一种用于回收auv的智能仿生软体机械手
技术领域
1.本发明属于机械手技术领域,尤其涉及一种用于回收自主式水下航行器的智能仿生软体机械手。
背景技术:
2.现今,海洋约占据了地球总面积的七成左右。随着科技的发展和人类海洋开发步伐的不断加快,水下机器人技术作为人类探索海洋最重要的手段得到了空前的重视和发展。其中,自主式水下机器人(auv)是当今世界海洋军事和探测领域的一个重要的发展方向。
3.自主式水下机器人(auv)可用于军事侦察、海洋科学考察、勘测海底等领域;auv的研究对提高多领域工程技术发展具有一定的辐射作用;在auv的众多技术中,auv的水下回收控制技术更是其中的关键技术之一。
4.现有auv的水下回收方式主要有两种:一是把auv当做一种武器装备,用母艇的鱼雷管进行发射和回收;二是嵌入式搭载回收。但现有回收方式受环境和回收装置影响较大,均很难做到快速、高效、无损的对auv进行回收。因此,如何快速、高效、无损的对auv进行回收成为现在亟需解决的一个问题。
技术实现要素:
5.为解决背景技术中存在的问题,本发明的目的是提供一种用于回收自主式水下航行器的智能仿生软体机械手。
6.本发明的技术方案如下:
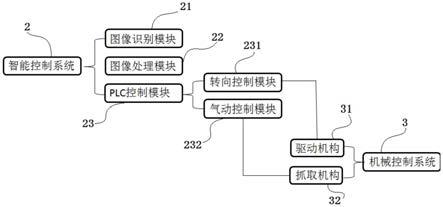
7.一种用于回收auv的智能仿生软体机械手,包括:装载架、智能控制系统和机械控制系统组成,所述装载架安装在不同的回收载体上;所述智能控制系统包括图像识别模块、图像处理模块、plc控制模块;所述机械控制系统包括驱动机构和抓取机构;所述图像识别模块用于对auv的位置进行识别,所述图像处理模块用于对识别到的auv位置信息进行处理,所述plc控制模块用于接收处理后的auv位置信息,并对驱动机构和抓取机构发出控制指令,驱动机构用于调整抓取机构的角度,抓取机构用于抓取相应的auv。
8.作为本发明的优选,所述图像识别模块包括网络摄像机、摄像机护罩、摄像机支架和工业以太网,所述网络摄像机通过卡扣与摄像机护罩连接,所述网络摄像机通过螺栓安装在摄像机支架上,所述摄像机支架通过螺栓安装在装载架的前端位置,所述前端工业以太网通过插件插接在网络摄像机后部的100m自适应以太网接口中,以保证网络摄像机所获得的auv位置图像能够通过工业以太网传输至图像处理模块中。
9.作为本发明的优选,所述图像处理模块包括工业平板电脑和后端工业以太网,所述工业平板电脑通过卡扣嵌入在回收载体中,所述后端工业以太网分为图像信号输入线和数据指令输出线,均插在工业平板电脑的左端,其中上方插入的是图像信号输入线,图像信号输入线的另一端与前端工业以太网连接,下方插入的是数据指令输出线,用于与plc控制
模块相连接。
10.作为本发明的优选,所述plc控制模块包括转向控制模块和气动控制模块,所述转向控制模块用于对驱动机构发出控制转向角度指令,所述气动控制模块用于对抓取机构发出控制抓取指令。
11.作为本发明的优选,所述驱动机构包括伺服电机、行星齿轮减速器、蜗轮蜗杆减速器和动力输出轴,所述伺服电机与行星齿轮减速器通过键连接,所述行星齿轮减速器与蜗轮蜗杆减速器通过键连接,所述蜗轮蜗杆减速器与动力输出轴通过键连接,所述动力输出轴上焊接有支撑板,所述支撑板用于固定抓取机构,所述支撑板可随着动力输出轴的转动实现360
°
任意角度旋转,来完成抓取机构的角度变换。
12.作为本发明的优选,所述抓取机构包括气动装置和波纹管,所述气动装置包括气动三联件、消音器、气源分配器,所述气动三联件通过螺栓安装在支撑板上,所述消音器通过分别通气管路与气动三联件和气源分配器连接,所述气源分配器的接口处布置有气动电磁换向阀用于控制气体的压力;所述波纹管是以章鱼触手为原型设计,所述波纹管的数量至少为三个,所述波纹管的上端与启动电磁换向阀连接,所述波纹管的下端处于封闭状态,所述波纹管内加入有用于保证使用强度的钢丝束,所述波纹管的一侧设置有无波纹区。
13.作为本发明的优选,所述网络摄像机是长为330~345mm、宽为60~70mm、高为55~60mm的矩形结构;所述网络摄像机的像素为400~800万、帧率为50~60hz、工作温度为
‑
100℃~100℃;所述摄像机护罩是长为335~350mm、宽为65~75mm、高为60~65mm、厚度为5mm的矩形结构;所述摄像机支架是边长为8~10mm、长度为350~400mm的正方体结构。
14.作为本发明的优选,所述工业平板电脑使用opencv对auv位置图像进行处理,其中的计算机语言如下:
15.mat srcimage=imread("xxx")
16.canny(srcimage,midimage,50,200,3)
17.cvtcolor(midimage,dstimage,cv_gray2bgr)
18.vector<vec4i>lines
19.houghlinesp(midimage,lines,1,cv_pi/180,80,50,10)
20.处理过程包括以下步骤:
21.步骤s1:对载入auv位置图像和mat变量定义;
22.步骤s2:对auv位置进行边缘检测并转化为灰度图;
23.步骤s3:对步骤s2中得到的图进行霍夫线变换;
24.步骤s4:依次在图中绘制出每条线段;
25.步骤s5:提取一组最长的线段,计算出中心线,并计算角度。
26.作为本发明的优选,所述伺服电机的功率为1kw~2kw、长为150~250mm、宽为120~180mm、高为100~150mm的矩形结构,所述伺服电机的输出轴直径为20~24mm、长度为8~10mm;所述行星齿轮减速器的减速比为3~8、工作温度在
‑
35℃~75℃;所述蜗轮蜗杆减速器的额定输出扭矩为800~5000n.m、减速比为30~75、输入功率为0.4kw~15kw;所述动力输出轴为长为300~350mm、直径为50~65mm的圆柱形。
27.作为本发明的优选,所述波纹管的长度为1000~1100mm、内径为90~100mm、外径为140~160mm,两条波纹之间的间距为30~35mm;所述波纹管是由70~85%的氟硅橡胶、10
~15%的低苯基硅橡胶和5~10%的乙烯基硅橡胶制备而成;所述钢丝束由8~12条钢丝捻制而成,其中每条钢丝的直径范围为1~1.5mm、捻距为0.5~2mm、捻向为s型。
28.本发明的有益效果如下:
29.本发明提供的用于回收auv的智能仿生软体机械手,可以模仿章鱼触手的运动轨迹,其操作简便、灵活性强,适用于水下探测器的回收作业,有效的解决了现有回收方法操作困难、使用精度低、灵活性差,且工作时易损伤auv等问题。
附图说明
30.通过参考以下结合附图的说明,并且随着对本发明的更全面理解,本发明的其它目的及结果将更加明白及易于理解。在附图中:
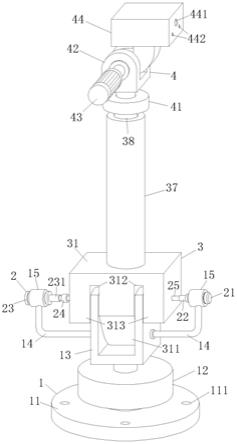
31.图1为本发明的机械控制系统中的驱动机构的示意图;
32.图2为本发明的抓取机构的中气动装置的示意图;
33.图3为本发明中抓取机构中的波纹管结构构示意图;
34.图4为本发明的结构框图。
35.其中的附图标记为:装载架1、智能控制系统2、机械控制系统3、图像识别模块21、图像处理模块22、plc控制模块23、驱动机构31、抓取机构32、转向控制模块231、气动控制模块232、伺服电机311、行星齿轮减速器312、蜗轮蜗杆减速器313、动力输出轴314、支撑板4、气动装置321、波纹管322、气动三联件3211、消音器3212、气源分配器3213、无波纹区3221。
具体实施方式
36.为使本领域技术人员能够更好的理解本发明的技术方案及其优点,下面结合附图对本技术进行详细描述,但并不用于限定本发明的保护范围。
37.在本技术的描述中,需要说明的是,术语“内”、“下”等指示的方位或位置关系为:基于附图所示的方位或位置关系,或者是该申请产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
38.在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
39.参阅图1和图4所示:一种用于回收auv的智能仿生软体机械手,包括:装载架1、智能控制系统2和机械控制系统3组成,装载架1安装在不同的回收载体上,装载架1是长为1300~1500mm、宽为1100~1300mm的矩形结构,装载架1通过8~10根方钢焊接而成。智能控制系统2包括图像识别模块21、图像处理模块22、plc控制模块23;机械控制系统3包括驱动机构31和抓取机构32;图像识别模块21用于对auv的位置进行识别,图像处理模块22用于对识别到的auv位置信息进行处理,plc控制模块23用于接收处理后的auv位置信息,并对驱动机构31和抓取机构32发出控制指令,驱动机构31用于调整抓取机构32的角度,抓取机构32用于抓取相应的auv;
40.图像识别模块21包括网络摄像机、摄像机护罩、摄像机支架和工业以太网,网络摄像机通过卡扣与摄像机护罩连接,网络摄像机通过螺栓安装在摄像机支架上,摄像机支架通过螺栓安装在装载架1的前端位置,前端工业以太网通过插件插接在网络摄像机后部的100m自适应以太网接口中,以保证网络摄像机所获得的auv位置图像能够通过工业以太网传输至图像处理模块22中;其中网络摄像机是长为330~345mm、宽为60~70mm、高为55~60mm的矩形结构;网络摄像机的像素为400~800万、帧率为50~60hz、工作温度为
‑
100℃~100℃;摄像机护罩是长为335~350mm、宽为65~75mm、高为60~65mm、厚度为5mm的矩形结构;摄像机支架是边长为8~10mm、长度为350~400mm的正方体结构;
41.图像处理模块22包括工业平板电脑和后端工业以太网,工业平板电脑通过卡扣嵌入在回收载体中,后端工业以太网分为图像信号输入线和数据指令输出线,均插在工业平板电脑的左端,其中上方插入的是图像信号输入线,图像信号输入线的另一端与前端工业以太网连接,下方插入的是数据指令输出线,用于与plc控制模块相连接;工业平板电脑使用opencv对auv位置图像进行处理,其中的计算机语言如下:
42.mat srcimage=imread("xxx")
43.canny(srcimage,midimage,50,200,3)
44.cvtcolor(midimage,dstimage,cv_gray2bgr)
45.vector<vec4i>lines
46.houghlinesp(midimage,lines,1,cv_pi/180,80,50,10)
47.处理过程包括以下步骤:
48.步骤s1:对载入auv位置图像和mat变量定义;
49.步骤s2:对auv位置进行边缘检测并转化为灰度图;
50.步骤s3:对步骤s2中得到的图进行霍夫线变换;
51.步骤s4:依次在图中绘制出每条线段;
52.步骤s5:提取一组最长的线段,计算出中心线,并计算角度。
53.plc控制模块23包括转向控制模块231和气动控制模块232,转向控制模块231用于对驱动机构31发出控制转向角度指令,气动控制模块232用于对抓取机构32发出控制抓取指令。
54.继续参阅图1和图4:驱动机构31包括伺服电机311、行星齿轮减速器312、蜗轮蜗杆减速器313和动力输出轴314,伺服电机311与行星齿轮减速器312通过键连接,行星齿轮减速器312与蜗轮蜗杆减速器313通过键连接,蜗轮蜗杆减速器313与动力输出轴314通过键连接,动力输出轴314上焊接有支撑板4,支撑板4用于固定抓取机构32,支撑板4可随着动力输出轴314的转动实现360
°
任意角度旋转,来完成转向控制模块231发出的转向角度指令;其中伺服电机311的功率为1kw~2kw、长为150~250mm、宽为120~180mm、高为100~150mm的矩形结构,伺服电机311的输出轴直径为20~24mm、长度为8~10mm;行星齿轮减速器312的减速比为3~8、工作温度在
‑
35℃~75℃;蜗轮蜗杆减速器313的额定输出扭矩为800~5000n.m、减速比为30~75、输入功率为0.4kw~15kw;动力输出轴314为长为300~350mm、直径为50~65mm的圆柱形。
55.参阅图2至图4所示:抓取机构32包括气动装置321和波纹管322,气动装置321包括气动三联件3211、消音器3212、气源分配器3213,气动三联件3211通过螺栓安装在支撑板4
上,消音器通3212过分别通气管路与气动三联件3211和气源分配器3213连接,气源分配器3213的接口处布置有气动电磁换向阀用于控制气体的压力以驱动波纹管322完成气动控制模块232发出的抓取指令;所述波纹管322是以章鱼触手为原型设计,所述波纹管322的数量至少为三个,所述波纹管322的上端与气动电磁换向阀连接,所述波纹管322的下端处于封闭状态,所述波纹管322内加入有用于保证使用强度的钢丝束,所述波纹管322的一侧设置有无波纹区3221;波纹管322的长度为1000~1100mm、内径为90~100mm、外径为140~160mm,两条波纹之间的间距为30~35mm;波纹管322是由70~85%的氟硅橡胶、10~15%的低苯基硅橡胶和5~10%的乙烯基硅橡胶制备而成;钢丝束由8~12条钢丝捻制而成,其中每条钢丝的直径范围为1~1.5mm、捻距为0.5~2mm、捻向为s型。
56.本发明的工作原理为:
57.利用回收载体在水下工作,当auv进入到网络摄像机的监控范围内,网络摄像机会对auv进行图像识别,并将所识别到的图像由前端工业以太网穿出,由后端工业以太网传入至工业平板电脑内,工业平板电脑将传入的图像进行黑白处理并提取图像边缘,根据所提取的图像边缘图依次绘制出图中每条线段,提取一组最长的线段,并计算出抓取机构32需要旋转的角度,角度参数信号经过数据指令输出线传入plc控制模块23内,由转向控制模块231接收到角度参数信号后对驱动机构31发出指令,伺服电机311接收到指令后开始提供动力,通过行星齿轮减速器312及蜗轮蜗杆减速器313传递动力,从而带动动力输出轴314和焊接在动力输出轴314上的支撑板4进行相应角度的转动,当抓取机构32转动到相应位置时,转向控制模块231会接收到停止转动指令,同时气动控制模块232会收到开始抓取指令,气动控制模块232将会对气动装置321发出信号,气动装置321接收到信号后,气源会产生气体经气动三联件3211及消音器3212对气体进行处理,而后进入至气源分配器3213,气源分配器3213接口处布置的气动电磁换向阀以控制气体的压力,对波纹管322进行充气,待波纹管322内的气压增大时,波纹管322外侧由于是波纹状所以能够膨胀,而波纹管322内侧由于是非波纹区,所以不会发生膨胀变形,通过至少三根波纹管322的外壁膨胀变形弯曲即可将中间的auv成功抓取。
58.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。