1.本发明涉及一种自主移行的地面处理设备,其包括:用于使地面处理设备在环境内自主移行的驱动装置,蓄能器,具有所述环境的环境地图的数据存储器和用于地面处理设备在环境内借助于环境地图导航和自定位的导航装置,其中,所述环境地图具有环境子区域。
2.此外,本发明还涉及一种用于运行这种地面处理设备的方法。
背景技术:
3.上述类型的地面处理设备在现有技术中是充分已知的。这些地面处理设备可以例如是诸如清洁机器人、割草机器人、抛光机器人、研磨机器人或打蜡机器人之类的地面处理机器人。地面处理设备通常具有至少一个地面处理元件,该地面处理元件用于地面处理设备的地面处理作业,该地面处理元件例如是诸如刷子或拖擦元件之类的清洁元件、抛光元件、研磨元件或割草元件等。已知给这类地面处理设备配备导航装置,该导航装置设计为在环境内导航和定位地面处理设备。为此,地面处理设备访问例如本身由地面处理设备创建的环境地图。为此,地面处理设备可以使用所谓的slam方法(同步定位和建图)。在地面处理作业期间,地面处理设备可以确定其在环境地图内的自身位置并且实施移动路径。在此还已知的是,在环境地图中标记在处理路线的走向中向哪些环境子区域行驶。
4.此外已知,地面处理设备的控制和评估装置根据事先计划的地面处理程序来控制一种或多种地面处理作业,其中,该地面处理程序例如规定在环境的多个环境子区域中的多种地面处理作业,地面处理设备随后在时间上依次处理完这些环境子区域。为了提供用于地面处理设备的耗电器、例如驱动装置的马达和/或地面处理元件的耗电器的能量,地面处理设备通常具有蓄能器、尤其蓄电池,该蓄能器借助于充电装置能重新充电。为此,地面处理设备可以例如自主地耦连到充电装置、例如集成在地面处理设备的服务站中的充电装置上。备选地,使用者也可以手动将地面处理设备和/或其蓄能器与充电装置连接。
5.为了尽可能有效率地在环境内实施多种地面处理作业,已知地面处理设备的不同的导航策略。一种策略规定,如此控制地面处理设备,使得在蓄能器中存在的能量数额用于处理环境的尽可能大的面区域、在理想情况下为所有待处理的环境子区域的尽可能100%。备选地可以规定,在尽可能短的时间段内实现对环境的处理。
6.在先前已知的地面处理策略中不利是,用于地面处理作业的从蓄能器的能量输出与蓄电池的电化学特性不匹配,也就是说,在某些情况下蓄能器的使用寿命不希望地被缩短和/或存在的最大容量未被最佳地利用。
技术实现要素:
7.基于上述现有技术,本发明所要解决的技术问题是提供一种自主移行的地面处理设备以及一种运行该地面处理设备的方法,该地面处理设备考虑了蓄电池、尤其锂离子蓄电池的电化学特性,其中,尤其改善了蓄能器的使用寿命和/或蓄能器的最大可能的蓄能器
容量。
8.为了解决上述技术问题,在此建议,所述环境地图关于至少两个子区域具有能量信息,该能量信息表明地面处理设备将需要多少能量数额来对相应的环境子区域进行地面处理。
9.按照本发明,在地面处理设备的环境地图、尤其持久性环境地图中这时存储有信息,该信息表明借助于地面处理设备实施对对应的环境子区域的地面处理需要多少能量数额。能量信息可以存储在环境地图本身中、即与对应的环境子区域相关联,或者也与环境地图链接以便将能量信息存储在与环境地图不同的文件中。用于对相应的环境子区域进行地面处理的能量数额与某个地面处理设备的定义的地面处理作业有关,其中,该定义的地面处理作业例如可以是标准地面处理作业,在使用者未特别选择的情况下,地面处理设备标准化地自动实施该标准地面处理作业。关于设计为吸尘器的地面处理设备,这样的标准地面处理作业可以例如是抽吸清洁作业,该抽吸清洁作业具有预先设定的某个功率等级、即抽吸等级和必要时清洁元件的转速。此外还可以规定,针对每个环境子区域存储有涉及不同的地面处理作业的多个能量信息,这些地面处理作业例如具有不同的地面处理强度或者借助于同一地面处理设备的不同清洁元件实施。这样的能量信息可以以与作业相关的方式例如存储在表格中,该表格与环境地图和/或相应的环境子区域链接。借助配设有能量信息的环境地图,地面处理设备的控制和评估装置这时可以例如规定这样的环境子区域作为处理地点,该环境子区域关于蓄能器的当前状态参数特别有利。特别优选地可以在下一次地面处理作业的范畴内处理这样的环境子区域,该环境子区域需要相对大的能量数额来最佳地实施定义的地面处理作业。由于输出相对大的能量数额,处于冷状态中的蓄能器可以有利地被加热。在此基于如下规定:蓄能器在工作运行开始时应当承受尽可能大的负荷,以便蓄能器因此尽快被加热并且蓄能器的固有内阻降低。通过选择耗能特别多的环境子区域,因此可以特别快地将蓄能器从冷状态置于热状态,从而可以实现有效率的能量输出。当然,在此还应当确保蓄能器绝不被加热超出某个最大温度,否则这会不利地影响蓄能器的使用寿命和质量。
10.尤其可以规定,所述能量数额根据在环境子区域中存在的地面类型来确定,和/或所述能量数额根据基于经验确定的用于处理环境子区域的能量数额来确定。根据第一实施方式,用于对某种地面类型进行地面处理的如此定义的标准地面处理通常需要的特征能量数额可以被计算。地面类型可以分为多个类别之一,例如分为硬地面和地毯地面,其中可以进一步细分。硬地面的子分类例如是瓷砖地面、木地板、pvc地面等。地毯地面或地毯可以细分为长绒地毯或地毯地面和短绒地毯或地毯地面等。与地面类型相关的能量数额一方面与某个环境子区域、尤其该环境子区域的面积有关,并且另一方面与定义的地面处理作业有关,为了实施该地面处理作业需要相关的能量数额。在此,地面处理作业可以由地面处理的某个强度、地面处理设备的为地面处理作业设定的某个地面处理参数、尤其地面处理元件和/或驱动装置的某个功率等级或地面处理设备的其它参数来定义。此外,能量数额可以附加或备选地基于经验来确定。在此,基于经验确定的能量数额优选根据地面处理设备的地面处理历史来确定。尤其地,根据地面处理设备的地面处理历史确定的多个能量数额可以取平均值,以便为定义的地面处理作业定义需要的能量数额的特征平均值。
11.此外建议,所述环境地图具有关于在环境子区域中存在的地面类型的地面类型信
息,其中,所述地面类型尤其选自硬地面、短绒地毯地面、长绒地毯地面。因此,在环境地图中或者备选地与环境地图链接地存储地面类型信息,这些地面类型信息识别其地面处理需要某个能量数额的环境子区域。与硬地面不同,例如地毯地面属于耗能特别多的地面类型。在此,对长绒地毯地面的地面处理还需要比对短绒地毯地面的地面处理更大的能量数额。如果地面处理设备例如是割草机器人,则地面类型可以根据待修剪的草的高度和/或根据草的由不同的草类构成的组成来区分,这些草类需要不同的能量数额来修剪。同样还可以定义例如与抛光设备或打蜡设备相关的地面类型信息,其中,这些地面类型可以例如通过由表面产生的机械阻力来特征化。在环境地图中存储的地面类型信息使得地面处理设备的控制和评估装置能够在任何情况下快速确定多个环境子区域之一需要的能量数额。
12.此外建议,所述环境地图针对相应的环境子区域表明为了进行地面处理需要的每个面积单位的特征能量数额。根据该设计方案,可以针对每个环境子区域已经计算出每个面积单位的特征能量数额,该特征能量数额优选同时根据例如用于如此定义的标准地面处理的定义的地面处理参数算出。在这种情况下,控制和评估装置不再需要专门在下一次地面处理作业开始之前根据地面类型信息首先计算需要的能量数额。而是可以根据每个面积单位的特征能量数额和待处理的环境子区域的已知面积直接确定为了由地面处理设备实施定义的地面处理需要的能量数额。在此,定义的地面处理遵循预定义的参数,这些参数例如对应于在地面处理作业期间地面处理设备的某个移行速度、某个地面处理强度以及必要时的其它参数。基于环境地图和关于此存储的每个面积单位的特征能量数额,因此可以直接识别哪些环境子区域是耗能相对多的和哪些环境子区域为了进行地面处理需要与此相比更少的每个面积单位的能量数额。
13.此外建议,地面处理设备具有控制和评估装置,该控制和评估装置设置为访问所述环境地图、将存储的能量数额彼此进行比较并且根据存储的能量数额确定所述环境子区域在时间上接连被处理的顺序。因此,控制和评估装置为多个环境子区域确定处理顺序。该处理顺序包含在环境的多个环境子区域中要实施的多个地面处理作业。在此,根据预定义的规则来确定地面处理作业的时间顺序,这些预定义的规则与在环境地图中存储的为了对相应的环境子区域进行处理需要的能量数额有关。用于确定顺序的规则考虑了能量数额的数值,因此,与耗能少的环境子区域相比,耗能多的环境子区域在处理顺序内的不同的时间点被处理。
14.关于这一点尤其建议,所述控制和评估装置设置为如此确定所述顺序,使得第一环境子区域在第二环境子区域之前被处理,该第一环境子区域的地面处理需要较大的第一能量数额,该第二环境子区域的地面处理需要与第一能量数额相比较小的第二能量数额。通过该用于在多个环境子区域中的地面处理的顺序的计划规则考虑到,地面处理设备的蓄能器在这些地面处理作业的顺序开始时应当承受尽可能高的负荷,以便因此将蓄能器尽可能快地加热并且带到工作温度。由于能量输出的初始功率峰值,蓄能器的内阻被减小,这使得蓄能器受到保护并且其使用寿命提高。在定义的顺序内,需要的能量数额相对较少的环境子区域尽可能最后被处理,而需要相对大的能量数额来被处理的环境子区域首先被处理。因此,这些环境子区域以关于其需要的能量数额下降的顺序被处理。在首先的一个或多个地面处理作业之后,蓄能器已经被预热,并且在所确定的地面处理顺序完成的情况下,其它环境子区域可以被有效率地清洁。对耗能少的环境子区域的地面处理在确定的顺序末尾
进行还实现了,蓄能器已经重新(相对于定义的顺序的能量最大值而言)稍微被冷却,并且蓄能的冷却阶段例如在蓄能器下一次重新充电之前提早开始。这额外地保护了蓄能器。此外,通过该措施,蓄能器较快地重新可供下一次工作使用。
15.有利地建议,所述控制和评估装置设置为将存储在所述蓄能器中的总能量数额分配给多个环境子区域,使得耗能多的环境子区域首先被处理,并且与之相比耗能不那么多的环境子区域随后以关于需要的能量数额下降的顺序被处理,直至存储的总能量数额完全分光。在确定顺序时,控制和评估装置就已经可以考虑可用的总能量数额,以便必要时可以针对一些或多个环境子区域调整地面处理设备的地面处理参数和/或设备参数,并且使得总能量数额优选足以能够完全处理在计划的顺序中的所有环境子区域。该变型尤其在针对一个环境子区域定义了多个备选的能量数额的地方是适宜的,这些备选的能量数额与不同的(备选的)地面处理参数有关。控制和评估装置可以从这些地面处理参数的选项中选择那些适合于使地面处理作业的顺序被完全地做完并且适应于在蓄能器中存储的总能量数额的选项。
16.此外可以规定,所述地面处理设备具有用于检测环境特征的障碍物传感器和/或用于根据环境特征创建环境地图的地图创建装置和/或地面类型传感器,该地面类型传感器设置为确定在环境子区域中存在的地面类型。在这种情况下,地面处理设备具有一个或多个自有的检测装置,该检测装置检测适合用于创建环境地图并且将辅助信息存储在环境地图中或将辅助信息与环境地图链接的参数。例如,地面处理设备可以具有障碍物传感器,该障碍物传感器一方面识别环境中的障碍物的存在,并且另一方面优选还识别这些障碍物在环境中的绝对位置或这些障碍物相对于地面处理设备位置的相对位置。在此基础上,地面处理设备的地图创建装置自身可以创建环境的环境地图。不再需要在环境中运行外部的障碍物传感器或者让环境地图由外部装置创建。障碍物传感器可以例如是地面处理设备的测距装置,该测距装置测量相对于在环境中存在的障碍物的距离。这种测距装置优选基于光学测量方法进行测量。尤其可以进行激光测量,该激光测量环绕地面处理设备测量相对于障碍物的距离。激光三角测量装置特别优选地适合用于此。此外,如所建议的,地面处理设备还可以具有地面类型传感器,该地面类型传感器检测并且识别环境的环境子区域的地面类型。地面类型传感器可以例如识别环境子区域的地面类型是硬地面还是地毯地面。特别优选地,地面类型传感器可以根据硬地面和地毯地面的子分类进一步区分例如短绒或长绒地毯地面、瓷砖地面和木地板等。地面类型可以借助于图像处理技术来确定,其中,地面类型传感器例如是摄像机,该摄像机拍摄环境的待处理的地面的图像。随后可以将摄像机图像与保存在存储器中的地面类型基准进行比较,其中,在当前地面与基准相一致的情况下,识别出环境子区域的地面类型。另外还可以通过反射测量来确定地面类型,其中考虑到地毯和地毯地面具有比硬地面更小的反射率。另外还可以通过触觉检测地面类型,例如方式是确定传感器陷入地面的材料中的沉陷特性(einsinkeigenschaft)。
17.除了前述地面处理设备之外,本发明还建议一种用于运行这种地面处理设备的方法,其中,关于所述环境地图的至少两个环境子区域存储信息,该信息表明地面处理设备将需要多少能量数额来对相应的环境子区域进行地面处理。上文关于地面处理设备描述的特征和优点也相应地适用于按照本发明的方法。为了避免赘述,关于该方法也参照前述陈述。
18.针对方法使用尤其可以规定,所述地面处理设备的控制和评估装置访问环境地
图、将存储的能量数额彼此进行比较并且根据存储的能量数额确定所述环境子区域在时间上接连被处理的顺序。尤其地,所述顺序可以被如此确定,使得第一环境子区域在第二环境子区域之前被处理,该第一环境子区域的地面处理需要较大的第一能量数额,该第二环境子区域的地面处理需要与第一能量数额相比较小的第二能量数额。因此,总体上在确定的顺序内首先处理优选耗能多的环境子区域,以便使蓄能器、优选蓄电池在地面处理作业的顺序开始时承受尽可能强的负荷,以便预热蓄能器并且因此将其带到工作温度。这尤其延长了蓄能器的使用寿命并且确保对地面处理设备的耗电器的有效率的能量供应。与现有技术中已知的用于处理多种地面处理作业的策略相反,该地面处理设备不是首先驶向与其自身位置最近的环境的环境子区域并且在那里实施地面处理作业,而是在环境内驶向这样的环境子区域,该环境子区域需要相对高或最高的能量数额来进行地面处理。这样的环境子区域可能是距地面处理设备的当前位置较远并且非相邻的环境子区域,因此,地面处理设备需要穿过另外的暂时非待处理的环境子区域,以便到达首先待处理的环境子区域。
附图说明
19.以下根据实施例详细阐述本发明。在附图中:
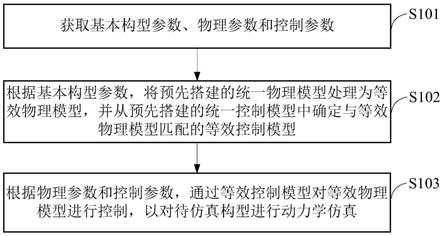
20.图1示出按照本发明的地面处理设备;
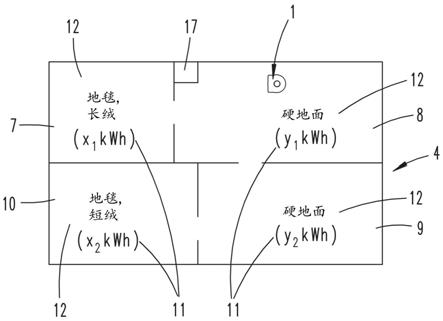
21.图2示出具有多个环境子区域的环境的环境地图;
22.图3示出具有环境子区域的参数以及沿着移行路线环境子区域的顺序的表格;
23.图4示出具有地面处理设备的移行路线的环境地图。
具体实施方式
24.图1首先示出示例性的自主移行的地面处理设备1,该地面处理设备可以例如设计为清洁机器人。地面处理设备1具有形式为借助于(未示出的)电动马达驱动的轮子的驱动装置2。该电动马达和地面处理设备1的其它耗电器由蓄能器3提供能量。蓄能器3优选是可重新充电的蓄电池。地面处理设备1还具有障碍物传感器14,该障碍物传感器设置为测量相对于在地面处理设备1的环境中存在的物体的距离。在此,障碍物传感器14例如是形式为激光三角测量装置的光学的测距装置。障碍物传感器14发出旋转的激光束,该激光束碰到物体并且在该物体上反射。借助反射的光束可以推断出地面处理设备1相对于物体的距离。障碍物传感器14的检测信号用于创建(示例性地在图2中示出的)环境地图4,该环境地图除了环境的平面图之外还可以包含在环境中多个环境子区域7、8、9、10内的物体的位置。环境地图4存储在地面处理设备1的数据存储器5中并且被导航装置6用来规划地面处理设备1通过环境的一个或多个环境子区域7、8、9、10的移行路线19(参见图4)。移行路线19被确定,以便能够在环境内由地面处理设备1尤其以关于时间和地点确定的顺序实施多种地面处理作业,该顺序允许对环境的多个环境子区域7、8、9、10的有效率的地面处理。在此,地面处理设备1的蓄能器3优选是可重新充电的蓄电池,该蓄电池可以在提供充电装置的基站17处被重新充电。优选地,蓄能器3是锂离子蓄电池。
25.为了实施一种或多种地面处理作业,地面处理设备1具有一个或多个地面处理元件18。在此,地面处理设备1例如具有基本上围绕水平轴线旋转的清洁辊,该清洁辊适合于处理硬地面和地毯地面。地面处理作业以及地面处理设备1的移行由地面处理设备1的控制
和评估装置13控制。此外,地面处理设备1具有地面类型传感器16,该地面类型传感器设计为检测和识别在环境子区域7、8、9、10中存在的地面类型。地面类型传感器16此处例如是光学传感器,该光学传感器设置为发射光信号并且根据在待处理的面上反射的光分量来识别相应的子区域7、8、9、10是何地面类型。作为通过评估反射率来识别地面类型的备选,备选的地面传感器16可以基于数字图像处理起作用,其中,将由地面类型传感器16拍摄的地面图像与已知地面类型的基准图像进行比较,其中,一旦拍摄的图像与基准图像一致或者在某个程度上相似,则识别出地面类型。
26.图2示出环境地图4,该环境地图已借助于地面处理设备1的地图创建装置15创建。但备选地也可行的是,外部的地图创建装置15、例如服务器上的计算装置承担环境地图4的创建并且将该环境地图提供给地面处理设备1或其控制和评估装置13以及导航装置6使用,以便规划移行路径19。在环境地图4中,此处例如标记环境的总共四个环境子区域7、8、9、10。在环境子区域8中存在地面处理设备1和基站17,该基站设置为在地面处理设备1上实施服务作业,此外对地面处理设备1的蓄能器3进行充电。在环境地图4中还存储有关于由地面处理设备1的地面类型传感器16识别到的地面类型的地面类型信息12,其中,环境子区域7具有长绒地毯地面,环境子区域8具有硬地面,环境子区域9具有硬地面,并且环境子区域10具有短绒地毯地面。此外,在环境地图4中配属于每个环境子区域7、8、9、10地存储有能量信息11,该能量信息表明地面处理设备1为了处理那里的地面将需要多少能量数额。在此,能量信息11例如涉及如此定义的用于相应的地面类型的标准地面处理作业。关于硬地面,例如定义风扇的某个抽吸功率等级和地面处理元件18的转速。同样地定义用于长绒和短绒的地毯或地毯地面的标准地面处理作业,在没有由地面处理设备1的使用者另外规定的情况下,地面处理设备1自动应用、即实施这些标准地面处理作业。针对地面处理作业定义的能量信息11直接存储在环境地图4中,此处例如为x
1 kwh、x
2 kwh、y
1 kwh和y
2 kwh。这些能量数额涉及在相应的环境子区域7、8、9、10中的整个地面处理作业。备选地,除了环境子区域7、8、9、10的尺寸之外,还可以存储每个面积单位需要的能量数额,因此,控制和评估装置13可以根据这些信息计算相应的环境子区域7、8、9、10需要的能量数额。必要时还可以将环境子区域7、8、9、10划分为多个下级子区域,以便能够有利地确定用于对环境子区域7、8、9、10进行地面处理的移行路径19。为了处理环境子区域7、8、9、10需要的能量数额可以基于经验根据过去由地面处理设备1实施的大量地面处理作业来确定。但此外,能量数额也可以基于理论根据在环境子区域7、8、9、10中存在的地面类型、关于地面处理设备1的耗电器的能量需求的信息和针对地面处理作业通常需要的时间段等来算出。
27.图3示出包含环境子区域7、8、9、10的参数的表格。在第一列中有环境子区域7、8、9、10。右边的一列示出在相应的环境子区域7、8、9、10中存在的地面类型,区分为地毯长绒的、硬地面、地毯短绒的。原则上,地面类型可以进一步细分为不同的硬地面等。此外,再右边的下一列表明能量信息11,该能量信息包含对相应的环境子区域7、8、9、10进行地面处理需要的能量数额,此处表示为x1、x2、y1、y2。根据在“能量数额”列中输入的数据,地面处理设备1的控制和评估装置13确定具有最大的用于环境子区域7、8、9、10的地面处理的能量需求的环境子区域7、8、9、10。此处例如是具有能量数额“x
1”的环境子区域7,该能量数额是为了对具有长绒地毯的环境子区域7进行地面处理必需的。随后,地面处理设备1的控制和评估装置13为移行路线19确定环境子区域7、8、9、10的顺序,在该移行路线内,地面处理设备1移
动通过环境子区域7、8、9、10,以便在那里在时间上接连地实施地面处理作业。在此,控制和评估装置13如此选择环境子区域7、8、9、10的顺序,使得首先清洁耗能特别多的环境子区域7、8、9、10,并且随后才清洁与之相比耗能较少的环境子区域7、8、9、10。在此,根据表格的在最右边示出的一列确定顺序,该顺序规定首先对环境子区域7的地面处理,随后对环境子区域10的地面处理,随后在环境子区域9中的地面处理作业,最后对环境子区域8的地面处理。在此,具有硬地面的环境子区域8需要最少的能量数额“y
1”,该能量数额小于对其余的环境子区域7、9、10进行处理需要的能量数额“x
1”、“y
2”和“x
2”。对耗能多的环境子区域7、8、9、10的优选处理确保,地面处理设备1的蓄能器3在移行路线19的开始时迅速加热到工作温度并且蓄能器的内阻被减小,这有助于蓄能器3的使用寿命以及最佳运行。由于此处例如为进行地面处理需要最少能量数额的环境子区域8被最后清洁,在蓄能器3在基站17处被重新充电之前,蓄能器3在移行路线19末尾还可以缓慢地再冷却。这节省了用于整个地面处理和重新充电过程的时间,因为在实际的充电作业可以进行之前不必先单独冷却蓄能器3。
28.最后,图4示出移行路线19,地面处理设备1的控制和评估装置13已经确定该移行路线以便处理环境子区域7、8、9、10。可以看到,从地面处理设备1的当前位置开始,首先清洁环境子区域7,该环境子区域不对应于地面处理设备1在移行路线19开始时所处的那个环境子区域8。而是,地面处理设备1首先驶入相邻的环境子区域7,从那里驶入同样具有地毯地面的环境子区域10并且随后才驶入具有待处理的硬地面的环境子区域9和8。
29.附图标记列表
30.1地面处理设备
31.2驱动装置
32.3蓄能器
33.4环境地图
34.5数据存储器
35.6导航装置
36.7环境子区域
37.8环境子区域
38.9环境子区域
39.10环境子区域
40.11能量信息
41.12地面类型信息
42.13控制和评估装置
43.14障碍物传感器
44.15地图创建装置
45.16地面类型传感器
46.17基站
47.18地面处理元件
48.19移行路线
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。