1.本发明属于通用型市售飞控的控制信号接入技术领域,涉及一种通用旋翼无人机飞控信号接入方法,通过主控制器来控制无人机自主飞行。
背景技术:
2.近年来,随着相关传感器的微型化和控制技术的日趋成熟,微小型无人飞行器逐渐成为公众关注和研究的热点。其中旋翼无人飞行器因具有易于控制和姿态灵活等优点,在民用领域得到了长足的发展。如今市场上也出现了诸多优秀的飞行控制器及相关产品,它们在稳定性和操作性方面表现突出。但这些产品由于飞控程序不开源留给用户的可拓展性往往非常有限,只能完成生产商出厂时设置好的功能,通常只有手动遥控、自动返航和地面站控制等方式。因此相关研究人员若要使用无人飞行器完成特定的任务就需要从飞行控制器入手,这无疑提高了研究的技术门槛。
技术实现要素:
3.(一)发明目的
4.本发明的目的是:提供一种通用旋翼无人机飞控信号接入方法,实现用户能够将微控制器产生的控制信号绕过人工遥控设备接入成品商用飞行控制器中,有效地利用市售商品飞控的高稳定性完成用户自定义的自主任务,如脱离手动遥控和地面站的自主起飞与降落,按照预设航线巡航等;同时也可以进一步联合视觉导航系统,完成目标识别和跟踪等更高层的智能自主任务,大大提高微小型无人飞行器的应用领域和可二次开发性。
5.(二)技术方案
6.为了解决上述技术问题,本发明提供一种通用旋翼无人机飞控信号接入方法,该方法包括分析所用飞控各通道控制信号的信号特征及与之对应的飞行器飞行动作或状态、使用主控制器产生特征相同的控制信号、通过控制信号选择模块切换输入到飞控的控制信号源为来自遥控器接收机的人工控制信号或者来自主控制器的自主控制信号,从而实现飞控信号的接入。
7.本发明方法具体包括以下步骤:
8.步骤一:分析所用飞控各通道控制信号的信号特征
9.分析所用飞控各通道控制信号的信号特征,控制信号通道包括横滚、俯仰、油门、偏航四个动作通道以及若干功能通道,包括但不仅限于控制模式切换通道、一键返航通道、机载云台控制通道等。控制信号包括主流的ppm和sbus两种遥控信号。信号特征是指所对应通道pwm控制信号的幅值、周期、占空比变化范围等。
10.步骤二:分析各通道控制信号对应的飞行器飞行动作或状态
11.对各控制信号通道进行编号,分析所用飞控各通道控制信号所对应的飞行器动作或状态,动作指飞控的横滚、俯仰、油门、偏航,状态指飞控的自主飞行、一键返航及云台控制,将通道编号与飞行器的飞行动作或状态建立起一一对应的映射关系,及各通道pwm控制
信号不同占空比所对应的飞行动作幅度或状态。
12.步骤三:使用主控制器产生控制信号,控制信号与步骤一中所分析的信号特征相对应
13.使用主控制器dsp作为飞控信号接入系统的主控制器,利用dsp的事件管理器(ev)输出所需数量的占空比和周期可变的pwm控制信号,其信号特征分别与所对应通道控制信号的信号特征一致。
14.步骤四:使用控制信号选择模块将主控制器的控制信号接入飞控
15.使用控制信号选择模块将主控制器的控制信号接入飞控,其中控制信号选择模块基于多通道二选一数据选择器芯片设计,通过数据选择器的数据选择引脚选择输入飞控的控制信号为原始控制信号(来自遥控器接收机)或者来自主控制器的控制信号,实现控制信号的接入。
16.(三)有益效果
17.上述技术方案所提供的通用旋翼无人机飞控信号接入方法,可以有效地利用市售商品飞控的高稳定性完成用户自定义的自主任务,如脱离手动遥控和地面站的自主起飞与降落,按照预设航线巡航等。同时也可以进一步联合视觉导航系统,完成目标识别和跟踪等更高层的智能自主任务,大大提高微小型无人飞行器的应用领域和可二次开发性。
附图说明
18.图1为遥控器接收机输出1
‑
4路控制信号特征的示意图。
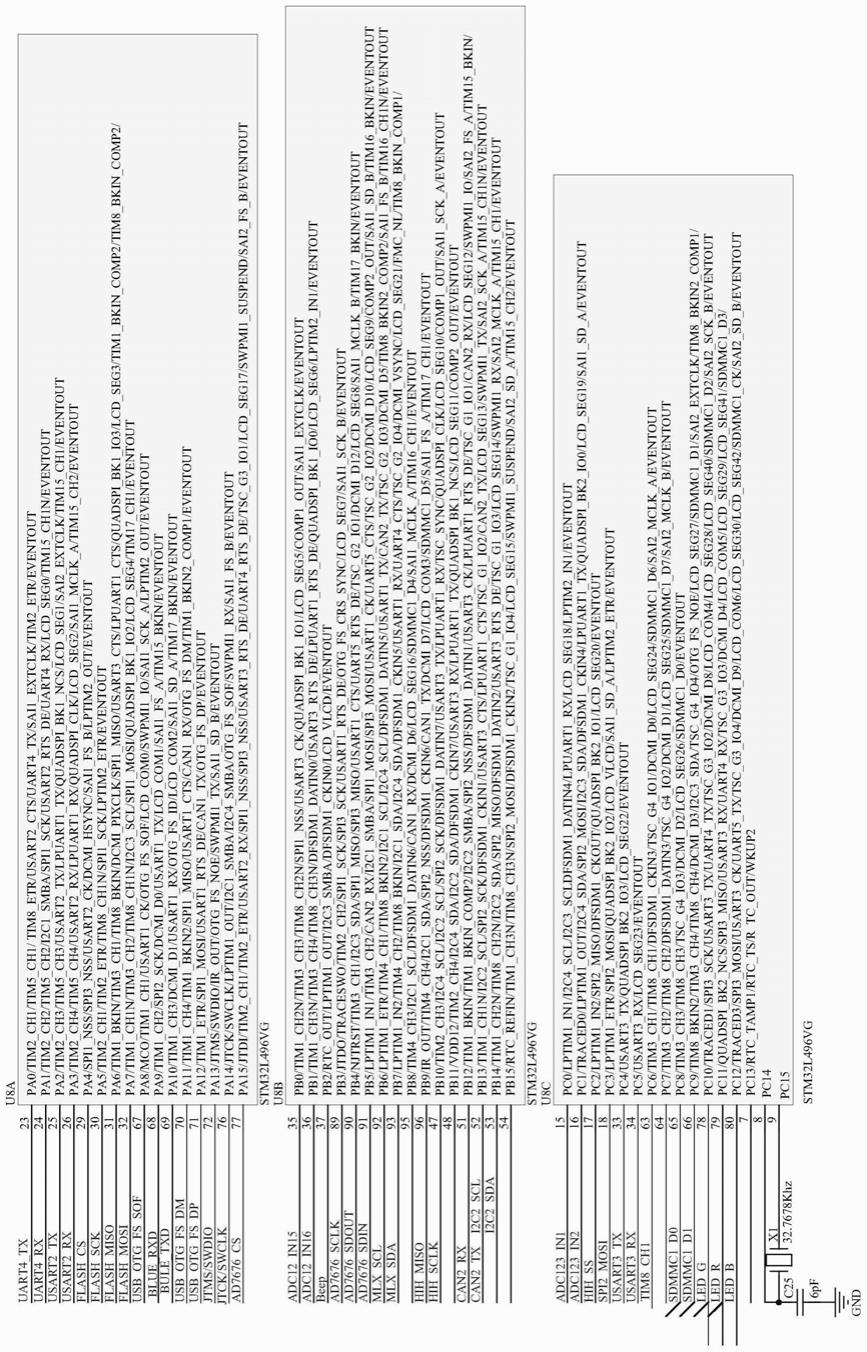
19.图2为整个飞控信号接入技术硬件系统框图。
20.图3为遥控器输出波形(a)与主控程序输出波形(b)对比图。
21.图4为74hc157引脚图。
22.图5为控制信号选择模块电路原理图。
具体实施方式
23.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
24.本实施例所使用的市售飞控为深圳市大疆创新科技有限公司(dji)生产的wookong
‑
m飞控,遥控器为futaba公司生产的t10cg,遥控接收机为futaba公司的r6208sb,主控制器为ti公司生产的数字信号处理器(dsp)tms320f2812。本实施例所选具体型号仅为方便详细描述,市售绝大多数飞控、遥控器和接收机基本原理都相同,均适用本发明所设计的方法,即本发明具有普适性。
25.本发明的一种通用旋翼无人机飞控信号的接入方法,包括以下步骤:
26.步骤一、分析所用飞控各通道控制信号的信号特征;
27.步骤二、分析各通道控制信号对应的飞行器飞行动作或状态;
28.步骤三、使用主控制器产生控制信号,控制信号与步骤一中所分析的信号特征相对应各通道分别对应的特征相同的控制信号;
29.步骤四、使用控制信号选择模块将主控制器的控制信号接入飞控。
30.步骤一中,分析所用飞控各通道控制信号的信号特征,具体包括:
31.分析所用飞控各通道的控制信号也即分析遥控器接收机相对应输出的各路pwm控制信号。r6208sb为8通道接收机,接收机和飞控系统共地,电源由飞控供给。通过示波器观察分析,得到8路控制信号的信号特征如表1所示。
32.步骤二,分析各通道控制信号对应的飞行器飞行动作或状态,具体包括:
33.通过分析,8路控制信号中的5路与飞行器动作具有一对一线性映射的对应关系。如油门摇杆拨向最下方,此时接收机对应的第3路信号向飞控第3通道发出幅值3.3v、周期14ms、脉宽1.12ms的pwm控制信号,如图1所示。该信号给到飞行控制器,飞控依据相应飞控算法调节各电机转速降到最小值。其他通道飞控信号与飞行器动作或状态的对应关系如表1所示。
34.表1飞行器动作与控制信号对应关系
[0035][0036][0037]
根据以上分析结果得出了遥控器各项操作与飞控接收到的pwm控制信号之间的映射关系。通过进一步的分析得知,该8路信号时序相同,并且8路信号之间不存在耦合,即对飞行器的控制作用是相互独立的。例如悬停状态下只改变通道1的信号,使其输出脉宽1.12ms的pwm控制信号,对应飞行器的姿态动作是以最大侧飞速度向左移动;而悬停状态下只改变通道2的信号,使其输出脉宽1.12ms的pwm控制信号,对应飞行器以最大侧飞速度向前移动。那么在悬停状态下同时改变通道1和通道2的信号,使其均输出脉宽1.12ms的pwm控制信号,则对应飞行器的姿态动作是以最大侧飞速度向左前方移动。
[0038]
通过以上信号分析的结论,可以得出使飞行器做出每种姿态动作相对应给飞控的pwm信号特征。
[0039]
步骤三,使用主控制器产生控制信号,控制信号与步骤一中所分析的信号特征相对应,具体包括:
[0040]
本发明应用了tms320f2812的一个典型最小系统,包括dsp芯片、电源电路、复位电路、时钟电路及jtag接口电路。在主控制器最小系统板的基础上,搭建了相关的外围电路,
包括飞控信号切换电路、外部供电稳压电路、控制信号ri输入接口和控制信号ri输出接口、状态指示led电路。整个飞控信号接入技术硬件系统框图如图2所示。主控制器设计程序中需要产生5路相互独立的pwm波形,对应通道1
‑
4、通道7分别使用eva的pwm1、pwm3、pwm5和evb的pwm7、pwm9,均使用连续增/减计数模式。设置evaregs.t1con.bit.tps=4,即t1clk=hspclk/16=4.6875m;evaregs.t1pr=0x802c,即pwm周期为14ms;evaregs.actr.all=0x0222,即pwm1/3/5均为高电平有效。
[0041]
部分介绍硬件电路设计:
[0042]
1、主控制器电源及复位电路
[0043]
tms320f2812工作时要求的电压分为两部分:3.3v的flash电压和1.8v的内核电压。本最小系统采用了ti公司的tps767d318芯片作为电源芯片。该芯片是线性降压型dc/dc变换芯片,输入电压 5v,芯片起振,正常工作之后能够产生3.3v和1.8v电压供dsp使用,其最大输出电流为1a,可以满足dsp芯片和少量外围电路的供电需求。同时该芯片自带电源监控及复位管理的功能,可以很方便地实现电源及复位电路的设计。
[0044]
2、主控制器时钟电路
[0045]
tms320f2812的时钟产生可以为外部振荡器方式或谐振器方式。本最小系统采用的是外部有源时钟方式,选用3.3v供电的30mhz有源晶振实现。系统工作初始化时可以通过编程选择最大为5倍频的锁相环功能,从而实现f2812的最高工作频率(150mhz)。
[0046]
3、主控制器jtag接口电路
[0047]
dsp仿真器是通过dso芯片上提供的扫描仿真引脚来实现仿真功能的,jtag接口消除了传统电路仿真时由于电缆过长而引起信号失真及仿真插头可靠性差等一系列问题。扫描仿真使在线仿真成为可能,给调试带来既大方便。
[0048]
4、外部供电稳压电路
[0049]
外部供电稳压电路同时为控制器最小系统、控制信号切换电路和遥控器接收机提供 5v直流电,由lm2596降压稳压芯片搭配外围电路组成。考虑到电池重量的限制,外部供电稳压电路与成品飞控系统共用一块3s航模锂聚合物电池供电。3s锂电池额定电压为12.6v、最低电压11.1v,且输出电流足够大,经过稳压电路降压后可以为自主飞行控制系统提供稳定的供电保障。
[0050]
5、串口通信电路
[0051]
tms320f2812有两组sci通信接口,scia和scib。sci模块的接受器和发送器都带有16位的堆栈寄存器,可以工作在半双工或者全双工模式。本最小系统选用符合rs232标准的max232驱动芯片进行串行通信。max232芯片功耗低,集成度高, 5v供电,具有两个接收和发送通道,正好与scia和scib相匹配。
[0052]
程序最终输出pwm波形符合控制波形要求,能够被飞控准确识别。遥控器输出波形与主控制器输出自主飞行波形对比结果如图3所示。
[0053]
步骤四,使用控制信号选择模块将主控制器的控制信号接入飞控,具体包括:
[0054]
经过实验对比,本发明最终选用四路二选一数据选择器74hc157配合稳压芯片cx1117
‑
3.3作为控制信号选择模块。74hct157是高速cmos四路二选一数据选择器,ttl或cmos电平输入,通道切换时间在6ns以内,完全符合本发明中系统对转换时间的要求。引脚图如图3所示。
[0055]
真值表如表2所示。
[0056]
表274hc157真值表
[0057][0058]
控制信号选择模块电路的原理图如图4所示。原理图中u1为74hc157四路二选一数据选择器,u2为5v转3.3v的稳压芯片,为74hc157提供3.3v的cmos电平。c1为10uf的钽电容,在电路中起到稳压滤波作用。u1的使能端始终处于低电平确保使能,通过改变选择端s的电平高低就可以选择接入飞控的控制信号源为来自遥控器接收机的人工控制信号或者来自主控制器的自主控制信号,从而实现飞控信号的接入。
[0059]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。