一种基于5g和人工智能的变电站智能巡检系统
技术领域
1.本发明涉及变电站智能巡检技术领域,尤其是涉及一种基于5g和人工智能的变电站智能巡检系统。
背景技术:
2.传统的视频监控系统和智能巡检机器人虽已发展相对成熟,但巡检设备间缺少联系,面对大量的巡检数据,缺少智能高效的分析、判别手段,影响了巡检结果的准确性,为进一步保障变电站的安全生产,必须引入新的自动化、智能化技术来解决此问题;随着5g技术的发展,各行业都在积极探索、拓展相关应用,国家电网公司5g基站的建设也在有序进行,推进5g在智能电网、能源互联网体系中的建设,5g网络通信技术传输速度快、传输稳定性高,能够解决工作环境场景复杂而造成的传输时间过长或者传输不稳定的问题;通过基于5g和人工智能技术的变电站智能巡检系统的研发与应用,可实现对变电站内关键设备复杂缺陷的智能检测和预警,对变电设备进行智能化异常检查和缺陷查找,用于变电站的日常监控及运营维护,极大减少基层运维人员工作负担,为电网的稳定运行提供有效保障;为此,我们提出了一种基于5g和人工智能的变电站智能巡检系统。
技术实现要素:
3.本发明要解决的技术问题是克服现有的缺陷,提供一种基于5g和人工智能的变电站智能巡检系统,可实现对变电站内关键设备复杂缺陷的智能检测和预警,对变电设备进行智能化异常检查和缺陷查找,用于变电站的日常监控及运营维护,极大减少基层运维人员工作负担,为电网的稳定运行提供有效保障,可以有效解决背景技术中的问题。
4.为了实现所述发明目的,本发明采用如下技术方案:一种基于5g和人工智能的变电站智能巡检系统,包括底座、调节架和无人机本体;底座:底部四角安装有转向单元,转向单元的端部安装有移动机构,所述底座的底端中部安装有电源,底座的顶部安装有plc控制器,且plc控制器的侧面装配有5g通信天线;调节架:通过水平调节调节单元安装在底座的顶部,所述调节架通过旋转轴转动连接有摆臂,摆臂的一端安装有俯仰角度调节单元,所述摆臂的另一端通过滑动机构与调节架活动连接;无人机本体:底部固定有起落架,起落架通过连接机构与滑动机构的活动部位连接,所述无人机本体上分别安装有信息采集单元和定位单元;其中,还包括第四伺服电机,所述第四伺服电机安装在调节架的侧面,第四伺服电机的输出轴上固定有线轮,所述线轮上缠绕有线缆,线缆的一端与无人机本体内的控制器电性连接,所述线缆的另一端通过电滑环电性连接plc控制器,所述plc控制器电性连接5g通信天线、第四伺服电机、电源和无人机本体内的控制器。
5.进一步的,所述转向单元包括第一伺服电机和电机座,第一伺服电机安装在底座的底部,所述电机座固定在第一伺服电机的输出轴上,第一伺服电机电性连接plc控制器。
6.进一步的,所述移动机构包括步进电机和移动轮,步进电机装配在电机座上,所述移动轮固定在步进电机的输出轴上,步进电机电性连接plc控制器。
7.进一步的,所述水平调节调节单元包括第二伺服电机、蜗杆和蜗轮,第二伺服电机安装在底座的顶部,所述蜗轮转动连接在底座的顶部,蜗杆固定在第二伺服电机的输出轴上且与蜗轮啮合传动,所述调节架固定在蜗轮的顶部,所述第二伺服电机电性连接plc控制器。
8.进一步的,所述俯仰角度调节单元包括第三伺服电机、齿轮和齿条,第三伺服电机安装在摆臂的端部,所述齿条固定在调节架上,齿轮固定在第三伺服电机的输出轴上且与齿条啮合传动,所述第三伺服电机电性连接plc控制器。
9.进一步的,所述滑动机构包括弧形滑轨和滑动座,弧形滑轨固定在调节架上,所述滑动座滑动连接在弧形滑轨上,滑动座固定在摆臂的端部。
10.进一步的,所述连接机构包括吸附铁块和电磁铁,吸附铁块固定在起落架的底部,所述电磁铁装配在滑动座上,电磁铁与吸附铁块磁性连接,所述电磁铁电性连接plc控制器。
11.进一步的,所述定位单元包括gps定位器和红外避障传感器,红外避障传感器安装在无人机本体的侧面,所述gps定位器安装在无人机本体的顶部,gps定位器和红外避障传感器均电性连接无人机本体内的控制器。
12.进一步的,所述信息采集单元包括热成像摄像机、多光谱成像仪和工业相机,热成像摄像机、多光谱成像仪和工业相机均安装在无人机本体的侧面,所述热成像摄像机、多光谱成像仪和工业相机均电性连接无人机本体内的控制器。
13.与现有技术相比,本发明的有益效果是:本基于5g和人工智能的变电站智能巡检系统,具有以下好处:1、基于5g技术的精准定位与海量数据实时传输,5g技术具有超高带宽,极低延时等优势,将其用于巡检机器人上大大提高了巡检的实时性与时效性,解决了现有网络带宽不足导致的视频图像丢帧卡顿、网络延时高等通信问题,5g技术的运用提高了巡检效率,保障了无人巡检作业体系的高效稳定运转,为巡检机器人的发展提供了更加广阔的空间。
14.2、无人机本体带动信息采集单元对需要进行检测的区域进行信息采集,其便于无人机本体对一些移动不到的地方进行巡检作业,其通过移动机构和无人机本体的协作配合,大大提高了该巡检系统的巡检能力。
15.3、通过水平调节调节单元对信息采集单元的水平工作角度进行调节,通过俯仰角度调节单元对信息采集单元的俯仰工作角度进行调节,其调节能力强,提高了信息采集单元的信息采集能力。
16.4、其可实现对变电站内关键设备复杂缺陷的智能检测和预警,对变电设备进行智能化异常检查和缺陷查找,用于变电站的日常监控及运营维护,极大减少基层运维人员工作负担,为电网的稳定运行提供有效保障。
附图说明
17.图1为本发明的立体结构示意图;图2为本发明的底部结构示意图;图3为本发明的角度调节局部结构示意图;图4为本发明的无人机本体局部结构示意图。
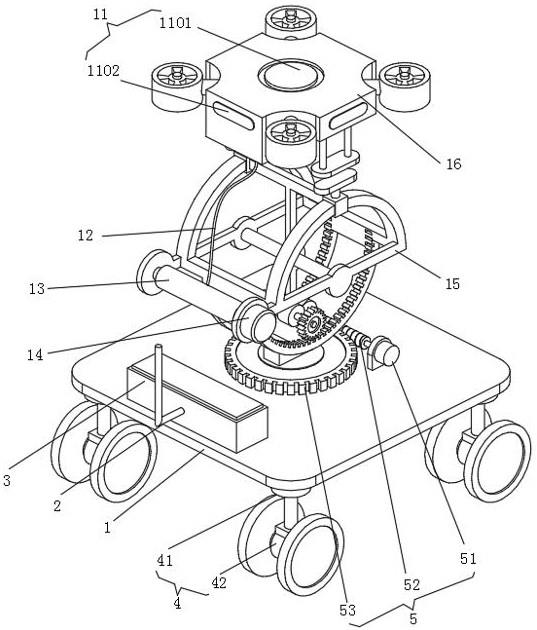
18.图中:1底座、2 5g通信天线、3 plc控制器、4转向单元、41第一伺服电机、42电机座、5水平调节调节单元、51第二伺服电机、52蜗杆、53蜗轮、6滑动机构、61弧形滑轨、62滑动座、7连接机构、71吸附铁块、72电磁铁、8移动机构、81步进电机、82移动轮、9俯仰角度调节单元、91第三伺服电机、92齿轮、93齿条、10信息采集单元、101热成像摄像机、102多光谱成像仪、103工业相机、11定位单元、1101 gps定位器、1102红外避障传感器、12线缆、13线轮、14第四伺服电机、15调节架、16无人机本体、17起落架、18电源、19旋转轴、20摆臂、21电滑环。
具体实施方式
19.通过下面的实施例可以详细地解释本发明,公开本发明的目的旨在保护本发明范围内的一切技术改进。
20.请参阅图1
‑
4,本实施例提供一种技术方案:一种基于5g和人工智能的变电站智能巡检系统,包括底座1、调节架15和无人机本体16;底座1:底部四角安装有转向单元4,转向单元4的端部安装有移动机构8,底座1的底端中部安装有电源18,底座1的顶部安装有plc控制器3,且plc控制器3的侧面装配有5g通信天线2;plc控制器3处理的信息通过5g通信天线2传递到远程监控端,5g技术具有超高带宽,极低延时等优势,将其用于巡检机器人上大大提高了巡检的实时性与时效性,解决了现有网络带宽不足导致的视频图像丢帧卡顿、网络延时高等通信问题,5g技术的运用提高了巡检效率,保障了无人巡检作业体系的高效稳定运转,为巡检机器人的发展提供了更加广阔的空间;巡检机器人之间可以通过5g通信天线2进行网络互联;调节架15:通过水平调节调节单元5安装在底座1的顶部,调节架15通过旋转轴19转动连接有摆臂20,摆臂20的一端安装有俯仰角度调节单元9,摆臂20的另一端通过滑动机构6与调节架15活动连接;无人机本体16:底部固定有起落架17,起落架17通过连接机构7与滑动机构6的活动部位连接,无人机本体16上分别安装有信息采集单元10和定位单元11;其中,还包括第四伺服电机14,第四伺服电机14安装在调节架15的侧面,第四伺服电机14的输出轴上固定有线轮13,线轮13上缠绕有线缆12,线缆12的一端与无人机本体16内的控制器电性连接,线缆12的另一端通过电滑环21电性连接plc控制器3,plc控制器3电性连接5g通信天线2、第四伺服电机14、电源18和无人机本体16内的控制器。
21.第四伺服电机14的输出轴带动线轮13转动,线轮13对线缆12进行放线操作,然后,无人机本体16带动信息采集单元10对需要进行检测的区域进行信息采集,其便于无人机本体16对一些移动不到的地方进行巡检作业,其通过移动机构8和无人机本体16的协作配合,
大大提高了该巡检系统的巡检能力。
22.转向单元4包括第一伺服电机41和电机座42,第一伺服电机41安装在底座1的底部,电机座42固定在第一伺服电机41的输出轴上,第一伺服电机41电性连接plc控制器3,第一伺服电机41的输出轴通过电机座42带动移动机构8转动,从而对移动机构8的行走方向进行调节,保证了设计的合理性。
23.移动机构8包括步进电机81和移动轮82,步进电机81装配在电机座42上,移动轮82固定在步进电机81的输出轴上,步进电机81电性连接plc控制器3,步进电机81的输出轴带动移动轮82转动,移动轮82将底座1移动到工作区域,从而方便进行巡检工作。
24.水平调节调节单元5包括第二伺服电机51、蜗杆52和蜗轮53,第二伺服电机51安装在底座1的顶部,蜗轮53转动连接在底座1的顶部,蜗杆52固定在第二伺服电机51的输出轴上且与蜗轮53啮合传动,调节架15固定在蜗轮53的顶部,第二伺服电机51电性连接plc控制器3,第二伺服电机51的输出轴带动蜗杆52转动,蜗杆52与蜗杆52啮合传动,蜗杆52带动调节架15转动,从而对信息采集单元10的水平工作角度进行调节,其调节能力强,提高了信息采集单元10的信息采集能力。
25.俯仰角度调节单元9包括第三伺服电机91、齿轮92和齿条93,第三伺服电机91安装在摆臂20的端部,齿条93固定在调节架15上,齿轮92固定在第三伺服电机91的输出轴上且与齿条93啮合传动,第三伺服电机91电性连接plc控制器3,第三伺服电机91的输出轴带动齿轮92转动,齿轮92与齿条93啮合传动,从而带动摆臂20移动,摆臂20通过旋转轴19与调节架15发生相对转动,从而对信息采集单元10的俯仰工作角度进行调节,其调节能力强,提高了信息采集单元10的信息采集能力。
26.滑动机构6包括弧形滑轨61和滑动座62,弧形滑轨61固定在调节架15上,滑动座62滑动连接在弧形滑轨61上,滑动座62固定在摆臂20的端部,摆臂20的端部带动滑动座62沿着弧形滑轨61滑动,保证了信息采集单元10在进行俯仰调节时的稳定性。
27.连接机构7包括吸附铁块71和电磁铁72,吸附铁块71固定在起落架17的底部,电磁铁72装配在滑动座62上,电磁铁72与吸附铁块71磁性连接,电磁铁72电性连接plc控制器3,当需要通过无人机本体16转移到移动机构8达不到的区域进行信息采集时,电磁铁72断电从而失去与吸附铁块71的连接约束作用,其连接分离方便,便于使用。
28.定位单元11包括gps定位器1101和红外避障传感器1102,红外避障传感器1102安装在无人机本体16的侧面,gps定位器1101安装在无人机本体16的顶部,gps定位器1101和红外避障传感器1102均电性连接无人机本体16内的控制器,通过红外避障传感器1102对无人机本体16周围的障碍信息进行检测,通过gps定位器1101对无人机本体16所在的空间位置进行定位,通过定位便于进行智能巡检作业。
29.信息采集单元10包括热成像摄像机101、多光谱成像仪102和工业相机103,热成像摄像机101、多光谱成像仪102和工业相机103均安装在无人机本体16的侧面,热成像摄像机101、多光谱成像仪102和工业相机103均电性连接无人机本体16内的控制器,通过热成像摄像机101、多光谱成像仪102和工业相机103对工作区域的图像信息进行采集,采集的信息传递给无人机本体16内的控制器,无人机本体16内的控制器将信息输送给plc控制器3,plc控制器3对信息进行分析处理,plc控制器3处理的信息通过5g通信天线2传递到远程监控端,在进行定位时,可通过信息采集单元10进行视觉信息的采集,从而配合定位单元11达到精
确定位的效果。
30.其巡检过程包括:一:任务管理以任务方式进行机器人巡视工作管理,根据实际需求,对巡检任务计划进行制定,巡检任务可分为:红外巡检任务、可见光巡检任务,系统提供各种任务类型的规范模板,支持巡检任务的增加、编辑、删除等功能;二:智能巡检包括兼容变电站机器人的多源数据来源,结合5g技术快速、实时、精准获取设备的红外图像、可见光等多光谱信息,红外图像信息由机器人搭载热成像摄像机101、多光谱成像仪102和工业相机103进行采集,并通过5g通信天线2传输至后台巡检管理系统进行管理,可见光图像主要巡视类型包括表计识数、主要设备外观变化识别、铭牌识别,照片信息由机器人搭载工业相机103进行采集,后台管理系统提供对各种照片进行分类管理、查询、浏览功能,系统支持影像资料批量导入及导出;三:设备管理系统提供多年的设备历史巡检数据的管理,包括以“巡检任务”、“巡检设备”、“巡检人员”、“巡检时间”等多维度的历史数据管理,系统基于历史巡检的可见光、红外大数据,结合设备投产年限,品牌,地理区域等因素,智能化监测建立风险预警模型,对温度异常常发区域和发生异常的设备部件发生进行历史的统计分析,形成风险预测,指导巡检工作,对发生故障和异常的数据设备数据进行统计分析,形成风险预测模型,可根据设备投运时间、厂家品牌、气候环境、电力负荷等多种因素,对可能发生异常的设备和位置进行预测分析,做出预警,系统提供缺陷管理功能,实现缺陷信息查询,同时可对缺陷进行状态标记、图片预览,对应的缺陷信息可直接查询相关的照片和红外测温信息,并支持相应缺陷信息对应的到位情况查看;三:巡检报告系统提供各种业务报表的查询统计及一键输出,包括巡检任务表单、缺陷登记表单、人员到位情况表单等业务表单的输出;四:系统管理系统管理包括人员管理、角色管理、权限管理、日志管理、组织机构管理等,提供人员基础信息管理功能,按照组织机构进行划分,对人员信息进行新增、修改、删除、角色绑定等;提供角色信息管理功能,按照系统业务应用进行划分设置,对角色进行新增、修改、删除、权限绑定等;提供权限信息管理功能,按照系统业务应用中角色的权限进行划分设置功能,为每一个角色分配相应的权限;提供日志管理,对系统操作、异常等信息进行记录,方便查询,为系统运行、维护、管理提供支持;提供组织机构动态管理功能,对组织机构进行动态更新、编辑、删除,根据实际情况可灵活配置;系统建立红外缺陷信息库和非红外巡检缺陷信息库,对巡检过程中产生的两类缺陷信息进行专类查询管理,提供缺陷专题渲染展示的功能,在缺陷专题窗口,按“一般缺陷”、“严重缺陷”、“危机缺陷”进行分析、统计。
31.为了实现机器人变电站智能化巡检任务,本系统运用ai图像识别、多光谱融合等核心技术,利用多维图像智能检测、机器人联合巡检、缺陷影像自学习与图像识别、云端异
构分析、边云协同等多方面的技术,提高对变电设备状态的管控能力,图像标签利用深度学习技术、海量训练数据,可以对图片进行智能分类、物体识别。
32.系统运行产生的经济效益和社会效益本系统通过对巡视数据的自动化分析,最大限度发挥机器人安全、稳定、高效的优势,提高巡视的精度、效率,增强变电站巡视的全面性、可靠性,应用智能化图像识别处理技术,提高变电站巡检工作自动化水平、智能化水平,减少隐患发现时长,缩短故障处理时间,大大减少人员分析处理的工作量,减少人工识别处理误报率和漏报率,提高分析的准确性和有效性;通过历史图像分析计算,能够很好的识别处理隐患等隐蔽缺陷,能够显著提高变电站巡检工作效率、效益,降低作业成本,且提升数据标准化,提高工作效率,节省大量人力成本。
33.经济效益:该项目的实施可减少运维人员的工作量;可延长设备检修周期,降低了检修成本,提高设备寿命;可减少误操作,提高整个变电站工作效率和安全性可靠性,大幅缩短了断电时间,从而减少变电站供电中断而造成的损失成本;主要计算依据如下:新增产值=运维人员的人工成本 延长设备寿命的折旧 节省的供电中断损失;1)根据单个变电站运维特点,平均每周可减少到站运维次数2次,运维人员2人,运维工作检查时间按2小时计,运维分析工作按3小时计,来回往返按1小时计,每年人工成本和车辆损耗可大大减少。
34.2)本项目可以利用对设备状态分析、高频率红外测温技术,延长设备检修周期,降低了检修成本,提高资产运营效益,并在一定程度上延长设备使用寿命,目前设备折旧年限为10年,一个变电站设备以2000万元计算,设备寿命提高1年,设备的折旧费非常可观。
35.3)本项目在变电站的应用,减少了人工的繁琐操作和误操作,提高整个变电站工作效率,安全可靠性及效率的提高大幅缩短了断电时间。
36.社会效益:1)从社会效益分析:该系统的应用,减少了主设备停电检修次数和时间,通过顺控操作、故障告警远方验证技术等手段,进一步缩短了设备操作时间,提高了电网可靠性,利用远程智能巡检技术、设备状态可视化、智能告警及分析决策、故障信息高级分析决策等高级应用功能,有力支撑了包含动态安全评估、预警、辅助决策的电网安全防御体系的建设,使得电网安全水平得到提升。
37.2)经济与环境效益方面:该系统的应用可以降低检修和运维成本,能有效控制人工成本,其次,该系统的投用可以提高设备的运行可靠性和变电站的管理水平和效率。
38.3)安全效益方面:该系统的应用将设备的状态信息、运行数据进行收集,传送到主机进行分析,并可实现设备状态估计、故障分析、智能分析和智能告警等功能,能快速判断和定位变电站的故障类型和位置,缩短恢复带电时间,通过智能告警,能及早分析和判断故障的危险程度,利于快速制定相应决策,将风险控制在最小程度。
39.本发明提供的一种基于5g和人工智能的变电站智能巡检系统的工作原理如下:通过红外避障传感器1102对无人机本体16周围的障碍信息进行检测,通过gps定位器1101对无人机本体16所在的空间位置进行定位,通过热成像摄像机101、多光谱成像仪102和工业
相机103对工作区域的图像信息进行采集,采集的信息传递给无人机本体16内的控制器,无人机本体16内的控制器将信息输送给plc控制器3,plc控制器3对信息进行分析处理,并规划出移动机构8以及无人机本体16的移动路径,plc控制器3处理的信息通过5g通信天线2传递到远程监控端,第一伺服电机41的输出轴通过电机座42带动移动机构8转动,从而对移动机构8的行走方向进行调节,步进电机81的输出轴带动移动轮82转动,移动轮82将底座1移动到工作区域,第二伺服电机51的输出轴带动蜗杆52转动,蜗杆52与蜗杆52啮合传动,蜗杆52带动调节架15转动,从而对信息采集单元10的水平工作角度进行调节,第三伺服电机91的输出轴带动齿轮92转动,齿轮92与齿条93啮合传动,从而带动摆臂20移动,摆臂20通过旋转轴19与调节架15发生相对转动,摆臂20的端部带动滑动座62沿着弧形滑轨61滑动,从而对信息采集单元10的俯仰工作角度进行调节,当需要通过无人机本体16转移到移动机构8达不到的区域进行信息采集时,电磁铁72断电从而失去与吸附铁块71的连接约束作用,然后,第四伺服电机14的输出轴带动线轮13转动,线轮13对线缆12进行放线操作,然后,无人机本体16带动信息采集单元10对需要进行检测的区域进行信息采集。
40.值得注意的是,以上实施例中所公开的plc控制器3控制5g通信天线2、第四伺服电机14、无人机本体16、第一伺服电机41、步进电机81、第二伺服电机51、第三伺服电机91和电磁铁72均采用现有技术中常用的方法,无人机本体16内的控制器控制gps定位器1101、红外避障传感器1102、热成像摄像机101、多光谱成像仪102和工业相机103均采用现有技术中常用的方法,gps定位器1101、红外避障传感器1102、热成像摄像机101、多光谱成像仪102、工业相机103、5g通信天线2、第四伺服电机14、无人机本体16、第一伺服电机41、步进电机81、第二伺服电机51、第三伺服电机91和电磁铁72均根据实际应用场景进行选型配置,plc控制器3型号选用欧姆龙csi系列。
41.本发明未详述部分为现有技术,尽管结合优选实施方案具体展示和介绍了本发明,具体实现该技术方案方法和途径很多,以上所述仅是本发明的优选实施方式,但所属领域的技术人员应该明白,在不脱离所附权利要求书所限定的本发明的精神和范围内,在形式上和细节上可以对本发明做出各种变化,均为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。