1.本发明涉及晶圆检测装置的技术领域,并且特别涉及一种用于晶圆检测的补正装置。
背景技术:
2.晶圆检测内容包括检测异物、崩边、侵蚀等。为了达到检测效率、精度最大化,就需要确保晶圆上的芯片都能在显微镜的视野中心下取图,即晶粒方向需与显微镜检测方向一致。而晶圆传送到检测平台时的方向与显微镜的移动方向是无法一致的,为了保证检测的高效及精准性,就需要保证检测过程中,晶圆晶粒方向与显微镜移动方向一致。目前的解决方法主要有以下两个:
3.1、通过增加一对位相机,让对位相机在晶圆边上拍若干张图片,通过算法计算出晶圆与检测方向的角度误差,控制载台上的x轴、y轴的移动量,使晶圆上同一行的晶粒都能通过显微镜视野中心。
4.2、在上一种方案的基础上,在检测平台下增加直驱旋转伺服马达,在计算出晶圆与检测方向的角度误差后,驱动伺服马达转动对应角度,使晶粒方向与显微镜移动方向一致。
5.上述两点解决方案,虽然可以达到检测要求,但第一个方案由于是同时驱动两个轴运动,多轴组合运动的平顺性没有单轴运动的平顺性好,因此拍出来的图像品质不如单轴驱动拍出来的好。第二个方案使用了直驱伺服马达,根据伺服马达的特性,马达始终会微抖动,影响的取像品质。
技术实现要素:
6.为了解决现有技术中存在的多轴组合运动平顺性不好以及直驱伺服马达微抖动影响取像品质的技术问题,本发明提出了一种用于晶圆检测的补正装置,用以解决现有技术中的上述难题。
7.本发明提出了一种用于晶圆检测的补正装置,包括安装底板、多个xyθ轴导向模组、驱动装置和载台组件,载台组件可旋转地设置于安装底板上,多个xyθ轴导向模组设置于安装底板与载台组件之间并均布于载台组件的旋转轴所处的圆上,xyθ轴导向模组自下而上包括导向模组底板、x轴导向模块、y轴导向模块和旋转模块,导向模组底板与安装底板固定,旋转模块与载台组件固定连接,驱动装置与其中一个xyθ轴导向模组的x轴导向模块连接以推动载台组件旋转。该装置通过驱动装置推动一个xyθ轴导向模组的x轴导向模块运动,因xyθ轴导向模组存在x、y、θ三个方向的自由度,其余的xyθ轴导向模组收到上下固定的限制,在其自由度范围内带动载台组件以超高减速比平稳旋转一定角度。
8.优选的,载台组件通过旋转组件可旋转地设置于安装底板,旋转组件包括交叉滚柱轴承和转轴,交叉滚柱轴承的外圈与安装底板固定,转轴的两端分别与交叉滚柱轴承的内圈以及载台组件的下端面连接。凭借该设置能够将载台组件可旋转地设置在安装底板上
并且在二者之间形成可以放置xyθ轴导向模组的空间。
9.进一步优选的,包括3个xyθ轴导向模组,3个xyθ轴导向模组分布于安装底板上且位于载台组件的旋转轴所处的圆的三等分点处。凭借该设置能够更加稳定的实现载台组件的旋转。
10.优选的,x轴导向模块的相对移动量δx与载台组件的旋转角度δθ的关系为:δx=r cos(δθ θ)
‑
r cosθ,其中,r表示为xyθ轴导向模组于载台组件的旋转轴所处的圆的半径,θ表示当前位置的半径与x轴之间的夹角。利用该公式可以快速计算获得x轴导向模块的相对移动量进而便于控制驱动装置的进给实现精确的角度旋转。
11.进一步优选的,驱动装置包括电机与滚珠丝杆机构,电机驱动滚珠丝杆机构,滚珠丝杆机构的丝杆螺母设置于连接座上,连接座与x轴导向模块固定连接。利用电机与滚珠丝杆机构能够便于进行x轴导向模块的移动量的控制。
12.进一步优选的,载台组件包括旋转轴安装板、水平调整机构和真空吸附平台,旋转轴安装板通过旋转组件可旋转地设置于安装底板上,真空吸附平台通过多个水平调整机构设置于旋转轴安装板上。凭借该设置可以调整真空吸附平台的水平度。
13.进一步优选的,至少包括3个水平调整机构,且均布设置于转轴的轴线所处的圆上。3个点决定一个平面,因此,只要调整3个水平调整机构就可以调整真空吸附平台的水平度。
14.优选的,导向模组底板设置有x轴引导部,x轴导向模块内对应设置有x轴导向轨道,x轴导向模块上还设置有y轴引导部,y轴导向模块内对应设置有y轴导向轨道。凭借该设置能够实现导向模组的x、y方向的两个自由度。
15.进一步优选的,旋转模块为轴承,轴承的内圈与载台组件的下端面固定连接,外圈与y轴导向模块的上端面固定连接。该设置使得导向模组在x、y两个自由的的基础上还具有一个旋转的自由度。
16.进一步优选的,x轴导向模块的相对移动量δx=n
×
p,其中,n表示丝杆转动圈数,p表示丝杆的导程。利用该公式可以定义电机旋转的圈数进而控制x轴导向模块的相对移动量进而控制旋转角度。
17.本发明的一种用于晶圆检测的补正装置用步进马达驱动滚珠丝杠坐直线运动,通过x、y、θ组合导轨实现凸轮机构的复杂运动,推动平台做旋转运动。因步进马达可实现静止状态零抖动,完美的解决了直驱伺服马达的抖动问题。另外直线运动转旋转运动,可实现超高减速比,可将θ轴做的非常薄,加之采用x、y组合导轨做导向,赋予平台超高刚性。因此解决的角度补正问题以及抖动问题,可实现高品质显微检测。
附图说明
18.包括附图以提供对实施例的进一步理解并且附图被并入本说明书中并且构成本说明书的一部分。附图图示了实施例并且与描述一起用于解释本发明的原理。将容易认识到其它实施例和实施例的很多预期优点,因为通过引用以下详细描述,它们变得被更好地理解。附图的元件不一定是相互按照比例的。同样的附图标记指代对应的类似部件。
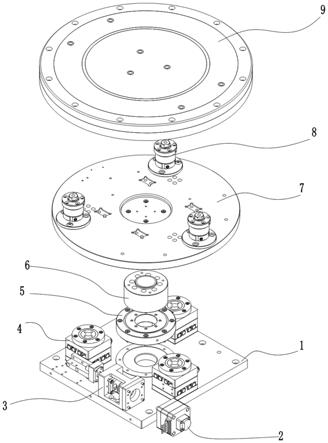
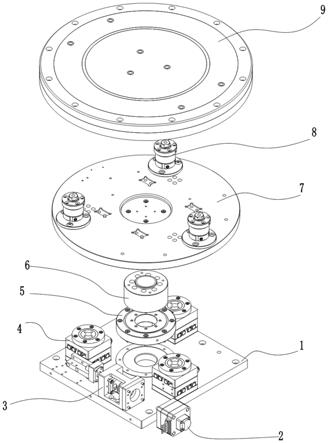
19.图1是根据本发明的一个实施例的一种用于晶圆检测的补正装置的爆炸图;
20.图2是根据本发明的一个具体的实施例的用于晶圆检测的补正装置的主视图;
21.图3是根据本发明的一个具体的实施例的用于晶圆检测的补正装置中xyθ轴导向模组的爆炸图;
22.图4是根据本发明的一个具体的实施例的用于晶圆检测的补正装置中的驱动装置的结构示意图。
23.图中各编号的含义:1
‑
模组安装底板、2
‑
步进电机、3
‑
滚珠丝杆机构、31
‑
步进电机安装座、32
‑
联轴器、33
‑
联轴器固定座、34
‑
丝杆、35
‑
丝杆螺母连接座、4
‑
xyθ轴导向模组、41
‑
导向模组底座、42
‑
x轴引导部、43、x轴导向模块、42
’‑
y轴引导部、44
‑
y轴导向模块、45
‑
旋转模块、5
‑
交叉滚柱轴承、6
‑
转轴、7
‑
旋转轴安装板、8
‑
载台水平调整机构、9
‑
真空吸附平台。
具体实施方式
24.在以下详细描述中,参考附图,该附图形成详细描述的一部分,并且通过其中可实践本发明的说明性具体实施例来示出。对此,参考描述的图的取向来使用方向术语,例如“顶”、“底”、“左”、“右”、“上”、“下”等。因为实施例的部件可被定位于若干不同取向中,为了图示的目的使用方向术语并且方向术语绝非限制。应当理解的是,可以利用其他实施例或可以做出逻辑改变,而不背离本发明的范围。因此以下详细描述不应当在限制的意义上被采用,并且本发明的范围由所附权利要求来限定。
25.图1示出了根据本发明的实施例的一种用于晶圆检测的补正装置的爆炸图。如图1所示,该用于晶圆检测的补正装置主要包括模组安装底板1、xyθ轴导向模组4、驱动装置和载台组件,其中驱动装置包括步进电机2和滚珠丝杆机构3,载台组件包括旋转轴安装板7、载台水平调整机构8和真空吸附平台9。载台组件的旋转轴安装板7通过交叉滚柱轴承5和转轴6可绕转轴6旋转地设置于模组安装底板1上,交叉滚珠柱轴承5的外圈锁在模组安装底板1的上表面,转轴6的下端面锁在交叉滚珠柱轴承5的内圈,由于交叉滚柱轴承5与转轴6具有一定高度,因此在旋转轴安装板7与模组安装底板1之间形成一空间,xyθ轴导向模组4安装于该空间中,其底部与模组安装底板1固定连接,顶部与旋转轴安装板7连接,驱动装置的滚珠丝杆机构3与xyθ轴导向模组4连接用以驱动xyθ轴导向模组4中的x轴模块移动,使得旋转轴安装板7在圆周方向受到一个x轴向的作用力,并且旋轴轴安装板7在转轴6的限制下做旋转运动,而xyθ轴导向模组4具有x轴、y轴和θ三个自由度,其顶部与旋转轴安装板7之间可相对旋转地连接,故x轴被驱动位移时,y轴和θ在xyθ轴导向模组4所处的旋转轴安装板7的旋转半径内会自动调节位移和旋转角度,使得旋转轴安装板7能够顺利完成旋转,并且因该过程具有很高的减速比,因此赋予了旋转轴安装板7(即载台组件)超高的刚性,能够有效地避免过程中的抖动,实现高品质的晶圆检测。
26.在一个具体的实施例中,xyθ轴导向模组4可设置多个,并且设置在旋转轴安装板7的旋转轴为圆心所处的圆上,该圆的半径小于旋转轴安装板7的半径以使得xyθ轴导向模组4能够固定于旋转轴安装板7内,优选的,以多个xyθ轴导向模组4以等分的方式均布于该圆上,在本实施例中,设置3个xyθ轴导向模组4,以3等分的方式均布于该圆上。以其中一个xyθ轴导向模组4作为主动端,其余xyθ轴导向模组4为从动端,在旋转轴安装板7旋转时根据自由度自动调节x、y和θ的位移量或旋转角度。
27.结合图2,图2示出了根据本发明的一个具体的实施例的用于晶圆检测的补正装置
的主视图,如图2所示,驱动装置的滚珠丝杆机构3与其中一个xyθ轴导向模组4连接用以控制其x轴方向的位移量,其推动该主动端的xyθ轴导向模组4的x轴向位移,藉此给予旋转轴安装板7在xyθ轴导向模组4与其固定部处的一个x轴向的推力,令旋转安装板7旋转,由于xyθ轴导向模组4具有x轴、y轴和θ三个自由度,在x、y两个方向上的自由度限制下,可形成固定部所在半径上的旋转轨迹,再通过θ方向的可旋转特性,使其可以在与旋转轴安装板7固定的同时旋转,避免刚性连接造成的无法旋转的问题。
28.在一个具体的实施例中,图3示出了根据本发明的一个具体的实施例的用于晶圆检测的补正装置中xyθ轴导向模组的爆炸图,如图3所示,xyθ轴导向模组4自下而上包括导向模组底座41、x轴导向模块43、y轴导向模块44和旋转模块45,导向模组底座41底部固定于旋转轴安装板7上,导向模组底座41的上部设置有x轴引导部42,x轴导向模块43的底部设置有与x轴引导部42对应的导向轨道,上部设置有y轴引导部42’,y轴导向模块44底部设置有与y轴引导部42’对用的导向轨道,旋转模块45为一轴承,该轴承的外圈与y轴导向模块44的顶部固定,内圈可相对于外圈旋转,并且内圈和旋转轴安装板7连接。该xyθ轴导向模组的x轴导向模块43、y轴导向模块44和旋转模块45之间相互存在自由度关系,可实现自由度的调整。
29.图4是示出了根据本发明的一个具体的实施例的用于晶圆检测的补正装置中的驱动装置的结构示意图,如图4所示,步进电机安装座31设置于滚珠丝杆机构的联轴器固定座33的一侧,并且随联轴器固定座33固定于模组安装底座1上,步进电机2固定于步进电机安装座31上,并与设置于联轴器固定座33内的联轴器32连接,进而带动与联轴器32连接的丝杆34旋转,丝杆34上设置有丝杆螺母,丝杆螺母与丝杆螺母连接座35固定,通过丝杆34的旋转进而可以驱使丝杆螺母连接座35的整体位移。
30.在具体的实施例中,丝杆螺母连接座35与xyθ轴导向模组4的x轴导向模块43固定连接,以驱使x轴导向模块43位移,应当认识到,还可以将丝杆螺母连接座35与y轴导向模块44固定连接,依靠另外两个自由度同样可以实现旋转轴安装板7的旋转。
31.在具体的实施例中,把真空吸附平台9和载台水平调整机构8安装在转轴安装板7上,将真空吸附平台9锁付在三个载台水平调整机构8的支撑杆上;转动载台水平调整机构8上的细牙螺母时,细牙螺母将带动支撑杆伸缩,由于三点决定一个平面,以此只要转动三个载台水平调整机构8的细牙螺母就可以调整真空吸附平台9的水平度。应当认识到载台水平调整机构8还可以根据真空吸附平台9的大小设置为大于3个,同样能够实现本技术的技术效果。
32.在具体的实施例中,晶圆传送到检测平台,对位相机在晶圆边上拍若干张图片后,通过特定算法计算出晶圆与检测方向间的角度δθ,而丝杠螺母的移动量(即与xyθ轴导向模组4的x轴导向模块的位移量)δx与旋转平台的旋转角度符合以下数学关系:δx=r cos(δθ θ)
‑
r cosθ,其中,r表示为xyθ轴导向模组于载台组件的旋转轴所处的圆的半径,θ表示当前位置的半径与x轴之间的夹角,该θ可以理解为连接在x轴上的交叉滚柱轴承中心的角度位置θx与动作前的工作台角度θ0之和。只要把算出来的角度δθ带入上式,便可求出x轴的相对移动量,即丝杠螺母的移动量。而丝杠螺母的移动量(即x轴的相对移动量)δx与丝杠转动圈数n的关系为δx=n
×
p,其中,n表示丝杆转动圈数,p表示丝杆的导程。以此可通过控制步进马达的转动圈速来控制检测平台转动特定角度。
33.本技术针对现有技术中同时驱动两个轴运动,多轴组合运动的平顺性没有单轴运动的平顺性好,因此拍出来的图像品质不如单轴驱动拍出来的好;使用了dd伺服马达,伺服马达的特性会导致马达始终会微抖动,影响的取像品质的问题,采用步进马达驱动滚珠丝杠坐直线运动,通过x、y组合导轨和θ旋转实现类似凸轮机构的复杂运动,推动平台做旋转运动。因步进马达可实现静止状态零抖动,完美的解决了dd伺服马达的抖动问题。另外直线运动转旋转运动,可实现超高减速比,可将θ轴做的非常薄,加之采用x、y组合导轨做导向,赋予平台超高刚性。因此解决的角度补正问题以及抖动问题,可实现高品质显微检测。
34.显然,本领域技术人员在不偏离本发明的精神和范围的情况下可以作出对本发明的实施例的各种修改和改变。以该方式,如果这些修改和改变处于本发明的权利要求及其等同形式的范围内,则本发明还旨在涵盖这些修改和改变。词语“包括”不排除未在权利要求中列出的其它元件或步骤的存在。某些措施记载在相互不同的从属权利要求中的简单事实不表明这些措施的组合不能被用于获利。权利要求中的任何附图标记不应当被认为限制范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。