1.本发明涉及机器人技术领域,具体涉及一种机械臂末端执行器快速接口装置。
背景技术:
2.随着宇宙飞船和空间站的在轨飞行任务逐渐增加,未来的空间活动将包括大量的空间生产、装配、维修等作业。由于太空环境相对恶劣,不可能所有的工作都依靠航天员完成,必须充分利用空间机器人技术和无线通信遥控技术,完成部分工作。
3.机械臂是空间站平台和空间机器人的重要组成部分。机械臂末端执行器是机械臂与外界进行交互的最后环节和执行部件,是机械臂用来直接执行各种操作和任务的器件,它关乎机械臂能否快速且有效的完成指定的任务。执行不同的工作任务往往需要不同的末端执行器,是否能够快速、稳定、灵活地更换机械臂末端执行器成为现今机械臂末端执行器以及机械臂设计的重要指标。
4.但目前的机械臂末端执行器大都为固定的,无法快速更换,一般需要人工手动更换不同的机械臂末端执行器,这十分影响工作效率。
技术实现要素:
5.为解决上述技术缺陷,本发明的技术解决方案是:一种机械臂末端执行器快速接口装置,包括第一配合部、第二配合部和第三配合部,第一配合部安装在机械臂末端关节上,第二配合部安装在机械臂末端执行器上,第一配合部和所述第二配合部可拆卸连接;
6.第一配合部包括伸缩套、限位片、锁定开关组件;第二配合部包括底座圆盘、延长圆柱体、中间圆盘、连接柱一体连接;第三配合部包括工具存放架、锁定架、解锁架、解锁复位弹簧和拨动柱;
7.底座圆盘通过六个螺栓与末端执行器固定连接;连接柱的侧面设有定位孔,用于与定位销对接;
8.锁定开关组件包括锁定拨杆、锁定端头、锁定弹簧和定位销;锁定端头与所述锁定拨杆固定连接,定位销与锁定端头通过转动副连接,锁定弹簧一端与定位销固定连接,另一端与锁定端头固定连接,使锁定端头紧贴伸缩套外表面;伸缩套内部有空腔,两侧开口宽窄不同,限位片固定连接在所属伸缩套的宽侧,伸缩套窄侧开口的形状、大小与连接柱的横截面相同;伸缩套的窄侧上壁有开口,开口到窄侧口的距离与所述定位孔到中间圆盘的距离相等,定位销与开口组成滑动副;
9.锁定架与工具存放架固定连接,解锁复位弹簧一端连接工具存放架,一端连接解锁架,拨动柱固定连接在锁定架上。
10.进一步地,所述定位销的端部为斜面。
11.进一步地,所述解锁架上也固定连接有一个解锁拨动柱。
12.进一步地,所述伸缩套的窄侧内壁设有光滑斜面。
13.进一步地,所述连接柱的形状为长方体。
14.进一步地,所述连接柱的横截面是圆角矩形。
15.进一步地,所述连接柱采用空心结构。
16.进一步地,所述定位孔设在所述连接柱的长边侧面上。
17.进一步地,所述定位孔有两个,且对称设置。
18.进一步地,未进行解锁和锁紧操作时,所述解锁架与所述锁定架互相接触。
附图说明
19.附图用来提供对本发明的进一步理解,构成本技术的一部分,本发明的实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附
20.图中:
21.图1为锁定开关组件的锁紧状态平面图;
22.图2为锁定开关组件的解锁状态平面图;
23.图3为机械臂与末端执行器对接的接口装置平面图;
24.图4为第二配合部的结构视图;
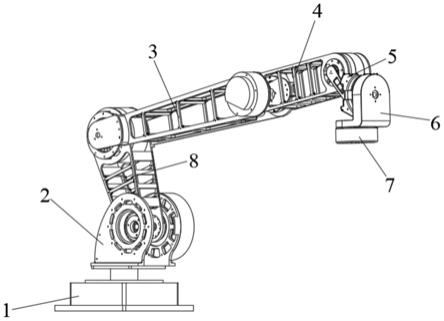
25.图5为机械臂末端执行器快速接口装置的外部结构视图。
具体实施方式
26.为使本发明的方案更加明了,下面结合附图说明和具体实施例对本发明作进一步描述:
27.如图1~5所示,一种机械臂末端执行器快速接口装置,包括第一配合部、第二配合部和第三配合部,第一配合部安装在机械臂末端关节01上,第二配合部安装在机械臂末端执行器02上,第一配合部和第二配合部可拆卸地连接。
28.第一配合部包括伸缩套101、限位片102、锁定开关组件;第二配合部包括一体地连接的底座圆盘201、延长圆柱体202、中间圆盘(203)、连接柱204;第三配合部包括工具存放架301、锁定架302、解锁架303、解锁复位弹簧304和拨动柱305。
29.底座圆盘201通过六个螺栓与末端执行器02固定连接。连接柱204的侧面设有定位孔205。锁定开关组件包括锁定拨杆103、锁定端头104、锁定弹簧105和定位销106;锁定端头104与锁定拨杆103固定连接,定位销106与锁定端头104通过转动副连接,锁定弹簧105一端与定位销106固定连接,另一端与锁定端头104固定连接,使锁定端头104紧贴伸缩套101外表面;伸缩套101内部有空腔,两侧开口宽窄不同,限位片102固定连接在所属伸缩套101的宽侧,伸缩套101窄侧开口的形状、大小与连接柱204的横截面相同;伸缩套101的窄侧的上壁有开口,开口到伸缩套101的窄侧的端部的距离与定位孔205到中间圆盘203的距离相等,定位销106与开口组成滑动副;
30.锁定架302与工具存放架301固定连接,解锁复位弹簧304一端连接工具存放架301,一端连接解锁架303,拨动柱305固定连接在锁定架302上,
31.伸缩套101的逆时针旋转致使拨动柱305与锁定拨杆103接触,锁定拨杆103在拨动柱305的作用力下带动锁定端头104转动,定位销在转动副和锁定弹簧105的作用下插入连接柱204的定位孔,使伸缩套101和末端执行器锁紧。
32.其中,定位销106的端部为斜面。
33.解锁架303上也固定连接有一个拨动柱306。
34.伸缩套101的窄侧内壁设有光滑斜面。
35.连接柱204的形状为长方体。
36.连接柱204的横截面是圆角矩形。
37.连接柱204采用空心结构。
38.定位孔205设在连接柱204的长边侧面上。
39.定位孔205有两个,且对称设置。
40.未进行解锁和锁紧操作时,锁定架302与解锁架303接触。
41.快速接口装置要实现机械臂与末端执行器的锁紧与松脱,需要连接在机械臂上的第一配合部、第二配合部和外部的第三配合部之间互相配合完成。
42.机械臂拾取末端执行器的过程分为如下几步:第一,机械臂对准第二配合部的连接柱204;第二,机械臂下降,连接柱204与第一配合部的伸缩套101接触并逐渐进入伸缩套101内部空腔,直至第二配合部的中间圆盘203被伸缩套101的窄侧所卡住,此时由于伸缩套101上的开口到窄侧口的距离与定位孔205到中间圆盘203的距离相等,伸缩套101上的开口与定位孔205正好对齐;第三,机械臂逆时针旋转,使拨动柱305与锁定拨杆103接触,锁定拨杆103受到拨动柱305的作用力带动锁定端头104转动,定位销106在转动副和锁定弹簧105的作用下插入连接柱204的定位孔205,使机械臂和末端执行器成功锁紧;第四,机械臂带动末端执行器向解锁架303方向移动,推动解锁架303和解锁复位弹簧304,使得锁定架302和解锁架303之间的空隙变大,并在沿着解锁架303的平面壁方向取出。
43.机械臂释放末端执行器的过程分为如下几步:第一,机械臂带动末端执行器使延长圆柱体202紧贴解锁架303平面壁,并向解锁架303方向移动,使锁定架302和解锁架303之间的空隙变大,到弧面壁停止运动,在解锁复位弹簧304的作用下重新卡在锁定架302和解锁架303之间;第二,机械臂顺时针旋转,使拨动柱305与锁定拨杆103接触,锁定拨杆103受到拨动柱305的作用力带动锁定端头104转动,定位销106在转动副和锁定弹簧105的作用下从连接柱204的定位孔205中脱出;第三,机械臂上升,连接柱204与第一配合部的伸缩套101逐渐分离,完成机械臂和末端执行器的松脱。
44.本发明说明书中未详细描述的内容为本领域技术人员公知技术。
45.应当理解,虽然本说明书是按照各个实施例描述的,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
46.以上所述仅为本技术示意性的具体实施方式,并非用以限定本技术的范围。任何本领域的技术人员,在不脱离本技术的构思和原则的前提下所作的等同变化、修改与结合,均应属于本技术保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。