1.本发明涉及机器人抓取装置技术领域,具体为一种工业生产机器人抓取装置。
背景技术:
2.如今,工业货物分拣机器人通过不同的分拣方法,经过有序的执行步骤来实现货物、包裹的智能化分拣,通过使用物流分拣机器人的目的在于降低货物、包裹的分拣投递失误件数和失误率,借以提高分拣工作效率,工业货物的上下料仍大多数通过人工作业来完成,对人的依赖性较大,从而带来诸多弊端,生产效率低,人工成本高,人工校正容易出错,降低了良品率,加工设备处于停机状态,降低了设备的使用率,非人工、智能化分拣、储存的设备,长期在这样环境中工作会直接影响作业人员的身体健康。
3.但是,目前的工业货物分拣机器人抓取装置夹持的力道一般难以准确控制,在与工业货物直接接触的情况下,哪怕用保护垫保护,往往也会对快递件造成损伤,为此提出一种可以减少抓取力道控制不准确给快递件带来损伤的工业货物分拣机器人抓取装置来解决此问题,也不具有可以旋转的旋转夹手,不能够运送货物更换货物的位置,运送呆板,在运行过程,路程不平整,不能够做到行驶缓慢稳定的效果,不能够保证运送抓取的稳定性,缺乏经济效益,自动化程缺乏,缺乏实用性及安全性。
4.所以我们提出了一种工业生产机器人抓取装置,以便于解决上述中提出的问题。
技术实现要素:
5.本发明提供了一种工业生产机器人抓取装置,无法高效控制机器人抓取装置夹持的力道,一般难以准确控制,在与工业货物直接接触的情况下,哪怕用保护垫保护,往往也会对快递件造成损伤,也不能使得夹取货物时旋转调整方向,使得货物方向不一致,运送呆板,在运行过程,路程不平整,不能够做到行驶缓慢稳定的效果,不能够保证运送抓取的稳定性。
6.为实现上述目的,本发明采取的技术方案为:包括旋转抓手装置,所述旋转抓手装置的一侧外表面设置有压力传感装置,所述压力传感装置的一侧外表面设置有连接轴,所述连接轴的一侧设置有转动轴,所述转动轴的一侧设置有保护壳,所述保护壳下端外表面设置有转动扣,所述转动扣的一侧设置有连接线,所述转动扣下端外表面设置有连接杆,所述连接杆下端外表面设置有旋转齿轮,所述旋转齿轮一侧外表面设置有联动轴,所述联动轴的下端设置有旋转底座,所述旋转底座下端外表面设置有底板,所述底板一侧外表面设置有多型轮装置。
7.优选的,所述旋转抓手装置包括固定轴、旋转套轴、外侧转杆与内侧转杆,所述固定轴的下端设置有旋转套轴,所述旋转套轴的下端设置有外侧转杆,所述外侧转杆的下端外表面设置有内侧转杆。
8.优选的,所述压力传感装置包括压力头、传感片、连接器与传输器,所述压力头的一侧设置有传感片,所述传感片的一侧外表面设置有连接器,所述连接器的一侧外表面设
置有传输器。
9.优选的,所述多型轮装置包括履带圈、固定转盘、联动盘、履带盘、联动转盘与固定芯,所述履带圈的内壁设置有固定转盘,所述固定转盘的一侧设置有联动盘,所述联动盘的一侧设置有联动转盘,所述联动转盘的一侧设置有履带盘,所述联动盘的一侧设置有固定芯。
10.优选的,所述固定轴与旋转套轴之间设有插槽,且固定轴下端外表面通过插槽与旋转套轴上端外表面转动连接,所述外侧转杆与内侧转杆之间设有槽孔,且外侧转杆下端外表面通过槽孔与内侧转杆上端外表面转动连接。
11.优选的,所述压力头与传感片之间设有螺槽,且压力头一侧外表面通过螺槽与传感片一侧外表面可拆卸连接,所述连接器与传输器之间设有槽口,且连接器一侧外表面通过槽口与传输器一侧外表面可拆卸连接。
12.优选的,所述履带圈与固定转盘之间设有转槽,且履带圈内壁外表面通过转槽与固定转盘外壁外表面转动连接,所述联动盘与固定芯之间设有卡槽,且联动盘一侧外表面通过卡槽与固定芯一侧外表面可拆卸连接,所述履带盘与联动转盘之间设有卡槽,且履带盘一侧外表面通过卡槽与联动转盘一侧外表面转动连接。
13.优选的,所述转动扣与连接杆之间设有转动槽,且转动扣一侧外表面通过转动槽与连接杆一侧外表面可拆卸连接,所述旋转底座与底板之间设有转动槽,且旋转底座下端外表面通过转动槽与底板上端外表面转动连接。
14.与现有技术相比,本发明的有益效果是:该装置方便抓取的统一性能,便于调整,在使用时可以具备可以减少抓取力道控制不准确给快递件带来损伤的优点,解决了目前的分拣机器人抓取装置夹持的力道一般难以准确控制,可以使得在行驶过程,哪怕遇到减速带和斜坡也可以做到行驶稳定的效果,保证运送货物的稳定性,减少损失,既保正了便捷性,又实现了所需的实用性功能:1、该一种工业生产机器人抓取装置,在使用时,旋转抓手装置可以使得在抓取货物时高效的操作,便于抓取货物可以旋转位置,方便抓取的统一性能,便于调整,具有实用性,固定轴可以旋转固定,通过后端的转动系统带动操作,提供转向动力,一侧的旋转套轴可以旋转,带动一侧的外侧转杆与内侧转杆转动,便于抓取货物,使得货物抓取能够及时调整,操作便捷,具有高效的实用性,操作简单,具有高效实用性,连接效率极大的提升,且拆卸时相应的更加方便;2、该一种工业生产机器人抓取装置,在使用时,压力传感装置在使用时可以具备可以减少抓取力道控制不准确给快递件带来损伤的优点,解决了目前的分拣机器人抓取装置夹持的力道一般难以准确控制,极大地具有实用性,压力头可以感触抓手的力度,通过抓手抓取货物来反馈给传感片,进一步的分析,调节力度,一侧的连接器可以连接固定插件,后端的传输器通过连接线传输给系统分析受压力值,便于感知抓取货物的压力,使得整个结构形成一体且自动化程度高,大大提高工作效率,具有实用性;3、该一种工业生产机器人抓取装置,在使用时,多型轮装置可以使得在行驶过程,哪怕遇到减速带和斜坡也可以做到行驶稳定的效果,保证运送货物的稳定性,减少损失,履带圈便于行驶,稳定又安全,固定转盘通过电机联动提供动力来源,一侧的联动转盘可以提供动能转动,一侧的联动盘便于整体行驶,保证稳定安全,固定芯固定装配,一侧的履带盘
使得行驶主动力得到高效安全稳定的效果,操作方便简单,便于拆卸,具有实用性,使用方便安全。
附图说明
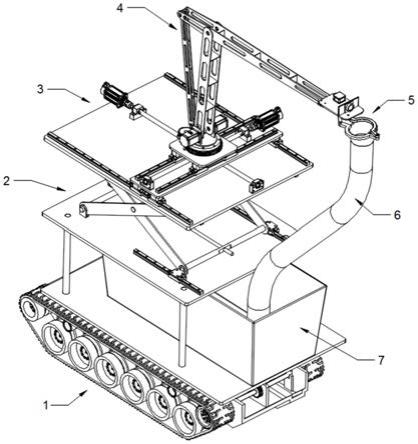
15.图1为本发明一种工业生产机器人抓取装置的整体结构示意图;图2为本发明一种工业生产机器人抓取装置的旋转抓手装置结构示意图;图3为本发明一种工业生产机器人抓取装置中压力传感装置整体结构示意图;图4为本发明一种工业生产机器人抓取装置的多型轮装置结构示意图;图5为本发明一种工业生产机器人抓取装置的旋转抓手装置剖面结构示意图;图6为本发明一种工业生产机器人抓取装置多型轮装置正视结构示意图;图中:1、旋转抓手装置;101、固定轴;102、旋转套轴;103、外侧转杆;104、内侧转杆;2、转动扣;3、连接杆;4、旋转齿轮;5、旋转底座;6、底板;7、压力传感装置;701、压力头;702、传感片;703、连接器;704、传输器;8、连接轴;9、转动轴;10、保护壳;11、连接线;12、联动轴;13、多型轮装置;1301、履带圈;1302、固定转盘;1303、联动盘;1304、履带盘;1305、联动转盘;1306、固定芯。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.请参阅图1
‑
6,本发明提供一种技术方案:一种工业生产机器人抓取装置,包括旋转抓手装置1,旋转抓手装置1的一侧外表面设置有压力传感装置7,压力传感装置7的一侧外表面设置有连接轴8,连接轴8的一侧设置有转动轴9,转动轴9的一侧设置有保护壳10,保护壳10下端外表面设置有转动扣2,转动扣2的一侧设置有连接线11,转动扣2下端外表面设置有连接杆3,连接杆3下端外表面设置有旋转齿轮4,旋转齿轮4一侧外表面设置有联动轴12,联动轴12的下端设置有旋转底座5,旋转底座5下端外表面设置有底板6,底板6一侧外表面设置有多型轮装置13。
18.旋转抓手装置1包括固定轴101、旋转套轴102、外侧转杆103与内侧转杆104,固定轴101的下端设置有旋转套轴102,旋转套轴102的下端设置有外侧转杆103,外侧转杆103的下端外表面设置有内侧转杆104,可以使得在抓取货物时高效的操作,便于抓取货物可以旋转位置,方便抓取的统一性能,便于调整,既保正了便捷性,又实现了所需的实用性功能。
19.压力传感装置7包括压力头701、传感片702、连接器703与传输器704,压力头701的一侧设置有传感片702,传感片702的一侧外表面设置有连接器703,连接器703的一侧外表面设置有传输器704,可以具备可以减少抓取力道控制不准确给快递件带来损伤的优点,解决了目前的分拣机器人抓取装置夹持的力道一般难以准确控制,使用灵活,容易拆卸。
20.多型轮装置13包括履带圈1301、固定转盘1302、联动盘1303、履带盘1304、联动转盘1305与固定芯1306,履带圈1301的内壁设置有固定转盘1302,固定转盘1302的一侧设置有联动盘1303,联动盘1303的一侧设置有联动转盘1305,联动转盘1305的一侧设置有履带
盘1304,联动盘1303的一侧设置有固定芯1306,遇到减速带和斜坡也可以做到行驶稳定的效果,保证运送货物的稳定性,减少损失,减少维修的难度,操作方便简单。
21.固定轴101与旋转套轴102之间设有插槽,且固定轴101下端外表面通过插槽与旋转套轴102上端外表面转动连接,外侧转杆103与内侧转杆104之间设有槽孔,且外侧转杆103下端外表面通过槽孔与内侧转杆104上端外表面转动连接,在实际操作中,该一种工业生产机器人抓取装置,在使用时,旋转抓手装置1可以使得在抓取货物时高效的操作,便于抓取货物可以旋转位置,方便抓取的统一性能,便于调整,具有实用性,固定轴101可以旋转固定,通过后端的转动系统带动操作,提供转向动力,一侧的旋转套轴102可以旋转,带动一侧的外侧转杆103与内侧转杆104转动,便于抓取货物,使得货物抓取能够及时调整,操作便捷,具有高效的实用性,操作简单,具有高效实用性,连接效率极大的提升,且拆卸时相应的更加方便。
22.压力头701与传感片702之间设有螺槽,且压力头701一侧外表面通过螺槽与传感片702一侧外表面可拆卸连接,连接器703与传输器704之间设有槽口,且连接器703一侧外表面通过槽口与传输器704一侧外表面可拆卸连接,在实际操作中,该一种工业生产机器人抓取装置,在使用时,压力传感装置7在使用时可以具备可以减少抓取力道控制不准确给快递件带来损伤的优点,解决了目前的分拣机器人抓取装置夹持的力道一般难以准确控制,极大地具有实用性,压力头701可以感触抓手的力度,通过抓手抓取货物来反馈给传感片702,进一步的分析,调节力度,一侧的连接器703可以连接固定插件,后端的传输器704通过连接线11传输给系统分析受压力值,便于感知抓取货物的压力,使得整个结构形成一体且自动化程度高,大大提高工作效率,具有实用性。
23.履带圈1301与固定转盘1302之间设有转槽,且履带圈1301内壁外表面通过转槽与固定转盘1302外壁外表面转动连接,联动盘1303与固定芯1306之间设有卡槽,且联动盘1303一侧外表面通过卡槽与固定芯1306一侧外表面可拆卸连接,履带盘1304与联动转盘1305之间设有卡槽,且履带盘1304一侧外表面通过卡槽与联动转盘1305一侧外表面转动连接,在实际操作中,该一种工业生产机器人抓取装置,在使用时,多型轮装置13可以使得在行驶过程,哪怕遇到减速带和斜坡也可以做到行驶稳定的效果,保证运送货物的稳定性,减少损失,履带圈1301便于行驶,稳定又安全,固定转盘1302通过电机联动提供动力来源,一侧的联动转盘1305可以提供动能转动,一侧的联动盘1303便于整体行驶,保证稳定安全,固定芯1306固定装配,一侧的履带盘1304使得行驶主动力得到高效安全稳定的效果,操作方便简单,便于拆卸,具有实用性,使用方便安全。
24.转动扣2与连接杆3之间设有转动槽,且转动扣2一侧外表面通过转动槽与连接杆3一侧外表面可拆卸连接,旋转底座5与底板6之间设有转动槽,且旋转底座5下端外表面通过转动槽与底板6上端外表面转动连接,带来了极大的实用性。
25.本实施例的工作原理:在使用时,根据图1所示,该设备通过多型轮装置13可以使得在行驶过程,哪怕遇到减速带和斜坡也可以做到行驶稳定的效果,保证运送货物的稳定性,上端的旋转底座5可以固定旋转位置,做到任意位置的旋转,上端的旋转齿轮4可以旋转操作,一侧的连接杆3做到固定作用,通过压力传感装置2在使用时可以具备可以减少抓取力道控制不准确给快递件带来损伤的优点,解决了目前的分拣机器人抓取装置夹持的力道一般难以准确控制,极大地具有实用性,前端的旋转抓手装置1可以使得在抓取货物时高效
的操作,便于抓取货物可以旋转位置,方便抓取的统一性能,便于调整,下端的多型轮装置13可以使得在行驶过程,哪怕遇到减速带和斜坡也可以做到行驶稳定的效果,保证运送货物的稳定性,具有实用性,操作方便。
26.根据图2
‑
5所示,固定轴101可以旋转固定,通过后端的转动系统带动操作,提供转向动力,一侧的旋转套轴102可以旋转,带动一侧的外侧转杆103与内侧转杆104转动,便于抓取货物,使得货物抓取能够及时调整,操作便捷,具有高效的实用性,操作简单,具有高效实用性,连接效率极大的提升,且拆卸时相应的更加方便,便于抓取货物可以旋转位置,方便抓取的统一性能,便于调整,具有实用性。
27.根据图3所示,压力头701可以感触抓手的力度,通过抓手抓取货物来反馈给传感片702,进一步的分析,调节力度,一侧的连接器703可以连接固定插件,后端的传输器704通过连接线11传输给系统分析受压力值,便于感知抓取货物的压力,使得整个结构形成一体且自动化程度高,解决了目前的分拣机器人抓取装置夹持的力道一般难以准确控制,大大提高工作效率,具有实用性。
28.根据图4
‑
6所示,履带圈1301便于行驶,稳定又安全,固定转盘1302通过电机联动提供动力来源,一侧的联动转盘1305可以提供动能转动,一侧的联动盘1303便于整体行驶,保证稳定安全,固定芯1306固定装配,一侧的履带盘1304使得行驶主动力得到高效安全稳定的效果,操作方便简单,便于拆卸,保证运送货物的稳定性,减少损失,具有实用性,使用方便安全。
29.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。