个的远侧端部160、162与所述一对衬套124中的每个相应的衬套的上表面138连通。也就是说,第一腿部150和第二腿部152中的每一个都包括内表面151和外表面153,内表面151和外表面153限定将一对衬套124保持在壳体114的通道134中的厚度,同时允许第一踏板臂112围绕内侧端部192a旋转。因此,在操作位置,第一腿部150和第二腿部152中的每一个的远侧端部160、162的至少内表面151搁置在所述一对衬套124中的每个相应的衬套的上表面138上。此布置将一对衬套124和第一踏板臂112的上表面118保持在壳体114的通道134内,同时准许第一踏板臂112在操作期间沿着细长凹口130的长度枢转。
53.第二示例踏板组件110的块体168接纳在空腔136中,使得当第二示例踏板组件110处于操作位置时,块体168的第一端部170从前壁126b在纵向方向上向外延伸。此外,第一端部170被配置为接纳碰撞以压下壳体114的空腔136内的块体168。因此,第一端部170可以定位在交通工具的仪表板189内,使得在交通工具碰撞时,仪表板189或其一部分与块体168的第一端部170接触。在一些实施方式中,标志191可以与块体168的第一端部170接触,以将块体168压入壳体114的空腔136内。
54.第二端部172包括第二成角度部分174,所述第二成角度部分174垂直于保持构件146安装,使得第二成角度部分174在竖直方向上定位在第一成角度部分156的正下方,以便
将第一成角度部分156与第二成角度部分174对准。在一些实施方式中,块体168具有保持凸片176,所述保持凸片176定位在第一端部170和第二端部172之间,以防止块体168在施加将在交通工具碰撞期间发生的适当高的力之前退出壳体114,如本文更详细讨论的。在一些实施方式中,上表面128还包括孔155,所述孔155被配置为接纳保持凸片176,以防止块体168在碰撞第一端部170之前移动,如本文更详细讨论的。
55.当块体168的第一端部170在箭头a1的方向上(即,在前/后方向和/或纵向方向上)下压时,第二成角度部分174沿着由导向壁158引导的第一成角度部分156骑乘(ride)或行进,以在方向a2上(即,在上/下方向和/或竖直方向上)枢转、凸轮驱动和/或移动保持构件146,使得紧固件185被剪切,从而允许第一腿部150和第二腿部152在箭头a2的方向上(即,在上/下方向和/或竖直方向上)凸轮驱动、移动或行进。因此,第一腿部150和第二腿部152移动离开通道134并且远离所述一对衬套124的上表面138,这允许所述一对衬套124和第一踏板臂112的上部116在通道134内在箭头a3的方向上(即,在前/后方向和/或纵向方向上)移动或行进,如图10中所示。当踏板垫120在箭头a4的方向上(即,在前/后方向和/或纵向方向上)持续受压时,第一踏板臂112的上部116枢转、移动和/或行进离开通道134,使得第一踏板臂112移动到脱离位置。也就是说,当标志191和/或仪表板189碰撞块体168的第一端部170时,第二端部172的第二成角度部分174与保持构件146的第一成角度部分156可滑动地接合,这导致保持构件146在狭槽132内枢转、凸轮驱动和/或行进,剪切紧固件178并且从壳体114的通道134释放一对衬套124和第一踏板臂112的上部116。在非限制性示例中,剪切紧固件178所需的力在热条件下为1,500牛顿,并且在冷条件下为2,000牛顿。应理解,这仅是一个示例,根据系统可能需要更多或更少的牛顿。
56.现在参考图11至图15,示意性地描绘了第三示例踏板组件210。应理解,除了本文所描述的特征之外,第三示例踏板组件210类似于第二示例踏板组件110。因此,相似的特征将使用相同的附图标记,所述相同的附图标记带有前缀“2”。因此,出于简洁的原因,将不再描述这些特征。
57.第三示例踏板组件210是可调整的组合踏板组件,其包括第一踏板臂212、壳体214、释放机构215、第二踏板臂280和驱动组件202。在一些实施方式中,第一踏板臂212可以是制动踏板并且第二踏板臂280可以是加速踏板。应理解,这是非限制性示例,并且第一踏板臂212可以是离合器踏板,并且第二踏板臂280可以是制动踏板等。第二踏板臂280包括上部282和相对的下部284。踏板垫286耦合到下部284。踏板垫286具有适于接纳驾驶员的脚的细长的顶部表面287。上部282与壳体214连通。在一些实施方式中,第二踏板臂280的上部282相对于壳体214充当活动铰链,使得当力(诸如由驾驶员的脚/腿导致的力)施加在踏板垫286上时,上部282相对于壳体214枢转。
58.驱动组件202准许第一踏板臂212和/或第二踏板臂280相对于交通工具地板和/或防火墙的静止或固定位置在多个调整位置之间可调整。驱动组件202包括:第一驱动器203,其纵向定位在第一踏板臂212中;电动马达204,其用于旋转第一驱动器203;以及第二驱动器207,其纵向定位在第二踏板臂280中。在一些实施方式中,第一驱动器203和/或第二驱动器207可以各自是导螺杆和/或螺杆。第一驱动器203和第二驱动器207可以是细长轴,其具有适于与电动马达204配合的螺纹部分。在一些实施方式中,第一驱动器203和第二驱动器207由树脂(诸如尼龙)形成。在其他实施方式中,第一驱动器203和第二驱动器207由金属
(诸如钢)形成。第一驱动器203被配置为围绕中心纵向轴线205旋转,并且第二驱动器207被配置为围绕中心纵向轴线208旋转。
59.电动马达204从壳体的侧壁226d延伸,并且包括多个齿轮和柔性电缆206,所述柔性电缆206以已知的方式将电动马达204的输出轴连接到第一驱动器203,并且将电动马达204的输出轴连接到第二驱动器207。此外,应理解,电动马达204可以替代地耦合到壳体214上的任何其他地方。此外,应理解,驱动组件202可以包括一个以上的电动马达204。也就是说,一个马达可以专用于第一踏板臂212,而另外的马达可以专用于其他踏板,诸如第二踏板臂280。电动马达204可以连接到合适的控制电路,所述合适的控制电路具有操作员输入装置,用于选择性地操作电动马达204以将第一踏板臂212和第二踏板臂280定位在多个调整位置之间。
60.第一踏板臂212和第二踏板臂280的位置可由交通工具驾驶员在多个调整位置之间沿着向前方向
‑
向后方向调整。为了调整向前向后位置,驾驶员接合控制开关,所述控制开关激活电动马达204在期望方向上的旋转。电动马达204的旋转还经由柔性电缆206和第二驱动器207旋转第一驱动器203。为了将第一踏板臂212和第二踏板臂282返回到先前位置,电动马达204经由柔性电缆206和第二驱动器207在相反方向上旋转第一驱动器203,以如上所描述的在相反方向上移动部件。
61.在一些实施方式中,第一踏板臂212的上部216经由一对衬套224枢转地附接到壳体214,所述一对衬套224独立于壳体214并耦合到一对凹部288。所述一对衬套224各自包括内侧端部292a和相对的外侧端部292b、上表面238和下表面240,所述上表面238和下表面240形成在内侧端部292a和外侧端部292b之间延伸的孔242。在一些实施方式中,上表面238是平面的,并且下表面240是半圆形的。在其他实施方式中,上表面238可以是弓形的,并且下表面240可以是其他形状,诸如六边形、三角形、矩形等。此外,在一些实施方式中,上表面238不延伸下表面240的长度,使得形成一对耳部296或切口。在一些实施方式中,所述一对衬套224还包括在凸缘部分244处或邻近凸缘部分244的多个突出部298。所述一对衬套296和/或多个键298用作防止所述一对衬套224在通道234内旋转和/或在通道234内被束缚的键。
62.在一些实施方式中,所述一对衬套224被分离194,使得下表面240被分成两个半月形。此外,所述一对衬套224中的每一个衬套都可以包括凸缘部分244,所述凸缘部分244延伸超过上表面238和下表面240,并且定位在内侧端部292a和外侧端部292b之间。在一些实施方式中,凸缘部分244的内表面245和内侧端部292a分别地与第一踏板臂112的每个侧表面213a、213b和一对凹部288连通。
63.在一些实施方式中,当第三示例踏板组件210处于操作位置时,所述一对衬套224和所述一对凹部288定位在通道234内,如图11最佳所示。也就是说,所述一对衬套224的下表面240的一部分和凸缘部分244的一部分定位成与通道234连通,以限制或保持所述一对衬套224在通道234内静止,并且准许所述一对凹部288围绕所述一对衬套224的内侧端部292a旋转。因此,第一踏板臂212可以行进细长凹口230的长度,使得第一踏板臂212在操作期间在壳体214内枢转。
64.应理解,本公开的实施方式涉及踏板组件,所述踏板组件包括释放机构,所述释放机构将踏板臂的上部从壳体机械地脱离,以允许踏板臂的上部在受到碰撞时枢转离开壳
体。因此,踏板臂从操作位置移动到脱离位置,其中操作位置是踏板臂的正常位置,并且脱离位置是踏板臂从交通工具碰撞期间的不期望位置移动到交通工具碰撞期间的更期望位置的位置。在一些实施方式中,碰撞期间的期望位置可在壳体之外并且在交通工具的地板上。
65.应注意,术语“基本上”和“约”在本文中可用于表示可归因于任何定量比较、值、测量或其他表示的固有不确定度。这些术语在本文中还用于在不导致所讨论主题的基本功能发生变化的情况下表示定量表示可以从所述参考值变化的程度。
66.尽管本文已经示出和描述了特定的实施方式,但是应理解,在不脱离所要求保护的主题的精神和范围的情况下,可以进行各种其他的改变和修改。此外,尽管本文已经描述了所要求保护的主题的各个方面,但是这些方面不需要结合使用。因此,所附权利要求意图涵盖在要求保护的主题范围内的全部此类变化和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。