1.本发明涉及一种压铸机,具体是一种具有快捷调节模板平行度的压铸机。
背景技术:
2.压铸机在新机调试、生产发生飞料以及机器大修时都会涉及到动模与定模模面平行度调整的事项。动模与定模模面平行度调整时常规办法是在测量出模面哪个点相对其他点数据出入过大,拆卸掉对应方向上的的调节螺母压盖,启动调模动作,尾板在其他三个未拆卸调节螺母压盖的点向后位移,从而达成调整动模与定模平行度的目的。该方法需要拆卸调节螺母压盖和大量螺钉,并且调节螺母压盖重量和体积都比较大,而且通常想要调平模面需要拆卸多个点的调节螺母压盖,甚至需人工扳动调节螺母来达到微调动模的位移。往往需要专业调试人员2人以上工作2
‑
3小时以上,人工和时间成本巨大。并且调整的动模平行度精度和调试人员的技能水平有关。针对以上情况,开发出一种无需太多专业技能,普通操作者都能执行,快捷,结构简单,电动自动调整的动模平行度的机构就势在必行。
技术实现要素:
3.本发明的目的旨在提供一种具有快捷调节模板平行度的压铸机,其具有操作简单,调节便捷,在调节过程中不需要拆卸设备上的配件,以减轻调试人员工作负担,克服现有技术中的不足之处。
4.按此目的设计的一种具有快捷调节模板平行度的压铸机,包括通过若干个导柱串联连接的尾板、动模板、定模板,尾板、动模板通过机铰组件相连,尾板上设有若干个平行度调节位,每个平行度调节位上设有与导柱相连的调节件,调节件部分与导柱部分活动配合,尾板上还设有传动机构,每个平行度调节位的调节件与传动机构之间均设有过渡传动结构,传动机构在工作过程中带动过渡传动结构活动,进而带动调节件、尾板、动模板沿导柱轴向运动,过渡传动结构上配设有轴向分离部,在动模板、定模板之间的平行度调节过程中,过渡传动结构通过轴向分离部脱离传动机构,与该过渡传动结构对应的平行度调节位保持静止。
5.传动机构包括提供动力的驱动部、主动齿轮、被动齿轮,驱动部上设有与主动齿轮相连的输出轴,主动齿轮、被动齿轮、过渡传动结构依次啮合,调节件另一部分与过渡传动结构啮合。
6.每个过渡传动结构包括与被动齿轮啮合的过渡齿轮,每个平行度调节位上对应过渡齿轮设有安装轴,轴向分离部包括与安装轴相连的导向轴,过渡齿轮配设(配备设置)有挪动部,过渡齿轮通过挪动部从安装轴移动至导向轴上,以脱离被动齿轮。
7.挪动部包括拆装式配设在过渡齿轮上的工程把手。
8.导向轴一端通过螺纹与安装轴相连。
9.尾板上对应每个调节件均设有压盖,压盖固定在尾板上并包覆调节件,且压盖对应过渡齿轮轴向脱离被动齿轮的位置上设有避让缺口。
10.调节件部分与导柱部分为梯形螺纹配合;调节件另一部分设有与过渡齿轮相啮合的传动齿轮。
11.尾板上设有若干个用于支承被动齿轮的支撑轴,被动齿轮设有安装槽,每个支撑轴贯穿并环绕安装槽设置,支撑轴上设有限位块,限位块与支撑轴固定连接并与被动齿轮部分形成卡设,限位块与尾板之间的间隔形成卡槽,以使被动齿轮限位在卡槽上。
12.平行度调节位设有四个,且四个平行度调节位分别沿尾板的角位处设置。
13.在模板平行度调节过程中,还配设测量动模板与定模板的模面之间四个角位点直线距离的打表工具。
14.本发明的有益效果如下:
15.过渡传动结构通过轴向分离部脱离传动机构,与该过渡传动结构对应的平行度调节位保持静止,能够使所有平行度调节位同时进行调节,或者使任意其中一个、两个、或三个的平行度调节位进行调节,故若出现某个平行度调节位与其它平行度调节位平行度数据调整差异时,不需要拆卸设备上的配件,就能达到调节其它平行度调节位,进而实现动模板与定模板之间平行度调节。
16.工程调试人员通过工程把手将某个过渡齿轮放置于导向轴上时,该过渡齿轮脱离被动齿轮,以断开与该过渡齿轮、调节件、被动齿轮之间传动联系,使驱动部启动时,该处调节件不转动,其它未脱出点的调节件则继续转动来调整动模板不同点位移,从而达到调节动模板与定模板平行度的要求,不需要拆卸压盖和大量螺栓,减轻工程调试人员的工作负担,节省调节时间,亦不需要人工扳动调节件来达到微调动模板的位移。故具有快捷调节模板平行度的压铸机无需太多专业技能,普通工程调试人都能执行,具有调节快捷,结构简单,并具备电动自动调整的动模平行度的特点。
附图说明
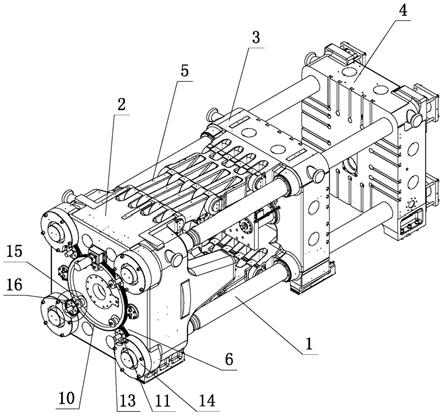
17.图1为本发明一实施例压铸机平面结构示意图。
18.图2为本发明一实施例压铸机立体结构示意图。
19.图3为图2中局部放大图。
20.图4为本发明一实施例压铸机部分装配分解结构示意图。
21.图5为本发明一实施例压铸机另一方位立体结构示意图。
22.图6为本发明一实施例尾板的平面结构示意图。
具体实施方式
23.下面结合附图及实施例对本发明作进一步描述。
24.参见图1
‑
图6,一种具有快捷调节模板平行度的压铸机,包括通过若干个导柱1串联连接的尾板2、动模板3、定模板4,尾板2、动模板3通过机铰组件5相连,尾板2上设有若干个平行度调节位6,每个平行度调节位6上设有与导柱1相连的调节件7,调节件7部分与导柱1部分活动配合,尾板2上还设有传动机构,每个平行度调节位6的调节件7与传动机构之间均设有过渡传动结构,传动机构在工作过程中带动过渡传动结构活动,进而带动调节件7、尾板2、动模板3沿导柱1轴向运动,过渡传动结构上配设有轴向分离部,在动模板3、定模板4之间的平行度调节过程中,过渡传动结构通过轴向分离部脱离传动机构,与该过渡传动结
构对应的平行度调节位6保持静止,能够使所有平行度调节位6同时进行调节,或者使任意其中一个、两个、或三个的平行度调节位6进行调节,故若出现某个平行度调节位6与其它平行度调节位6平行度数据调整差异时,不需要拆卸设备上的配件,就能达到调节其它平行度调节位6,进而实现动模板3与定模板4之间平行度调节。
25.在本实施例中,尾板2、动模板3、定模板4的四个角位上均设有与导柱1相配的导柱孔。
26.传动机构包括提供动力的驱动部8、主动齿轮9、被动齿轮10,驱动部8上设有与主动齿轮9相连的输出轴8.1,主动齿轮9、被动齿轮10、过渡传动结构依次啮合,调节件7另一部分与过渡传动结构啮合。
27.在本实施例中,驱动部8为油马达,油马达通过油马达座与尾板7固定,油马达座通过螺栓固定在尾板7上。油马达座设有容置腔,容置腔包覆主动齿轮9,驱动部8的输出轴8.1插入容置腔并与主动齿轮9相连,输出轴8.1端头通过键槽与主动齿轮9配合连接。
28.每个过渡传动结构包括与被动齿轮10啮合的过渡齿轮11,每个平行度调节位6上对应过渡齿轮11设有安装轴12,轴向分离部包括与安装轴12相连的导向轴13,过渡齿轮11配设有挪动部,过渡齿轮11通过挪动部从安装轴12移动至导向轴13上,以脱离被动齿轮10。
29.挪动部包括拆装式配设在过渡齿轮11上的工程把手,工程调试人员通过工程把手将某个过渡齿轮11放置于导向轴13上时,该过渡齿轮11脱离被动齿轮10,以断开与该过渡齿轮11、调节件7、被动齿轮10之间传动联系,使驱动部8启动时,该处调节件7不转动,其它未脱出点的调节件7则继续转动来调整动模板3不同点位移,从而达到调节动模板3与定模板4平行度的要求,不需要拆卸压盖14和大量螺栓,减轻工程调试人员的工作负担,节省调节时间,亦不需要人工扳动调节件7来达到微调动模板3的位移。故具有快捷调节模板平行度的压铸机无需太多专业技能,普通工程调试人都能执行,具有调节快捷,结构简单,并具备电动自动调整的动模平行度的特点。
30.导向轴13一端通过螺纹与安装轴12相连。
31.参见图3,尾板2上对应每个调节件7均设有压盖14,压盖14固定在尾板2上并包覆调节件7,且压盖14对应过渡齿轮11轴向脱离被动齿轮10的位置上设有避让缺口14.1,使得过渡齿轮11能够顺利脱出安装轴12,断开过渡齿轮11与被动齿轮10的传动联系。
32.在本实施例中,调节件7两端面分别被尾板2导柱孔一面和压盖14的一面接触(压盖14、尾板2夹持调节件7),压盖14通过螺栓固定在尾板2上。
33.调节件7部分与导柱1部分为梯形螺纹配合;调节件7另一部分设有与过渡齿轮11相啮合的传动齿轮7.1。
34.尾板2上设有若干个用于支承被动齿轮10的支撑轴15,被动齿轮10设有安装槽,每个支撑轴15贯穿并环绕安装槽设置,支撑轴15上设有限位块16,限位块16与支撑轴15固定连接并与被动齿轮10部分形成卡设,限位块16与尾板2之间的间隔形成卡槽,以使被动齿轮10限位在卡槽上,防止被动齿轮10往外脱出。
35.在本实施例中,被动齿轮10通过支撑轴15、限位块16与压盖14的配合,使被动齿轮10固定在尾板2四个导柱孔的中央位置。
36.平行度调节位6设有四个,且四个平行度调节位6分别沿尾板2的角位处设置。
37.在模板平行度调节过程中,还配设测量动模板3与定模板4的模面之间四个角位点
直线距离的打表工具。
38.在本实施例中,驱动部8启动时,输出轴8.1转动,使主动齿轮9、被动齿轮10、四个过渡齿轮11、四个调节件7之间的传动链带动尾板2、机铰组件5、动模板3沿导柱1轴向方向位移。
39.参见图5、图6,在实际应用中,工程调试人员测量动模板3与定模板4平行度时,会对动模板3的a、b、c、d四个方位点与定模板4模面的直线距离进行打表,假设测量结果a点相对其他三个点位置差异大,工程调试人员会将对应尾板2a点的平行度调节位6进行调整,将导向轴13与安装轴12连接,连接后工程调试人员将过渡齿轮11从安装轴12转移到导向轴13上,从而脱离被动齿轮10,断开被动齿轮10与尾板2a点的平行度调节位6中调节件7的传动联系,在启动驱动部8后,尾板2a点位置由于脱开保持相对静止,尾板2b、c、d点位置发生位移,从而调整成尾板2a点位置的相近数据,达到调整动模板3与定模板4平行度目的。
40.上述为本发明的优选方案,显示和描述了本发明的基本原理、主要特征和本发明的优点。本领域的技术人员应该了解本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。