1.本技术涉及一种机器人装置,具体涉及一种遥控型自平衡驱动球形机器人。
背景技术:
2.针对不同环境中的探索与检测,科学家们研发出了各种不同的全地形机器人,适合在草地、沙漠、水面、平地和碎石等环境行驶。因为全地形机器人具有在各种环境中适应力强、动作敏捷、控制方便且工作效率高等优点,所以它们被广泛应用在极端环境里进行越障和寻物。
3.球形机器人是一种形状特殊的全地形运动型机器人,可以凭借滚动移动的方式适应复杂的地形环境,和普通的轮式移动机器人相比,具有更强的适应复杂环境的能力。球形机器人行动灵活,不仅可以在平面、斜坡面上行驶,还可以在崎岖不平的地面,甚至是水面、泥泽地里行驶并且可以穿越管道和洞穴。
4.与轮式移动机器人相比,球形机器人的平衡性能和转弯性能更难以控制,本领域的科学家们为此已进行了许多研究。例如,于楠等在《一种独轮车式球形六足机器人结构设计》中披露以arduino uno r3开发板为主控制板,开发了一种独轮车式滚动的球形六足机器人的结构设计和控制平台,其以球形形状为基础,结合独轮车滚动运动与六足机器人的结构和运动特点,设计球形六足机器人模型,同时适应多种复杂地形的变化通过搭载样机对机器人的六足行走和自主滚动进行了实验研究。
5.李艳生等在《小型球形水底观测机器人设计分析与实现》中披露面向水底信息获取和环境观测需求,基于球状壳体抵抗水压能力强,转动水阻力小,便于姿态控制特点,提出球形水底观测机器人构型,由螺旋桨推进、姿态调节和复合滚动装置组成欠驱动六自由度水下移动平台,球壳作为密闭舱保护内部电子器件,结合重摆以滚动形式实现水底滚动。通过对机器人流体力学仿真计算出水动力系数并建立水下动力学方程,进一步对机器人的螺旋桨推进、飞轮转向和球壳滚动进行分析,得出球壳优化尺寸以及飞轮匹配惯量和球壳滚动特性。基于球形机器人水下移动平台和地面监控软件的水底观测系统架构,研制出球形水底观测机器人。
6.千承辉等在《可适应复杂地形的球形自平衡寻物机器人》中披露了一台可适应复杂地形、半径约为5cm的不倒翁式球形自平衡寻物机器人。它可以实现周围信息的采集、无线传输数据、无线充电等功能。为了精确控制其运动,采用位置式 pd和卡尔曼滤波等算法,在保持重心稳定的同时,抑制高斯白噪声,使机器人始终以水平视角输出图像信息,提高了采集数据的可靠性。经过测试,机器人可以在受到干扰后的3秒内恢复平衡,还可实现多台协同控制、超大面积寻物的功能,具有稳定的鲁棒性和比一般轮式机器人更强的抗干扰能力。
7.此外,公开号为cn1295907a且标题为“自主球形机器人”的中国发明专利申请披露了一种遥控并具有部分自主功能的球形机器人,其外部轮廓为球形,内部一台直流伺服电机通过传动改变活动质量块的位置产生重力矩驱动球体向前滚动;另一台直流伺服电机通
过调整滑块的位置实现平衡和转弯。利用各种传感器和遥控装置以及控制电路,可对球体进行无线遥控,实现球形机器人的停、转、平衡及沿所要求的轨迹运动。本发明可用于星球探测、运输、探险、救援、军事、娱乐等方面, 能够在沼泽、沙滩、冰雪地、水上及太空等环境作业。
8.公开号为cn110979500a且标题为“一种流体驱动的球形滚动机器人及其驱动方法”的中国发明专利申请指出目前球形机器人的驱动方式主要有小车驱动、配重驱动、形变驱动和风力驱动,均存在一定缺陷。该对比文献还披露了一种流体驱动的球形滚动机器人,包括控制盒、动力机构、球形外壳和平衡箱。动力机构包括环形管、第一重心调节块、第二重心调节块和隔板。控制盒内安装有油路模块。油路模块包括油箱、第一换向阀、第二换向阀、第一通断阀、第二通断阀、溢流阀和液压源。本发明利用液压传动方式,控制管内液体流动,从而驱动内部重心调节块运动,改变机器人质心位置,与传统球形机器人质心改变方式相比,结构更加简单可靠,运动更加平稳灵活。
9.公告号为cn205059780u的中国实用新型专利披露了一种球形机器人,包括球形外壳和内部驱动系统两部分,内部驱动系统设置在球形外壳内部,由无线接收控制装置、两个步进电机、电机驱动装置、圆形承重板、电池组、丝杠、丝杠螺母、丝杠轴承座、联轴器、配重块构成,其中一个步进电机的轴通过联轴器与球形外壳连接,驱动球形机器人前进或后退,另一个步进电机通过丝杠与配重块相连,通过电机转动改变配重块的位置,合成球体重心,来控制球体的滚动方向,同时该电机还具备校准球体的平衡位置的作用。
10.上述文献都采用了不同的方式来实现球形机器人的平衡和左右转向,但有的结构复杂,制造成本高,有的容易使配重块滑向一侧。为此,本领域持续需要开发一种遥控型自平衡驱动球形机器人。
技术实现要素:
11.本实用新型之目的就是为了克服上述现有技术存在的缺陷而提供一种运动灵活且越障爬坡能力强的遥控型自平衡驱动球形机器人。
12.本技术针对不同复杂地形下的环境探索与检测,设计了一种自平衡驱动的球形机器人,整个机器人由行走模块、重心调节模块以及平衡模块构成。本文所述的球形机器人通过球形外壳内部的单轮自平衡驱动方式利用万向轮的自重实现前后行驶,并通过重心调节模块的左右移动,调节机器人整体重心偏移位置,从而达到机器人在行驶过程中的转弯控制功能。机器人行驶万向轮采用万向轮的行驶,可以克服球形外壳由于形变所导致的壳体变形,并通过万向轮的速度控制实现机器人行进速度。通过重心调节模块调节重心偏移程度控制转弯幅度,并且能在保持平衡的同时进行运动与越障,机器人使用无线方式遥控行进。球形机器人不仅大幅提升了越障性能、并且所有的控制与动力器件均位于球体内部,通过内部驱动实现球体旋转,部件不易受到外界损坏。实验验证了该机器人的爬坡、越障和转弯等多种运动能力。
13.为了实现本实用新型之目的,本技术提供以下技术方案。
14.在第一方面中,本技术提供一种遥控型自平衡驱动球形机器人,该球形机器人包括球形外壳,其特征在于,还包括:
15.行走模块,用于驱动该球形机器人,所述行走模块包括万向轮、用于驱动该万向轮
的第一驱动电机以及沿着竖直方向设置的支撑柱,该第一驱动电机由第一电机驱动板驱动,该万向轮安装至该支撑柱上;
16.平衡模块,用于维持该球形机器人的动态平衡性和静态平衡性,所述平衡模块包括平衡杆、设置在该平衡杆上方且固定连接至该平衡杆的第一安装板以及设置在该平衡杆下方且固定连接至该平衡杆的第二安装板,所述平衡杆的纵向轴线穿过该球形机器人的球心,且所述平衡杆构造成能绕着该平衡杆的纵向轴线相对于所述球形外壳旋转;
17.重心调节模块,用于控制该球形机器人左右转向,所述重心调节模块包括沿着水平方向设置的带式输送装置、传动装置、用于驱动该传动装置的第二驱动电机以及固定设置在该带式输送装置上的配重块,该第二驱动电机由第二电机驱动板驱动;
18.无线接收控制装置,用于与外部遥控设备通讯并接收无线信号;以及,
19.控制器,所述控制器与所述无线接收控制装置、第一电机驱动板以及第二电机驱动板通讯;
20.电池;
21.其中,所述行走模块、所述重心调节模块、所述无线接收控制装置和所述电池都直接或间接地机械连接到所述平衡模块,且所述重心调节模块设置在所述平衡模块上方。
22.在第一方面的一种实施方式中,当所述球形机器人处于运动状态时,所述行走模块的支撑柱的纵向轴线与竖直方向形成夹角,夹角的大小与机器人行驶速度成正比。
23.在第一方面的一种实施方式中,所述平衡杆两端通过轴承固定到所述球形外壳上。在一种实施方式中,所述平衡杆的纵向长度可大于所述球形外壳的直径。在另一种实施方式中,所述平衡杆的纵向长度可小于或等于所述球形外壳的直径,使得球形机器人作为一个整体是密封的。
24.在第一方面的一种实施方式中,所述第一安装板和所述第二安装板均为含有安装孔的u型板材,以及其中第一安装板的开口朝上,所述第二安装板的开口朝下。
25.在第一方面的一种实施方式中,所述带式输送装置为履带,且所述传动装置为齿轮,所述齿轮设置在所述履带形成的闭环之内并与所述履带啮合。
26.在第一方面的一种实施方式中,所述无线接收控制装置为蓝牙接收装置,所述蓝牙接收装置接收外部遥控设备的控制指令,并将该控制指令传输给所述控制器,所述第一电机驱动板通过控制器输出的控制信号控制万象轮的速度与位置,所述第二电机驱动板通过控制器给出的控制信号控制带式输送装置的速度与位置。
27.在第一方面的一种实施方式中,所述遥控型自平衡驱动球形机器人还包括摄像头,所摄像头位于所述配重块上方。
28.在第一方面的一种实施方式中,所述遥控型自平衡驱动球形机器人还包括温度传感器、湿度传感器和红外传感器中的一种或多种。
29.在第一方面的一种实施方式中,所述球形外壳是透明的。
30.与现有技术相比,本技术的有益效果在于:(1)通过球形外壳内部的单轮自平衡驱动方式、利用驱动轮的自重实现球形机器人的前后行驶;(2)通过重心调节模块的左右移动,调节机器人整体重心偏移位置,从而达到机器人在行驶过程中的转弯控制功能;(3)机器人行驶驱动轮采用万向轮的行驶,可以克服球形外壳由于形变所导致的壳体变形,并通过万向轮的速度控制实现机器人行进速度,通过重心调节模块调节重心偏移程度控制转弯
幅度;(4)整个机器人的驱动、控制以及电源系统均包涵在球形壳体内部,球形密封的设计可以使得机器人在涉水等场合下稳定运行。
附图说明
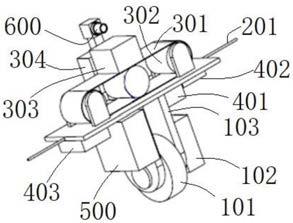
31.图1为根据本实用新型的一种实施方式的球形机器人的立体结构示意图。在该图中,为了简便,没有显示球形机器人内部的详细结构。
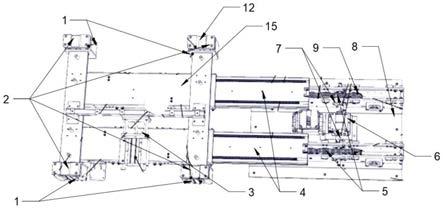
32.图2为根据本实用新型的一种实施方式的球形机器人的另一角度的立体结构示意图。在该图中,为了简便,没有显示球形外壳的结构。
33.图3为根据本实用新型的一种实施方式的球形机器人的另一角度的立体结构示意图。在该图中,为了简便,没有显示球形外壳的结构。
34.图4为根据本实用新型的一种实施方式的行走模块的示意图。图中的箭头显示球形机器人和万向轮的转动方向。从左至右分别展示了驱动轮分别在速度较大至速度较小时,行驶驱动轮的支撑柱与竖直方向的夹角。驱动轮速度越大、支撑柱与竖直方向夹角越大。
35.图5为根据本实用新型的一种实施方式的平衡模块的端面示意图。
36.在上述附图中,各附图标记含义如下:
[0037]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
球形机器人;
[0038]
11
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
球形外壳;
[0039]
101
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
万向轮;
[0040]
102
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一驱动电机;
[0041]
103
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
支撑柱;
[0042]
201
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
平衡杆;
[0043]
202
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第一安装板;
[0044]
203
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二安装板;
[0045]
301
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
带式输送装置;
[0046]
302
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
传动装置;
[0047]
303
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
第二驱动电机;
[0048]
304
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
配重块;
[0049]
401
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
arduino uno控制开发板;
[0050]
402
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
l298n电机驱动板;
[0051]
403
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
蓝牙接收装置;
[0052]
500
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
电池;
[0053]
600
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
摄像头。
具体实施方式
[0054]
除非另作定义,在本说明书和权利要求书中使用的技术术语或者科学术语应当为本实用新型所属技术领域内具有一般技能的人士所理解的通常意义。本文中列举的所有的从最低值到最高值之间的数值,是指当最低值和最高值之间相差两个单位以上时,最低值与最高值之间以一个单位为增量得到的所有数值。在本发明创造的描述中,需要理解的是,
术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明创造和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明创造的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明创造的描述中,除非另有说明,“多个”的含义是两个或两个以上。
[0055]
在本发明创造的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明创造中的具体含义。
[0056]
以下将结合附图描述本实用新型的具体实施方式,需要指出的是,在这些实施方式的具体描述过程中,为了进行简明扼要的描述,本说明书不可能对实际的实施方式的所有特征均作详尽的描述。在不偏离本实用新型的精神和范围的情况下,本领域技术人员可以对本实用新型的实施方式进行修改和替换,所得实施方式也在本实用新型的保护范围之内。
[0057]
本技术面向全地形行驶的机器人应用,针对转弯、爬坡、越障等一体化问题,设计了一款通过自平衡式驱动行驶、控制转弯的球形机器人,通过内部重心调节装置控制机器人转弯、利用万向轮的速度来调节机器人行驶快慢,将机器人部件密封于球形课题内部,通过两个电机的控制便可实现机器人整体的灵活运动、越障与转弯等,并通过在多种环境下测试,验证了该设计的可行性。
[0058]
首先参考图1
‑
3,在一种实施方式中,本文所述的球形机器人1可包括球形外壳11以及设置在该球形外壳11之内的行走模块、平衡模块、重心调节模块、无线接收控制模块以及电池。在本文所述的球形机器人1中,行走模块用于驱动该球形机器人,平衡模块用于维持该球形机器人的动态平衡性和静态平衡性,重心调节模块用于控制该球形机器人左右转向,无线接收控制装置用于与外部遥控设备通讯以及控制第一驱动电机和第二驱动电机的电机控制器的转速和转动方向,且电池用于给驱动电机和控制装置提供电源。在该实施方式中,所述行走模块、所述重心调节模块、所述无线接收控制装置和所述电池都直接或间接地机械连接到所述平衡模块,且所述重心调节模块设置在所述平衡模块上方。
[0059]
在一种实施方式中,所述行走模块包括万向轮101、用于驱动该万向轮的第一驱动电机102以及沿着竖直方向设置的支撑柱103,该万向轮101安装至该支撑柱 103上。行走模块主要由万向轮和驱动电机组成,是机器人的主要驱动装置,保证机器人的正常驱动。考虑到机器人转向问题,故将行驶万向轮用万向轮,以防转向时行驶万向轮轮胎卡住的问题,并且可以克服球形外壳由于形变所导致的壳体变形。通过外部遥控设备例如手柄控制万向轮的自重实现球形机器人的前后行驶。为了增加轮胎与球壳之间的摩擦力,故选用直径较大的万向轮,选用直径为10
‑
12 厘米,优选地为11cm,宽为2
‑
4厘米,优选地为3,并增加了球壳滚动的动力。为了控制重心的平衡,将万向轮安装在稍前的位置。换句话说,从侧面看时,支撑柱 103的纵向轴线通过球形外壳1的球心,且可沿着球心枢轴转动,而万向轮的圆心则在
支撑柱103的纵向轴线前方。如图4所示,从左至右分别展示了万向轮分别在速度较大至速度较小时,行驶万向轮的支撑柱与竖直方向的夹角。这个夹角可在 0
°‑
90
°
之间变化,且万向轮速度越大,支撑柱与竖直方向夹角越大。
[0060]
需要指出的是,支撑柱103包括对称的两根支撑杆,且支撑柱103可枢轴转动地连接到平衡模块的平衡杆201。在一种具体实施方式中,支撑住103可为两块带有安装孔的安装板,可将第一驱动电机102安装至该支撑住103的任一安装板上。
[0061]
在一种实施方式中,所述平衡模块可包括平衡杆201、设置在该平衡杆上方且固定连接至该平衡杆201的第一安装板202以及设置在该平衡杆下方且固定连接至该平衡杆201的第二安装板203,所述平衡杆201的纵向轴线穿过该球形机器人的球心,且所述平衡杆201构造成能绕着该平衡杆的纵向轴线相对于所述球形外壳旋转。在一种具体实施方式中,平衡杆201通过轴承固定到球形外壳11两侧,通过圆心位置贯穿整个球壳当中。将外接设备安装在平衡杆的左右两端并保证平衡杆左右两端的重量相同,平衡杆两侧安装轴承,保证球体内部架构时刻垂下,维持了机器人的动态与静态平衡性。在一种具体实施方式中,如图5所示,所述第一安装板 202和所述第二安装板203均为含有安装孔的u型板材,以及其中第一安装板的开口朝上,所述第二安装板的开口朝下,平衡杆201则可为一根横截面为圆形的铁杆。
[0062]
回到图1
‑
3,所述重心调节模块包括沿着水平方向设置的带式输送装置301、传动装置302、用于驱动该传动装置的第二驱动电机303以及固定设置在该带式输送装置上的配重块304。在一种具体实施方式中,所述带式输送装置为履带,且所述传动装置为齿轮,所述齿轮设置在所述履带形成的闭环之内并与所述履带啮合。在一种优选的实施方式中,所述履带宽度为18
‑
22厘米,优选地为20厘米,且所述履带宽度为1
‑
2厘米,优选地为1.5厘米。在一种具体实施方式中,重心调节模块包含履带、配重块、齿轮以及第二驱动电机。重心调节模块安装在平衡杆的上部,配重块固定在履带上,履带通过外部遥控设备如手柄控制可以左右移动,使得配重块随之左右移动,以调节球形机器人的重心位置。从而达到机器人左转弯或右转弯的功能。使用履带的主要原因是使转弯更为平稳,在原本的双轮重心调节机构中,调节机构的轮子常常因为无法固定而滑向一侧。所以改用了履带,使转弯可以更为平稳和精准。
[0063]
在一种实施方式中,本文所述的所述无线接收控制装置包括arduino uno控制开发板、l298n电机驱动板和蓝牙接收装置。它们的工作原理和操作细节是本领域的常规知识,在此不再赘述。
[0064]
在另一种实施方式中,本文所述的遥控型自平衡驱动球形机器人还包括摄像头,所摄像头位于所述配重块上方。摄像头可以始终保持处于球形机器人的正上方,用于监测前方状况。
[0065]
在另一种实施方式中,本文所述的遥控型自平衡驱动球形机器人,其特征在于,还包括温度传感器、湿度传感器和红外传感器中的一种或多种。
[0066]
实施例1
[0067]
该实施例1涉及一种球形机器人。该球形机器人的具体参数如下所述。
[0068]
为控制机器人整体重量,机器人的整体采用vex的铝制连接件搭建,为了保持机器人的平衡性,选用的铝制连杆长度与每个模块相对应,铝制连杆的总体长度与球壳的大小
相互贴切,能够适应在球壳当中,根据重心调节模块的大小选取相应的履带,根据图3的设计以及淘宝可以参考、购置的设备、模块等,将机器人设计的参数制定如下所述。
[0069]
考虑到机器人在爬坡及越障时需要较大的动力,故选取马力较大的电机以及所适应的电池,机器人在环境中探索与检测需要用摄像头观察四周环境的情况,摄像安装在球壳中体积不宜过大,故选用体积小、清晰度较大、待机时间长的摄像头观察,基于上述设计部件选型如下:
[0070]
电机参数:额定电压为7.2v,自由速度为100rpm/160rpm,自由电流为0.37a,失速电流为4.8a;
[0071]
摄像头参数:1080p;
[0072]
电源:9.6v;
[0073]
控制开发板:arduino uno;
[0074]
电机驱动板:l298n;
[0075]
遥控手柄:ps2。
[0076]
最终搭建成的球形机器人参数如下:
[0077]
球壳半径:15cm;
[0078]
平衡杆长度:27cm;
[0079]
行驶驱动轮半径:5.5cm;
[0080]
履带长度:20cm;
[0081]
履带宽度:1.5cm;
[0082]
设计重量:1.5kg;
[0083]
配重块重量:500g。
[0084]
对搭建的球形机器人进行行走能力测试,当路面为大理石路时,行走速度为 0.80m/s;当路面为柏油路时,行走速度为0.75m/s;当路面为草地时,行走速度为0.60m/s;以及,当路面为方形瓷砖时,行走速度为0.62m/s。
[0085]
对搭建的球形机器人进行转弯能力测试,发现其最大转弯半径为1.3米,最小转弯半径为0.45米。
[0086]
对搭建的球形机器人进行越障能力测试,障碍主要分为凸障碍与凹障碍两种障碍组成,记录下可以攀爬的凹凸障碍的最大宽度和最高高度。根据在路面上不同的凹障碍进行测试并得出机器人所能通过凹障碍的最大宽度为14.5厘米。根据在路面上不同的凸障碍进行测试并得出机器人所能通过凸障碍的最大宽高度为3cm。
[0087]
总而言之,本技术披露了一种自平衡驱动的球形机器人,该机器人有着良好的动态和静态平衡性,并具有转弯、爬坡、越障等能力,球形体里空间相对较大,各个系统置于球体内受到保护,可靠性高。同时,可以在球内安装各种传感器,温度传感器、湿度传感器、红外传感器以实现各种环境数据的收集。
[0088]
上述对实施例的描述是为了便于本技术领域的普通技术人员能理解和应用本技术。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其它实施例中而不必付出创造性的劳动。因此,本技术不限于这里的实施例,本领域技术人员根据本技术披露的内容,在不脱离本技术范围和精神的情况下做出的改进和修改都本技术的范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。