1.本发明属于机器人技术领域,具体涉及一种三自由度全解耦并联机械腿腿部构型及四足机器人。
背景技术:
2.腿式机器人比带式、履轮式机器人具有更高的灵活性,更适合在复杂地形中作业,尤其是在突发灾难的区域,比如:火灾、地震、厂房区内赤气泄漏等,一般的器械都无法有效、快速的将探测、救援设备运送到目的地。腿式机器人具备较高的越障能力更加适合到这些地方进行工作。因此,对于军用、民用腿式机器人的研究有着重要的实际意义。
3.腿式机器人主要分为两足、四足和六足机器人,其中四足机器人静态稳定性优于二足,且机构的冗余和复杂程度比六足要简单很多。近年来,国内外涌现了大量的四足机器人,包括bisam,hyq,kolt,bigdog,aibo,scout i,titan,littledog,teken。其中最具有代表性的是波土顿动力公司开发的bigdog,他不仅可以实现多种运动步态,还具有很强的环境适应能力和抗干扰的能力。但是,上述机器人都采用串联机构构型设计,机器人结构尺寸大,机械腿重量大、转动惯量大,大部分机器人驱动系统位于机械腿上,惯性冲击大,连续性差。
4.因此,需要对现有四足机器人的机械腿进行改进,能够克服尺寸大、重量大、转动惯量大、惯性冲击大等问题。
技术实现要素:
5.有鉴于此,本发明提供了一种三自由度全解耦并联机械腿腿部构型及四足机器人,以便解决上述提到的技术问题。
6.本发明的技术方案是:
7.一种三自由度全解耦并联机械腿腿部构型,包括:
8.定平台;
9.等效髋关节,设置在所述定平台的一侧,且其第一端与所述定平台固定;
10.第三直线驱动部件,其一端与所述等效髋关节的第二端固定;
11.小腿执行机构,其一端与所述第三直线驱动部件的另一端铰接;
12.支撑杆,其中一端与所述等效髋关节的第三端固定;
13.动平台,设置在所述定平台下侧,其中一侧与所述支撑杆的另一端固定,另外一侧与所述小腿执行机构铰接;
14.第一驱动组件和第二驱动组件,分别设置在所述等效髋关节的两侧,且位于所述定平台和动平台之间,其一端分别与所述定平台连接,另外一端分别与所述动平台连接。
15.优选的,所述等效髋关节包括封闭端与所述定平台固定的第一u型件,所述第一u型件的两个开口端分别与十字轴的第一对轴铰接,所述十字轴的第二对轴分别与第二u型件的两个开口端铰接,所述第二u型件的封闭端与第三直线驱动部件固定;所述十字轴的第
二对轴上还铰接有第三u型件的两个开口端,所述第三u型件的封闭端与支撑杆固定。
16.优选的,所述第一驱动组件包括一端与所述定平台固定的第一万向节,所述第一万向节的另一端与第一直线驱动部件的一端固定,所述第一直线驱动部件的另一端固定第一球铰的一端,所述第一球铰的另一端与所述动平台固定。
17.优选的,所述第二驱动组件包括一端与所述定平台固定的第二万向节,所述第二万向节的另一端与第二直线驱动部件的一端固定,所述第二直线驱动部件的另一端固定第二球铰的一端,所述第二球铰的另一端与所述动平台固定。
18.一种四足机器人,包括上述的一种三自由度全解耦并联机械腿腿部构型。
19.优选的,所述三自由度全解耦并联机械腿腿部构型有四个,分为两组前后阵列布置或对称布置。
20.与现有技术相比,本发明提供的一种三自由度全解耦并联机械腿腿部构型及四足机器人,对现有四足机器人的机械腿进行改进,克服了现有技术中机械腿的尺寸大、重量大、转动惯量大、惯性冲击大等问题,具有以下有益效果:
21.1、本发明设计了等效髋关节机构,利用第三直线驱动部件、第一驱动组件和第二驱动组件可以独立驱动小腿执行机构,具有全解耦性,使机械腿具有更好的灵活性;
22.2、本发明基于并联机构构型,比传统的串联机械腿具有更大的刚度、更大的承载能力、连续性更好、动态响应更好;
23.3、本发明通过直线驱动部件提供直线驱动力来驱动小腿运动,具体实现可以通过液压缸、或通过旋转电机丝杠传动、或直线电机直接驱动,结构更加简单易实现;
24.4、本发明解决了机器人在地形复杂、环境恶劣的作业条件下行走的负载能力与机动性问题,实用性强,值得推广。
附图说明
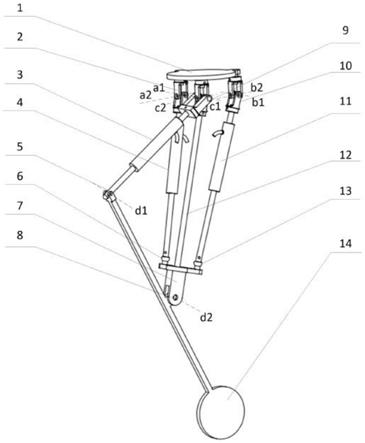
25.图1为本发明的三自由度全解耦并联机械腿腿部构型的结构示意图;
26.图2为本发明的等效髋关节的结构示意图:
27.图3为本发明的四足机器人的结构示意图。
28.附图标记:
29.1、定平台;2、第一万向节;3、第三直线驱动部件;4、第一直线驱动部件;5、第三铰链;6、第一球铰;7、动平台;8、铰链;9、等效髋关节;10、第二万向节;11、第二直线驱动部件;12、支撑杆;13、第二球铰;14、小腿执行机构;15、第二u型件;16、第一u型件;17、十字轴;18、第三u型件;a1、第一轴线;a2、第二轴线;b1、第三轴线;b2、第四轴线;c1、第五轴线;c2、第六轴线;d1、第七轴线;d2、第八轴线;i、机身;ii、三自由度全解耦并联机械腿腿部构型。
具体实施方式
30.本发明提供了一种三自由度全解耦并联机械腿腿部构型及四足机器人,下面结合图1到图3的结构示意图,对本发明进行说明。
31.实施例1
32.本实施例提供了一种三自由度全解耦并联机械腿腿部构型,如图1所示,包括定平台1、第一万向节2、第三直线驱动部件3、第一直线驱动部件4、第三铰链5、第一球铰6、动平
台7、铰链8、等效髋关节9、第二万向节10、第二直线驱动部件11、支撑杆12、第二球铰13、小腿执行机构14;
33.其中,等效髋关节9,设置在定平台1的一侧,且其第一端与定平台1固定;第三直线驱动部件3,其一端与等效髋关节9的第二端固定;小腿执行机构14,其一端与第三直线驱动部件3的另一端铰接;支撑杆12,其中一端与等效髋关节9的第三端固定;动平台7,设置在定平台1下侧,其中一侧与支撑杆12的另一端固定,另外一侧与小腿执行机构14铰接。
34.第一驱动组件和第二驱动组件,分别设置在等效髋关节9的两侧,且位于定平台1和动平台7之间,其一端分别与定平台1连接,另外一端分别与动平台7连接。
35.进一步具体的,第一驱动组件包括一端与定平台1固定的第一万向节2,第一万向节2的另一端与第一直线驱动部件4的一端固定,第一直线驱动部件4的另一端固定第一球铰6的一端,第一球铰6的另一端与动平台7固定。
36.进一步具体的,第二驱动组件包括一端与定平台1固定的第二万向节10,第二万向节10的另一端与第二直线驱动部件11的一端固定,第二直线驱动部件11的另一端固定第二球铰13的一端,第二球铰13的另一端与动平台7固定。
37.优选地,第一直线驱动部件4、第二直线驱动部件11、第三直线驱动部件3、可以采用如下任一种形式:液压缸驱动、旋转电机驱动丝杠传动或者直线电机驱动。
38.进一步具体的,如图2所示,等效髋关节9的具体结构包括第二u型件15、第一u型件16、十字轴17、第三u型件18,其中,第一u型件16的封闭端与定平台1固定,第一u型件16的两个开口端分别与十字轴17的第一对轴铰接,十字轴17的第二对轴分别与第二u型件15的两个开口端铰接,第二u型件15的封闭端与第三直线驱动部件3固定;十字轴17的第二对轴上还铰接有第三u型件18的两个开口端,第三u型件18的封闭端与支撑杆12固定。
39.其中,如图1所示,分别将第一万向节2的两个轴线记为第一轴线a1、第二轴线a2,第二万向节10的两个轴线记为第三轴线b1、第四轴线b2,等效髋关9的两个轴线记为第五轴线c1、第六轴线c2,第三铰链5的轴线记为第七轴线d1,铰链8的轴线记为第八轴线d2。第一轴线a1、第三轴线b1、第五轴线c1、第七轴线d1、第八轴线d2相互平行。第二轴线a2、第四轴线b2、第六轴线c2相互平行。
40.第一直线驱动部件4通过第一万向节2与定平台1相连接、通过第一球铰6与动平台7相连接,第二直线驱动部件11通过第二万向节10与定平台1相连接、通过第一球铰13与动平台7相连接接,支撑杆12一端通过等效髋关节9与定平台1相连接、另一端通过焊接与动平台7相连接,第三直线驱动部件3通过等效髋关节9与定平台1相连接、另一端通过第三铰链5与小腿执行机构14相连接,小腿执行机构14通过铰链8与动平台7相连接。
41.每一条腿的小腿执行机构14都具有前后、左右、上下运动能力,相应的,小腿执行机构14可以绕着等效髋关节的第五轴线c1、第六轴线c2转动,当驱动第二直线驱动部件11时,小腿执行机构14绕着第五轴线c1转动,从而实现小腿的前后运动,当驱动第一直线驱动部件4时,小腿执行机构14绕着第六轴线c2转动,从而实现小腿的左右运动,当驱动第三直线驱动部件3时,可以带动小腿执行机构14绕着第八轴线d2转动,从而实现小腿的上下运动;当第一直线驱动部件4、第二直线驱动部件11、第三直线驱动部件3同时驱动时,可以驱动小腿执行机构14实现前后、左右、上下的连续协调运动,从而实现小腿的三维运动。
42.实施例2
43.本实施例提供了一种机器人,具体的是一种四足机器人,如图3所示,其中包括机身i和布置在机身上的四条上述三自由度全解耦并联机械腿腿部构型ii,四条所述三自由度全解耦并联机械腿腿部构型ii的定平台1通过螺栓连接在机身i的下方分为两组前后阵列布置或对称布置。
44.本实施例提供的机器人,通过驱动三自由度全解耦并联机械腿腿部构型ii,小腿执行机构可以在驱动下协同运动实现各种行走轨迹,驱动四个三自由度全解耦并联机械腿腿部构型ii,通过四个并联机械腿相互协调运动,就可以实现四足机器人的三维空间运动,从而在复杂地形工作。
45.本实施例组合形成的四足机器人整体采用的并联腿部构型,具有全耦合性、较高的腿部机动能力较大的负载能力,更适宜工作在复杂恶劣的作业环境下。因此,与现有技术相比,本实施例从结构上解决了机器人在复杂、恶劣环境下作业的问题,该方法可靠性更高、更经济。
46.本发明提供的一种三自由度全解耦并联机械腿腿部构型及四足机器人,与常规腿结构相比,设计了一种全新的并联机械腿腿部构型,设计了等效髋关节机构,并联机械腿腿部构型的第一轴线a1、第三轴线b1、第五轴线c1、第七轴线d1、第八轴线d2相互平行,第二轴线a2、第四轴线b2、第六轴线c2相互平行,因此该并联机构的三个驱动可以单独作用使小腿执行机构绕着某一个方向转动,也可以三个驱动同时作用使小腿执行机构在空间实现连续的三维运动,该并联机构构型具有全解耦性,使机械腿具有更好的灵活性。由于采用并联机构构型,比传统的串联机械腿具有更大的刚度、更大的承载能力、连续性更好、动态响应更好。本发明通过直线驱动部件提供直线驱动力来驱动小腿运动,具体实现可以通过液压缸、或通过旋转电机丝杠传动、或直线电机直接驱动,结构更加简单易实现。本发明解决了机器人在地形复杂、环境恶劣的作业条件下行走的负载能力低、机动性差、速度慢、转动惯量大的问题,实用性强,值得推广。
47.以上公开的仅为本发明的较佳具体实施例,但是,本发明实施例并非局限于此,任何本领域技术人员能思之的变化都应落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。