1.本公开具体公开机器人技术领域,具体涉及一种可在写字楼消防楼梯通道使用的四足机器人。
背景技术:
2.机器人是一种能够半自主或全自主工作的智能机器,随着社会的不断发展,机器人广泛运用于各个领域当中。
3.现有的四足机器人在消防领域中使用时,由机器人工作对写字楼楼梯通道中进行检测,申请号为cn201922068629.0的一种可在写字楼消防楼梯通道使用的四足机器人的公开文件中公开了一种机器人;
4.然而现有的机器人高度是固定的,且不会太高,会使检测烟雾的传感器高度较低,因烟雾会向上方汇集,会使下方的烟雾的浓度较低,导致传感器检测下方时存在一定的误差,存在发生火灾时无法发现的问题,为此,我们提出一种可在写字楼消防楼梯通道使用的四足机器人。
技术实现要素:
5.鉴于现有技术中的上述缺陷或不足,本技术旨在提供一种增加检测精确度的可在写字楼消防楼梯通道使用的四足机器人,包括:机器人本体;
6.所述安装箱安装在机器人本体顶部的右侧壁上,所述安装箱内腔顶部插有检测机构,所述安装箱内腔底部安装有安装套管,所述安装套管内腔顶部滑动插有推杆,所述推杆顶端与检测机构底部壁固定连接,
7.其中,所述安装套管内腔底部安装有第一电磁铁,所述推杆底端安装有磁块。
8.根据本技术实施例提供的技术方案,所述安装套管包括固定安装在安装箱内腔底部的下套体,所述下套体内腔顶部螺接有上套体,所述推杆底端滑动插在上套体的内腔中。
9.根据本技术实施例提供的技术方案,所述机器人本体顶部的左侧壁安装有收放套,所述收放套内腔顶部滑动插有挡杆,所述挡杆底端安装有第二磁块,所述收放套内腔底部安装有第二电磁铁。
10.根据本技术实施例提供的技术方案,所述挡杆左侧壁开设有安放槽,所述安放槽内腔右侧通过弹性件滑动插有移动板。
11.根据本技术实施例提供的技术方案,所述安放槽内腔右侧安装有触碰开关,所述触碰开关分别与第二电磁铁、第一电磁铁电性连接。
12.根据本技术实施例提供的技术方案,所述安放槽与触碰开关的连接部位开设有安装槽,所述安装槽内腔左侧滑动安装有安装板,所述触碰开关安装在安装板的左侧壁上,所述安装板右侧壁与安装槽内腔之间安装有弹性垫。
13.与现有技术相比,本技术的有益效果是:装置中通过第一电磁铁通电工作,产生磁力,与第一磁块的磁力相同,使推杆带着检测机构上移,并且与第一电磁体连接的电源电流
方向是交替变化的,使推杆可以带着检测机构上下往复移动,使检测机构的高度不断在改变,避免检测设备长期处于下方而影响检测的精确度,增加设备使用的安全性。
附图说明
14.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本技术的其它特征、目的和优点将会变得更明显:
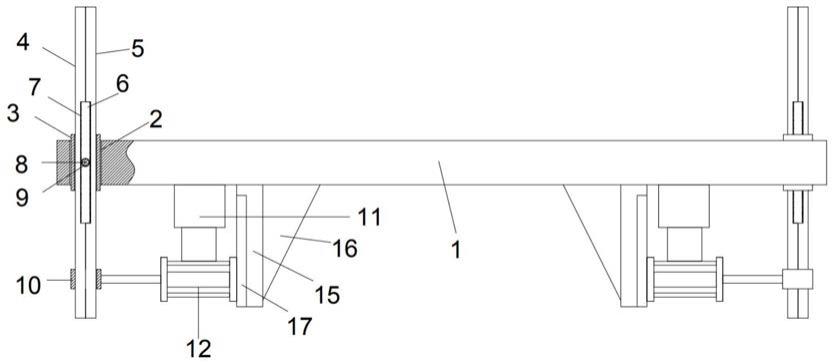
15.图1为本技术结构示意图;
16.图2为本技术收放套与挡杆连接结构示意图;
17.图3为本技术a处结构放大示意图。
18.图中:1、机器人本体;2、安装箱;3、安装套管;31、下套体;32、上套体;4、推杆;5、检测机构;6、收放套;7、挡杆;8、移动板;9、安放槽;10、安装槽;11、安装板;12、触碰开关;13、弹性垫。
具体实施方式
19.下面结合附图和实施例对本技术作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
20.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
21.诚如背景技术中所提到的,针对于现有技术中现有的机器人高度是固定的,且不会太高,会使检测烟雾的传感器高度较低,因烟雾会向上方汇集,会下方的烟雾的浓度较低,导致传感器检测下方时存在一定的误差,存在发生火灾时无法发现的问题,本公开公开一种可在写字楼消防楼梯通道使用的四足机器人,
22.实施例1:
23.请参阅图1,包括:机器人本体1,机器人本体1是指四足机器人,用于在消防楼梯通道中移动的设备;
24.安装箱2安装在机器人本体1顶部的右侧壁上,安装箱2内腔顶部插有检测机构5,安装箱2内腔底部安装有安装套管3,安装套管3内腔顶部滑动插有推杆4,推杆4顶端与检测机构5底部壁固定连接,
25.其中,安装套管3内腔底部安装有第一电磁铁,推杆4底端安装有磁块,在设备工作的过程中,第一电磁铁通电工作,产生磁力,与第一磁块的磁力相同,使推杆4带着检测机构5上移,并且与第一电磁体连接的电源电流方向是交替变化的,使推杆4可以带着检测机构5上下往复移动,使检测机构5的高度不断在改变,避免长期处于下方而影响检测的精确度,且第一电磁铁与第一磁块在图中并未画出,检测机构5是由烟雾传感器和声光传感器组成的;
26.请参阅图1,安装套管3包括固定安装在安装箱2内腔底部的下套体31,下套体31内腔顶部螺接有上套体32,推杆4底端滑动插在上套体32的内腔中,转动上套体32,使上套体32可以上移,使安装套管3的长度改变,从而可以调整推杆4向上移动的高度,从而能够改变检测机构5上移的高度。
27.实施例2:
28.请参阅图1和图2,在实施例1的基础上,机器人本体1顶部的左侧壁安装有收放套6,收放套6内腔顶部滑动插有挡杆7,挡杆7底端安装有第二磁块,收放套6内腔底部安装有第二电磁铁,第二磁块与第二电磁铁都未在图中画出,挡杆7左侧壁开设有安放槽9,安放槽9内腔右侧通过弹性件滑动插有移动板8,设备通电工作时,也对第二电磁铁供电,产生磁力与第二磁块相排斥,使挡杆7上移,由挡杆7在前方进行探路,使障碍与检测机构5发生碰撞的几率降低,由弹性件伸缩,使移动板8在安放槽9的内腔中左右移动,起到一个减小冲击力的效果;
29.请参阅图2和图3,安放槽9内腔右侧安装有触碰开关12,触碰开关12分别与第二电磁铁、第一电磁铁电性连接,在挡杆7碰到障碍物时(障碍物是指高处的障碍物),会使移动板8移动,按压触碰开关12,使第一电磁铁与第二电磁铁断电,使挡杆7与检测机构5下移,使设备可以穿过障碍物,安放槽9与触碰开关12的连接部位开设有安装槽10,安装槽10内腔左侧滑动安装有安装板11,触碰开关12安装在安装板11的左侧壁上,安装板11右侧壁与安装槽10内腔之间安装有弹性垫13,弹性垫13为橡胶材质的,具有一定的弹性,使移动板8按压触碰开关12时,对触碰开关12造成的冲击力减小;
30.相对于实施例1增加了收放套6与挡杆7等部件,由挡杆7在前方进行探路,使障碍与检测机构5发生碰撞的几率降低,对检测机构5进行保护。
31.以上描述仅为本技术的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本技术中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本技术中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。