多视图显示器对准方法和系统
1.相关申请的交叉引用
2.本技术要求于2019年4月2日提交的美国临时专利申请序列号62/828,398的优先权,其通过引用整体合并于此。
3.关于联邦资助的研究或开发的声明
4.n/a
背景技术:
5.电子显示器是用于向各种设备和产品的用户传递信息的几乎无处不在的介质。最常采用的电子显示器包含阴极射线管(crt)、等离子体显示板(pdp)、液晶显示器(lcd)、电致发光显示器(el)、有机发光二极管(oled)和有源矩阵oled(amoled)显示器、电泳显示器(ep)以及采用机电或电流体光调制的各种显示器(例如,数字微镜设备、电润湿显示器等)。通常来说,电子显示器可以被分类为有源显示器(即发光的显示器)或无源显示器(即,调制由另一个源所提供的光的显示器)。有源显示器的最明显的示例是crt、pdp和oled/amoled。当考虑发射的光时,典型地被分类为无源的显示器的是lcd和ep显示器。无源显示器虽然常常展现出包含但不限于固有的低能耗的有吸引力的性能特性,但由于缺乏发光能力而在许多实际应用中使用可能受到某些限制。
6.目前用于在制造期间对准这种显示器的部件的技术通常涉及利用显微镜将发光部分(例如,背光、膜等)上的标记与显示器面板上的标记对准以在组装期间正确对准部件。然而,这种技术的缺点包括对工具要求非常高的精度(例如,给定显微镜载物台的尺寸、远心(telecentric)透镜上的机械公差的紧密性等)、对显微镜视野的对准操作的限制以及不能检测某些为对准,诸如标记间局部失真。
附图说明
7.参照结合附图的以下详细描述,可以更容易理解根据在此描述的原理的示例和实施例的各种特征,其中相同的参考数字表示相同的结构元件,并且其中:
8.图1a示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器的透视图。
9.图1b示出了根据与在此描述的原理一致的实施例的示例中具有特定主角方向的光束的角分量的图形表示。
10.图1c示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器的透视图。
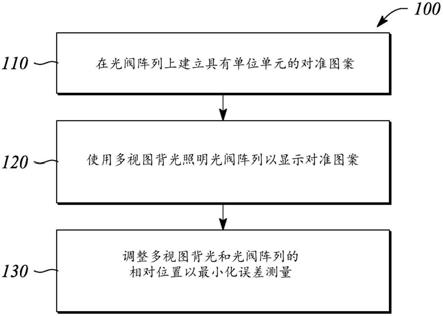
11.图2示出了根据与在此描述的原理一致的实施例的示例中将多视图背光与多视图显示器的光阀阵列对准的方法的流程图。
12.图3a示出了根据与在此描述的原理一致的实施例的示例中的对准图案的平面图。
13.图3b示出了根据与在此描述的原理一致的另一实施例的示例中的对准图案的平面图。
14.图3c是根据与在此描述的原理一致的另一个实施例的示例中的对准图案的平面图。
15.图4a示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器的一部分的透视图。
16.图4b示出了根据与在此描述的原理一致的实施例的示例中的图4a的多视图显示器部分的横截面图。
17.图5a示出了根据与在此描述的原理一致的实施例的实例中在调整多视图背光和光阀阵列的相对位置以最小化误差测量之前的照明光阀阵列的对准图案的平面图。
18.图5b示出了根据与在此描述的原理一致的实施例的实例中在调整多视图背光和光阀阵列的相对位置以最小化示例中的误差测量之后的图5a的对准图案的平面图。
19.图6示出了根据与在此描述的原理一致的实施例的示例中的单位单元亮度质心的图形表示。
20.图7示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器背光对准系统的框图。
21.图8示出了根据与在此描述的原理一致的实施例的示例中的自动多视图显示器背光对准系统的框图。
22.某些实例和实施例具有作为在上述参考附图中所示特征的补充和替代之一的其他特征。下面参照上述附图详细说明这些特征和其他特征。
具体实施方式
23.根据在此描述的原理的示例和实施例提供了一种将多视图背光与多视图显示器的光阀阵列对准的方法以及多视图显示器背光对准系统。具体地,根据在此描述的原理,将多视图背光与光阀阵列对准的方法可以使用由多视图背光照明时显示在光阀阵列上或由光阀阵列显示的对准图案来提供对准。根据各种实施例,对准图案包括彼此间隔开的多个单位单元,每个单位单元包括具有对应于多视图显示器的不同视图的不同视图方向的多个视图块。此外,在一些实施例中,在单位单元内的视图块的排列对应于多视图显示器的不同视图的排列。通过使用显示的对准图案,可以调整多视图背光和光阀阵列的相对位置以最小化从所显示的对准图案确定的误差测量,从而提供精确对准。由于在此描述的对准方法采用显示的对准图案,因此不需要其他光学对准标记。此外,根据一些实施例,多视图背光和光阀阵列的对准可以在多视图显示器背光对准系统中自动进行。
24.在此,“二维显示器”或“2d显示器”被定义为被配置为无论从哪个方向观看图像(即,在2d显示器的预定义的观察角度或范围内)都提供基本相同的图像的视图的显示器。在许多智能电话和计算机监视器中发现的常规液晶显示器(lcd)是2d显示器的示例。与此相反并且在本文中,“多视图显示器”被定义为被配置为在不同视图方向上或从不同视图方向提供多视图图像的不同视图的电子显示器或显示系统。具体地,不同视图可以表示多视图图像的场景或对象的不同透视图。例如,根据各种实施例,在此描述的多视图显示器可以用于结合所谓的“无眼镜”的或自动立体显示系统来呈现图像和类似信息。在此描述的多视图显示器的使用包括但不限于移动电话(例如,智能电话)、手表、平板计算机、移动计算机(例如,膝上型计算机)、个人计算机和计算机监视器、汽车显示控制台、相机显示器以及各
种其他移动和基本上非移动的显示应用程序和设备。
25.图1a示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器10的透视图。如图1a所示,多视图显示器10包括用于显示要观看的多视图图像的屏幕12。例如,屏幕12可以是电话(例如,移动电话、智能电话等)、平板计算机、膝上型计算机、台式计算机的计算机监视器、相机显示器或基本上任何其他设备的电子显示器的显示器。
26.多视图显示器10在相对于屏幕12的不同视图方向16上提供多视图图像的不同视图14。视图方向16被图示为从屏幕12以各种不同的主角方向延伸的箭头;不同的视图14被图示为在箭头(即,描绘视图方向16的箭头)的末端处的阴影多边形框。在图1a中仅图示了四个视图14和四个视图方向16,均作为示例而非限制。而且,虽然在图1a中将不同视图14图示为在屏幕上方,但是当在多视图显示器10上显示多视图图像时,视图14实际上出现在屏幕12上或其附近。将不同视图14描绘在屏幕12上方仅为了简化说明,并且旨在表示从与特定视图14对应的视图方向16中的对应一个来观察多视图显示器10。2d显示器可以基本上类似于多视图显示器10,除了2d显示器通常被配置为提供所显示图像的单个视图(例如,类似于视图14的一个视图),而不是由多视图显示器10提供的多视图图像的不同视图14。
27.根据在此的定义,视图方向或等效地具有与多视图显示器的视图方向对应的方向的光束通常具有由角分量{θ,φ}给出的主角方向。角分量θ在此被称为光束的“仰角分量”或“仰角”。角分量φ被称为光束的“方位分量”或“方位角”。根据定义,仰角θ是垂直平面(例如,垂直于多视图显示器屏幕的平面)中的角度,而方位角φ是水平平面(例如,平行于多视图显示器屏幕的平面)中的角度。
28.图1b示出了根据与在此描述的原理一致的实施例的示例中的具有与多视图显示器的视图方向(例如,图1a中的视图方向16)相对应的特定主角方向的光束20的角分量{θ,φ}的图形表示。此外,根据在此的定义,从特定点发射或发出光束20。也就是说,根据定义,光束20具有与多视图显示器内的特定原点相关联的中心光线。图1b还示出了光束(或视图方向)原点o。
29.图1c示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器10的透视图。根据各种实施例,多视图显示器10被配置为提供或发射光(例如,定向光束)作为发射光18,其在被调制时可以表示在不同视图方向16上具有不同视图14的多视图图像,如图所示。
30.如图所示,多视图显示器10包括光阀阵列30和多视图背光40。多视图背光40被配置为发射光作为定向光束,以照明光阀阵列的光阀30。进而,光阀阵列的光阀30被配置为调制发射的光以提供多视图图像。在各种实施例中,可以采用不同类型的光阀作为光阀阵列的光阀30,包括但不限于液晶光阀、电泳光阀和基于电润湿的光阀中的一个或多个。例如,光阀阵列可以包括多个液晶光阀,并且光阀阵列可以是液晶显示器(lcd)面板。注意,光阀有时被称为多视图显示器10的“单元”或“像素”。因此,根据在此的定义,术语“光阀”、“像素”和“单元”可以互换地表示相同的事物。
31.根据一些实施例(例如,如图所示),多视图背光40可以包括光导42和多束元件阵列44,光导被配置为从光源引导光,多束元件阵列44被配置为将部分被引导光散射出作为表示发射光18并且具有对应于多视图显示器10的不同视图的视图方向16的方向的定向光束。具体地,根据各种实施例,多束元件阵列的每个多束元件44被配置为从光导42散射出被
引导光的一部分作为具有对应于不同视图方向14的方向的多个定向光束。作为示例而非限制,图1c中的箭头示出了由多束元件44从光导42散射出来的发射光18的定向光束。图1c还示出了与使用虚线包围光阀阵列的光阀30的子集的多束元件44相关联的多视图像素32。在其他实施例(未示出)中,多视图背光40可以包括视差屏障或被配置为提供定向光束的另一结构。
32.在一些实施例中,多视图背光40的多束元件44的尺寸可以在光阀阵列30的光阀的尺寸的百分之二十五(25%)到百分之二百(200%)之间。此外,多波束元件阵列的相邻多波束元件之间的间距可以与多视图显示器10的相邻多视图像素32之间的间距相称(commensurate)。例如,一对相邻多束元件之间的发射器间距离(例如,中心到中心距离)可以等于对应的相邻对多视图像素32之间的像素间距离(例如,中心到中心距离),例如,由光阀阵列的多组光阀30表示。
33.根据各种实施例,多视图背光40的多束元件44可以包括被配置为从光导42散射出被引导光的一部分的多个不同结构中的任何一个。例如,不同的结构可以包括但不限于衍射光栅、微反射元件、微折射元件或其各种组合。具体地,多束元件阵列包括被配置为衍射地散射出被引导光的衍射光栅、被配置为反射地散射出被引导光的微反射元件、以及被配置为折射地散射出被引导光的微折射元件的一个或多个。
34.在一些实施例中(例如,如图所示),多视图背光40还包括光源46。如图所示,光源46可以耦合到光导42的边缘,并且被配置为提供要由光导42引导的光作为被引导光。在一些实施例中,光源46被配置为提供要以非零传播角度引导的光并且提供要根据预定准直因子引导的光作为准直引导光的一个或两个。例如,在一些实施例中,光源46可以包括准直器。在一些实施例中,准直的被引导光的准直因子可以确定由多视图背光40的多束元件44散射出的多个定向光束的散射角,即,多束元件44可以包括保角散射元件。
35.在此,“光导”被定义为使用全内反射在结构内引导光的结构。具体地,光导可以包括在光导的工作波长处基本上透明的芯。术语“光导”通常指的是采用全内反射在光导的介电材料和围绕该光导的材料或介质之间的界面处引导光的介质光波导。根据定义,全内反射的条件是光导的折射率大于邻近光导材料表面的周围介质的折射率。可以在光导中采用多种光学透明材料中的任何,包括但不限于各种类型的玻璃(例如,石英玻璃、碱铝硅酸盐玻璃、硼硅酸盐玻璃等)、以及基本光学透明的塑料或聚合物(例如,聚(甲基丙烯酸甲酯)或“丙烯酸玻璃”、聚碳酸酯等)中的一个或多个。在一些实施例中,除了上述折射率差之外或代替上述折射率差,光导可以包括涂层以进一步促进全内反射。例如,该涂层可以是反射涂层。光导可以是几种光导中的任何一种,包括但不限于板或平板光导和条形光导中的一个或两个。
36.在此,“衍射光栅”通常被定义为多个特征(即,衍射特征),其排列为提供入射到衍射光栅上的光的衍射。在一些示例中,多个特征可以以周期性或准周期性的方式排列。例如,衍射光栅可以包括以一维(1d)阵列排列的多个特征(例如,在材料表面中的多个凹槽或脊)。在其他示例中,衍射光栅可以是二维(2d)特征阵列。例如,衍射光栅可以是材料表面上的凸起或孔的2d阵列。
37.此外,根据在此的定义,衍射光栅的特征被称为“衍射特征”,并且可以是材料表面(即,两种材料之间的边界)处、材料表面内和材料表面上的一个或多个。例如,该表面可以
是光导的表面。衍射特征可以包括衍射光的各种结构中的任何一种,包括但不限于在表面处、在表面内或在表面上的凹槽、脊、孔和凸起中的一个或多个。例如,衍射光栅可以在材料表面上包括多个基本平行的凹槽。在另一示例中,衍射光栅可以包括从材料表面升起的多个平行脊。衍射特征(例如,凹槽、脊、孔、凸起等)可以具有提供衍射的多种截面形状或轮廓中的任何一种,包括但不限于正弦轮廓、矩形轮廓(例如二元衍射光栅)、三角形轮廓和锯齿轮廓(例如闪耀光栅)中的一个或多个。
38.根据在本文中描述的各种示例,衍射光栅(例如,如下所述的衍射多束元件的衍射光栅)可被用于将光衍射地散射或耦合出光导(例如,板光导)作为光束。具体地,局部周期性衍射光栅的衍射角θ
m
或由其提供的衍射角θ
m
可以由等式(1)给出:
[0039][0040]
其中,λ是光的波长,m是衍射级,n是光导的折射率,d是衍射光栅的特征之间的距离或间隔,θ
i
是光在衍射光栅上的入射角。简单起见,等式(1)假定衍射光栅与光导的表面相邻,并且光导外的材料的折射率等于1(即,n
out
=1)。通常,衍射级m被给出为整数。由衍射光栅产生的光束的衍射角θ
m
可以由等式(1)给出,其中衍射级为正(例如,m>0)。例如,当衍射级m等于1时(即,m=1)时,提供一级衍射。
[0041]
根据在此的定义,“多束元件”是产生包括多个光束的光的背光或显示器的结构或元件。在一些实施例中,多束元件可以光学耦合到背光的光导,以通过耦合或散射出在光导中引导的光的一部分来提供多个光束。此外,根据在此的定义,由多束元件产生的多个光束的光束具有彼此不同的主角方向。具体地,根据定义,多个光束的一个光束具有与多个光束的另一光束不同的预定主角方向。因此,根据在此的定义,光束被称为“定向光束”,并且多个光束可以被称为“多个定向光束”。
[0042]
此外,多个定向光束可以表示光场。例如,多个定向光束可以被限制在基本圆锥形的空间区域,或者具有包括在多个光束中的光束的不同主角方向的预定角展度(angular spread)。像这样,组合的定向光束(即,多个光束)的预定角展度可以表示光场。
[0043]
在此,“多视图像素”被定义为表示多视图显示器的相似多个不同视图中的每一个中的“视图”像素的一组像素。具体地,多视图像素可以具有对应于或表示多视图图像的每个不同视图中的视图像素的各个像素。此外,根据在此的定义,多视图像素的像素是所谓的“定向像素”,因为每个像素与不同视图中对应的一个的预定视图方向相关联。此外,根据各种示例和实施例,由多视图像素的像素表示的不同视图像素在每个不同视图中可以具有等效或至少基本上相似的位置或坐标。例如,第一多视图像素可以具有对应于位于多视图图像的每个不同视图中的{x1,y1}处的视图像素的各个像素,而第二多视图像素可以具有对应于位于每个不同视图中的{x2,y2}处的视图像素的各个像素,以此类推。
[0044]
在此,“准直器”被定义为被配置为准直光的基本上任何光学设备或装置。根据各种实施例,准直器提供的准直量可以按预定程度或量从一个实施例到另一个实施例变化。此外,准直器可以被配置为在两个正交方向(例如,垂直方向和水平方向)中的一个或两个方向上提供准直。也就是说,根据一些实施例,准直器可以包括在提供光准直的两个正交方向中的一个或两个方向上的形状。
[0045]
在本文中,“准直因子”被定义为光被准直的程度。具体地,根据本文中的定义,准
直因子定义了光线在准直的光束内的角展度。例如,准直因子σ可以指定准直光的光束中的大部分光线在特定的角展度内(例如,关于准直的光束的中心或主角方向的 /
‑
σ度)。根据一些示例,准直的光束的光线在角度方面可以具有高斯分布,并且角展度可以是由在准直的光束的峰值强度的二分之一处确定的角度。
[0046]
在本文中,“光源”被定义为光的来源(例如,被配置为产生和发射光的光发射器)。例如,光源可以包括诸如当激活或打开时发射光的发光二极管(led)的光发射器。具体地,在本文中,光源可以基本上是光的任何来源或基本上包括任何光发射器,光发射器包括但不限于发光二极管(led)、激光器、有机发光二极管(oled)、聚合物发光二极管、基于等离子体的光发射器、荧光灯、白炽灯以及几乎任何其他光源中的一个或多个。由光源产生的光可以具有颜色(即,可以包括特定波长的光),或者可以是一定波长范围(例如,白光)。在一些实施例中,光源可以包括多个光发射器。例如,光源可以包括一套或一组光学发射器,其中至少一个光发射器产生具有与由该套或该组中的至少一个其他光发射器产生的光的颜色或波长不同的颜色或等效波长的光。例如,不同的颜色可以包括原色(例如,红、绿、蓝)。
[0047]
在此,“多视图图像”被定义为多个图像(即,大于三个图像),其中多个图像中的每个图像表示对应于多视图图像的不同视图方向的不同视图。因此,多视图图像是图像(例如,二维图像)的集合,其在显示在多视图显示器上时可以促进对深度的感知,因此对于观看者例如看起来是3d场景的图像。
[0048]
与在此描述的原理一致的实施例可以使用各种设备和电路来实现,包括但不限于集成电路(ic)、超大规模集成电路(vlsi)、专用集成电路(asic)、现场可编程门阵列(fpga)、数字信号处理器(dsp)、图形处理器单元(gpu)等中的一个或多个、固件、软件(诸如程序模块或指令集)、以及上述两个或更多个的组合。例如,实施例或其元件可以实现为asic或vlsi电路内的电路元件。采用asic或vlsi电路的实现是基于硬件的电路实现的示例。
[0049]
在另一示例中,实施例可以被实现为使用计算机编程语言(例如,c/c )的软件,该计算机编程语言在操作环境或进一步由计算机(例如,存储在存储器中并由通用计算机的处理器或图形处理器执行)的基于软件的建模环境(例如,mathworks、inc.、natick、ma)中执行。注意,一个或多个计算机程序或软件可以构成计算机程序机制,并且编程语言可以被编译或解释,例如可配置或配置(在本讨论中可以互换使用),以由计算机的处理器或图形处理器执行。
[0050]
在又一示例中,本文描述的装置、设备或系统(例如,图像处理器、相机等)的块、模块或元件可以使用实际或物理电路(例如,作为ic或asic)来实现,而另一块、模块或元件可以以软件或固件来实现。具体地,根据在此的定义,可以使用基本上基于硬件的电路方法或设备(例如,ic、vlsi、asic、fpga、dsp、固件等)来实现一些实施例,而其他实施例例如也可以实现为使用计算机处理器或图形处理器来执行软件的软件或固件,或者实现为软件或固件和基于硬件的电路的组合。
[0051]
此外,如在此所使用的,冠词
““
一”意欲具有其在专利文献中的普通的含义,即“一个或多个”。例如,“多波束元件”是指一个或多个多波束元件,因此,在此的“多波束元件”是指“(一个或多个)多波束元件”。此外,本文中对“顶”、“底”、“上面”、“下面”、“上”、“下”、“前”、“后”、“第一”、“第二”、“左”或“右”的任何提及在本文中无意成为限制。在此,除非另
有明确说明,否则术语“大约”在应用于值时通常指的是用于产生该值的装备的容差范围内,或者可以表示正负10%,或者正负5%,或者正负1%。此外,在此使用的术语“基本上”意味着是大部分、或几乎全部、或全部、或在约51%至约100%的范围内的量。此外,在本文中的示例意图仅是说明性的,并且是为了讨论的目的而呈现的,而不是当作限制。
[0052]
根据在此描述的原理的一些实施例,提供了一种将多视图背光与多视图显示器的光阀阵列对准的方法。这种方法可以例如在组装多视图显示器和组装的多视图显示器的质量控制中的一个或两个期间执行。例如,对准方法可以促进对准光阀阵列30和多视图显示器10的多视图背光40,如以上在图1c中通过示例的方式所示的。
[0053]
图2示出了根据与在此描述的原理一致的实施例的示例中将多视图背光与多视图显示器的光阀阵列对准的方法100的流程图。如图所示,将多视图背光与多视图显示器的光阀阵列对准的方法100包括在光阀阵列上建立110具有彼此间隔开的单位单元的对准图案。对准图案的每个单位单元包括具有对应于多视图显示器的不同视图的不同视图方向的多个视图块。根据各种实施例,每个单位单元内的视图块的排列对应于多视图显示的视图的排列。此外,对准图案可以包括分布在多视图显示器的光阀阵列上的多个单位单元,例如,作为间隔开的单位单元的阵列。例如,单位单元可以分布成基本上覆盖多视图显示器或其光阀阵列的范围或整个区域。
[0054]
根据在此的定义,“视图块”的光阀阵列的光阀或像素的子集。例如,表示视图块的像素子集可以包括多个连续的光阀。此外,根据定义,视图块具有对应于多视图显示器的视图方向的视图方向或等效于多视图显示器的多视图图像的视图方向。也就是说,构成视图块的像素或光阀被配置为选择性地通过具有对应于视图块的视图方向的方向的定向光束。例如,为了提供视图块,可以打开(turn on)或开启(open)表示视图块的光阀子集的某些光阀,以允许具有对应于视图块的视线方向的方向的定向光束通过光阀。同时,关闭或关掉表示视图块的光阀子集的其他光阀,以阻挡具有其他方向的定向光束。结果,视图块仅在对应于视图块的视图方向的方向上发光,例如,不在对应于多视图显示器的其他视图方向的方向上。
[0055]
此外,对准图案的“单位单元”被定义为集合、组或多个视图块,其中多视图显示器的每个视图由该单位单元的视图块中的不同一个来表示。也就是说,根据在此的定义,单位单元包括对应于多视图显示器的每个视图的视图块。此外,在单位单元内的视图块的排列对应于多视图显示器的视图的排列。例如,如果多视图显示器具有不同视图的四乘四(4
×
4)排列,则单位单元将具有类似的4
×
4视图块排列,每个视图块表示4
×
4视图排列的不同视图,即,单位单元将具有表示16个不同视图并且以4
×
4阵列排列的十六(16)个不同视图块。在另一示例中,多视图显示器可以提供以八乘一(8
×
1)阵列或图案排列的八(8)个不同视图。然后,单位单元将具有8个不同视图块的8
×
1排列,8个不同视图块中的每一个表示或提供对应于8个不同视图的方向上的发射光。在一些实施例中,单位单元的视图块或单位单元内的视图块彼此相邻。
[0056]
因此,在光阀阵列上建立110对准图案可以包括选择性地打开或关闭光阀阵列的光阀,以提供对准图案的各个单位单元的不同视图块。在一些实施例中,多视图显示器的视图排列可以包括顺序排列的视图的一维(1d)阵列。因此,对准图案的每个单位单元具有对应的顺序排列的视图块的1d阵列。例如,视图的1d阵列可以是以四乘一(4
×
1)阵列顺序排
列的四(4)个视图,并且单位单元可以具有表示4个视图并且以4
×
1顺序排列的4个视图块。在另一示例中,可以存在以八乘一(8
×
1)阵列排列的八(8)个视图(例如,视图1、视图2、
……
、视图8),并且在单位单元中的视图块的1d阵列可以是8
×
1顺序阵列。
[0057]
在其他实施例中,多视图显示器的视图排列可以包括视图的二维(2d)阵列。在这些实施例中,对准图案的每个单位单元具有表示多视图显示器的不同视图或视图方向中的每一个的对应的2d视图块阵列。例如,视图的2d阵列可以是以两行两列排列的四个视图的二乘二(2
×
2)阵列。然后,该单位单元将具有对应的2
×
2视图块阵列。在另一示例中,2d阵列可以是16个视图的四乘四(4
×
4)阵列,并且单位单元将包括16个对应视图块的类似的4
×
4阵列。
[0058]
图3a示出了根据与在此描述的原理一致的实施例的示例中的对准图案200的平面图。图3b示出了根据与在此描述的原理一致的另一实施例的示例中的对准图案200的平面图。图3c是根据与在此描述的原理一致的另一个实施例的示例中的对准图案200的平面图。如图所示,每个对准图案200包括单位单元210,并且每个单位单元210包括多个视图块212。此外,如上所述,视图块212中的每一个都包括光阀或光阀阵列的像素的子集,其被选择性地激活或去激活以在对应于视图块212的视图方向的方向上提供发射光。光阀阵列由在图3a
‑
图3c中的对准图案200周围的边界示出。然而,在图3a
‑
图3c中未示出光阀阵列的各个光阀,为了便于说明,各个光阀通常比视图块212小得多。
[0059]
图3a示出了具有四乘四(4
×
4)排列的视图块212的2d阵列的单位单元210。作为示例,在放大的示例性单位单元210的视图块212中标识视图号,以示出与由在图3a中的视图块212表示的多视图显示器的不同视图的对应关系。此外,如图3a所示,对准图案200的单位单元210彼此隔开,并且分布在在其上建立对准图案200的光阀阵列的主要部分或范围上。
[0060]
图3b和图3c示出了视图块212的1d阵列。具体地,在图3b中示出了在对准图案200的每个所示单位单元210中包括视图块212的四乘一(4
×
1)排列的1d阵列。图3c描绘了在所示对准图案200的每个单位单元210中的视图块212的八乘一(8
×
1)排列。作为示例而非限制,图3b和图3c中的每一个中的单位单元210中的视图块212被编号以示出视图块212与多视图显示器的视图的对应关系。
[0061]
在其他实施例(未示出)中,视图块212可以不以对应于多视图显示器的视图的方式排列在单位单元210内。然而,根据各种实施例,每个单位单元210仍然具有对应于每个视图的不同视图块212。注意,例如,视图的1d排列可以在所谓的仅水平视差多视图显示器中使用,而视图的2d排列可以对应于所谓的全视差多视图显示器。还要注意的是,视图的2d排列和视图块212的对应2d排列在两个正交方向上不需要具有相同数目的视图,例如,2d排列可以是4
×
2或5
×
3、2
×
4,或者仅仅是任何其他排列。
[0062]
图4a示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器230的一部分的透视图。图4b示出了根据与在此描述的原理一致的实施例的示例中的图4a的多视图显示器部分的截面图。如图所示,多视图显示器230包括光阀阵列232和多视图背光234。在一些实施例中,多视图显示器230、光阀阵列和多视图背光234可以分别基本类似于上述多视图显示器10、光阀阵列30和多视图背光40。
[0063]
作为示例而非限制,图4a和图4b还示出了被配置为显示具有单位单元210对准图案200的光阀阵列,该单位单元210具有2
×
2排列的视图块212。如所示,在图4a
‑
图4b中的单
位单元210的每个视图块212包括光阀阵列的多个光阀232,该光阀阵列被配置为传递对应于多视图显示器230的四(4)个不同视图中的不同视图的光。具体地,图4a使用交叉影线(cross hatching)示出了每个单位单元210内的激活或打开的光阀232,而没有用交叉影线描绘并示出了阻挡每个单位单元210中的光的未激活或关闭的光阀。图4b示出了使用“x”的未激活或关闭的光阀232和没有使用“x”的打开或激活的光阀232。
[0064]
如图所示,每个视图块212包括一组不同的激活和未激活的光阀,不同的组对应于多视图显示器230的不同视图。例如,单位单元210的第一视图块212a可以被配置为通过对应于多视图显示器230的第一视图v1的光或在其方向上的光,并且第二视图块212b可以被配置为通过对应于多视图显示器230的第二视图v2的光或在其方向上的光,例如,如图所示。类似地,其他视图块212可以被配置为通过对应于其他视图(例如,第三视图v3和第四视图v4)的光或在其他视图的方向上的光。
[0065]
图4b还示出了由多视图背光234发射的光作为表示定向光束的箭头。例如,如上所述,定向光束可以由多束元件发射。如图4b所示,具有对应于第一视图v1的方向的定向光束通过第一视图块212a内激活或打开的光阀232。具有对应于第二视图v2的方向的其他定向光束被第一视图块212a内的未激活或关闭的光阀232阻挡,也如图所示。此外,如图4b所示,具有对应于第二视图v2的方向的定向光束通过第二视图块212b内激活或打开的光阀232,而具有对应于第一视图v1的方向的其他定向光束被光阀阵列的未激活或关闭的光阀232阻挡。
[0066]
再次参考图2,将多视图背光与多视图显示器的光阀阵列对准的方法100还包括使用多视图背光照明120光阀阵列以显示对准图案。例如,多视图背光可以将光作为定向光束发射以照明120光阀阵列,例如,如以上参考图1c和图4b所描述的。
[0067]
在一些实施例中,用于照明光阀阵列的多视图背光可以基本上类似于图1c中所示的上述多视图显示器10的多视图背光40。例如,多视图背光可以包括被配置引导光作为被引导光的光导和通过光导彼此间隔开的多束元件阵列。根据这些实施例,多束元件阵列的每个多束元件可以被配置为从光导散射出被引导光的一部分作为具有对应于不同视图方向(例如,多视图显示器的视图方向或由多视图显示器显示的多视图图像的方向)的方向的多个定向光束。在各种实施例中,每个多束元件的尺寸在光阀阵列的光阀尺寸的四分之一到两倍之间。此外,在一些实施例中,多束元件阵列的多束元件可以包括被配置为衍射地散射出被引导光的衍射光栅、被配置为反射地散射出被引导光的微反射元件、以及被配置为折射地散射出被引导光的微折射元件中的一个或多个。
[0068]
如图2所示,将多视图背光与多视图显示器的光阀阵列对准的方法100还包括调整130多视图背光和光阀阵列的相对位置,以最小化所显示的对准图案内的单位单元的误差测量。具体地,调整130相对位置以最小化误差测量可以包括相对于光阀阵列旋转多视图背光和相对于光阀阵列平移多视图背光中的一个或两个。
[0069]
在一些实施例中,最小化的误差测量可以包括确定对准图案的每个单位单元之间的相对亮度差。例如,可以确定或测量每个单位单元的亮度。根据一些实施例,然后,相对亮度差可以包括对准图案的每个单位单元的对应视图块之间的亮度差。在另一实施例中,例如,所确定的亮度可以是单位单元的整体亮度,并且可以在对准图案的不同单位单元之间确定相对亮度差。
[0070]
图5a示出了根据与在此描述的原理一致的实施例,在调整130多视图背光和光阀阵列的相对位置以最小化误差测量之前的照明的光阀阵列的对准图案200的平面图。图5b示出了根据与在此描述的原理一致的实施例的示例中在调整130多视图背光和光阀阵列的相对位置以最小化的误差测量之后的图5a的对准图案200的平面图。在图5a
‑
图5b中,使用对准图案200的单位单元210的视图块212内的阴影来描绘亮度,其中更密集的阴影表示更高的亮度或更亮的视图块212。如图5a所示,对准图案200的不同单位单元210具有显著不同的亮度,尤其是在不同单位单元210的各个视图块212中。然而,在调整130多视图背光和光阀阵列的相对位置以最小化误差测量之后,不同的单位单元210具有非常相似的亮度,如图5b所示。因此,在调整130之后,由相对亮度差表示的误差测量已经最小化,如图5b所示。
[0071]
在一些实施例中,调整130相对位置以最小化误差测量包括最小化所显示的对准图案中的单位单元亮度质心相对于单位单元的目标位置的位置位移。也就是说,可以光学地或以其他方式确定对准图案的每个单位单元的单位亮度的质心。然后,可以将对准图案的各个单位单元的单位亮度的质心位置与每个各个单位单元的目标位置进行比较,作为要最小化的误差测量。也就是说,可以采用单位单元亮度质心的位置位移作为误差测量。在一些实施例中,单位单元亮度质心的位置位移包括最小化在所显示的对准图案中的各个单位单元亮度质心的观察位置与各个单位单元的对应目标位置之间的平方差之和。
[0072]
图6示出了根据与在此描述的原理一致的实施例的示例中的单位单元亮度质心214的图形表示。具体地,图6示出了针对分布在关阀阵列上的对准图案中的对应多个单位单元测量或确定的单位单元亮度的多个质心214,例如,在图5a
‑
图5b中所示的对准图案200和单位单元210。例如,可以在调整130相对位置以最小化误差测量期间确定在图6中所示的单位单元亮度质心214。还示出了单位单元的目标位置216,例如,对于每个单位单元目标位置,使用“圆圈
‑
x”。在调整130多视图背光和光阀阵列的相对位置以最小化误差测量期间,可以最小化各个单位单元亮度质心214相对于目标位置216的位置位移。
[0073]
根据在此描述的原理的其他实施例,提供了一种多视图显示器背光对准系统。图7示出了根据与在此描述的原理一致的实施例的示例中的多视图显示器背光对准系统300的框图。根据各种实施例,多视图显示器背光对准系统300可用于促进多视图显示器的制造。例如,对准方法可以便于对准光阀阵列和多视图显示器的多视图背光,例如,其中多视图显示器可以基本上类似于以上通过在图1c中的示例所示的多视图显示器10。
[0074]
根据各种实施例,在图7中所示的多视图显示器背光对准系统300包括具有光阀312阵列和多视图背光314的多视图显示器310。光阀阵列被配置为在被多视图背光314照明时提供包括多个单位单元的显示的对准图案。例如,阵列的光阀312可以由显示驱动器(未示出)驱动以提供所显示的对准图案。此外,根据各种实施例,多个单位单元的单位单元彼此间隔开,每个单位单元包括具有对应于多视图显示器310的不同视图或等效于要由多视图显示器310显示的多视图图像的不同视图方向的多个视图块。此外,多个视图块的视图块在单位单元内具有对应于不同视图的排列的排列。在一些实施例中,对准图案和多个单位单元可以基本上类似于在将多视图背光与多视图显示器的光阀阵列对准的方法100中描述和使用的对准图案200和单位单元210,如上所述。
[0075]
在一些实施例中,光阀阵列312可以基本上类似于上述光阀阵列。例如,光阀阵列312可以包括基于电润湿的液晶光阀、电泳光阀和光阀中的一个或多个。
[0076]
在一些实施例中,多视图背光314可以基本上类似于以上关于将多视图背光与多视图显示器的光阀阵列对准的上述方法100描述的多视图背光。例如,多视图背光314可以包括光导和在光导上彼此间隔开的多束元件阵列。光导可以被配置为沿着光导的长度引导光作为被引导光。此外,根据各种实施例,多束元件阵列的每个多束元件可以被配置从光导散射出被引导光的一部分作为具有对应于多视图显示器310的视图的不同视图方向的方向的定向光束(例如,多个定向光束)。此外,在一些实施例中,每个多束元件的尺寸在光阀阵列的光阀尺寸的四分之一到两倍之间。
[0077]
如图7所示,多视图显示器背光对准系统300还包括定位平台320。定位平台320被配置为调整光阀阵列312和多视图背光314的相对位置。例如,定位平台320可以物理地移动光阀阵列和多视图背光314中的一个或两个,以调整相对位置。此外,由定位平台320提供的调整被配置为最小化所显示的对准图案内的单位单元的误差测量。根据各种实施例,基本上可以采用提供光阀阵列和多视图背光314之间的相对位置的调整的任何定位平台作为定位平台320。例如,定位平台320可以包括在x轴和y轴中的一个或两个上提供运动的微米平台。在另一示例中,定位平台320可以提供光阀阵列和多视图背光314的相对旋转,而代替或者除了x轴和y轴上的运动中的一个或两个。在一些实施例中,定位平台320可以包括机动平台,其被配置为提供多视图背光314和光阀阵列的相对旋转和相对平移中的一个或两个。
[0078]
在一些实施例中(在图7中未示出),多视图显示器背光对准系统300还可以包括相机。相机被配置为对提供在多视图显示器310上的所显示的对准图案成像。根据各种实施例,可以根据所显示的对准图案的捕获图像来确定误差测量。例如,如上所述,可以使用图形处理单元(gpu)来分析捕获的图像以测量亮度或确定亮度质心。然后,例如,可以由gpu或另一处理器从亮度测量中产生误差测量。
[0079]
根据在此描述的原理的其他实施例,提供了一种自动多视图显示器背光对准系统。图8示出了根据与在此描述的原理一致的实施例的示例中的自动多视图显示器背光对准系统400的框图。如图8所示,自动多视图显示器背光对准系统400包括具有光阀412阵列的多视图显示器410,该多视图显示器410被配置为在被多视图显示器410的多视图背光414照明时提供所显示的对准图案。根据各种实施例,对准图案包括多个间隔开的单位单元。此外,每个间隔开的单位单元包括具有对应于多视图显示器的不同视图的不同视图方向的多个视图块。此外,根据各种实施例,间隔开的单位单元的视图块具有对应于不同视图的排列的排列。
[0080]
在一些实施例中,多视图显示器410基本上类似于上述多视图显示器310。类似地,包括视图块和单位单元的对准图案可以基本上类似于也如上所述的对准图案200、视图块212、单位单元210。
[0081]
在图8中所示的自动多视图器显示背光对准系统400还包括电动定位平台420和反馈控制器430。电动定位平台420被配置为调整多视图显示器410的光阀阵列和多视图背光的相对位置。反馈控制器430被配置为驱动电动定位平台420以最小化所显示的对准图案内的间隔单位单元的误差测量。例如,反馈控制器430可以包括处理器和电机控制器。
[0082]
根据一些实施例,自动多视图显示器背光对准系统400还可以包括相机440,其被配置为捕获在多视图显示器410上提供的所显示的对准图案的图像,如图8所示。在这些实施例中,反馈控制器430可以被配置为确定由相机440提供的所显示的对准图案图像的捕获
图像的误差测量。在一些实施例中,误差测量可以包括对准图案的每个单位单元之间的相对亮度差和所显示的对准图案中的单位单元亮度质心相对于单位单元的目标位置的位置位移中的一个或两个。
[0083]
此外,反馈控制器430可以确定相对亮度差或单位单元亮度质心,然后实施多种不同分析技术中的任何一种来确定并最小化误差测量。根据各种实施例,以下是对可以由反馈控制器430的处理器实现以提供误差最小化的这些技术中的一些技术的更详细讨论。
[0084]
使用多视图对准图案量化对准
[0085]
根据各种实施例,多视图对准亮度图案可以指定可以对应于多视图显示器的多个超像素的多个单位单元。例如,每个单位单元可以具有中心坐标(x
i
,y
i
)关于用于确定和最小化误差测量的示例性过程,成像设备或相机可以被配置为在一个或多个设计的观察位置处捕获被照明的背光和光阀阵列组件的图像。此外,这种成像设备或相机可以配置在背光和光阀阵列组件的视场(fov)的中心。根据所显示的亮度图案的捕获图像,可以使用相机校准来计算照明中心坐标l(x,y)。例如,n个单位单元中的每一个内的像素质心可以通过公式(2)计算为:
[0086]
对于单位单元i的域中的x,y
ꢀꢀꢀ
(2)
[0087]
根据各种实施例,可以使用各种合适的技术来计算对准的误差测量。在一个实施例中,可以例如通过公式(3)计算和平方残差(ssr)值,以评估各个质心和单位单元的各个中心、或者对于相机观察位置期望的某个其他坐标(x
i
,y
i
)之间的距离r:
[0088][0089]
其中,是沿y轴的质心坐标,y
i
是沿y轴的单位单元的中心坐标,是沿x轴的质心坐标,x
i
是沿x轴的单元格的中心坐标。
[0090]
在另一实施例中,给定一组质心坐标和一组理想或参考点(x
i
,y
i
),例如通过使用仿射变换或单应(homography)变换,可以计算变换矩阵以最小化ssr。可以将计算出的变换矩阵分解成几何变换,其可以由一个或多个处理器和/或分析组件使用,以确定背光和光阀阵列之间未对准的严重程度。
[0091]
根据一些实施例,代替分解,可以直接计算旋转、平移和拉伸变换。在一个示例中,可以利用作为描述平移、旋转和缩放(或拉伸)的透视变换的单应性。在数学上,单应矩阵h
p
可以被分解为描述缩放的k
p
矩阵、描述旋转的r
p
矩阵和描述平移的t
p
矩阵,如下所示:
[0092]
h
p
=k
p
[r
p
|t
p
]
ꢀꢀꢀ
(4)
[0093][0094]
[0095][0096]
其中,s
x
是沿x轴的像素空间中的拉伸因子,s
y
是沿y轴的像素中的拉伸因子,r是像素空间中的旋转因子,t是像素空间中的平移因子。
[0097]
此外,对于每个矩阵元件,通过阈值/不合格阈值可以被配置为根据背光和光阀阵列之间的对准程度来微调质量控制度。在此,例如,可以基于对多视图显示器外观的影响来定义通过阈值/失败阈值。以这种方式,这种方法在质量控制方面提供了比使用ssr技术更精细的各种对应/定制粒度。此外,可以将按像素单位测量的这些参数转换为物理单位。根据以物理单位换算的测量值,可以在质量控制规范中定义要求。
[0098]
使用多视图对准图案的主动对准
[0099]
根据各种实施例,可以基于如上所述的测量的未对准参数来调整显示器和背光的对准。例如,调整这些组件的对准可以作为多视图显示器制造商的内部过程来执行。在另一示例中,也可以由外部多视图显示器制造商在产品组装地点执行调整过程,以确保背光和光阀阵列之间的对准没有改变。
[0100]
在一些实施例中,可以利用数值优化来改善检测到的背光和光阀阵列之间的未对准。此外,可以迭代地执行这种优化以改善背光和光阀阵列之间的对准。在一个示例性迭代中,使用相机或光传感器捕获多视图显示器的图像。接下来,计算ssr值和/或可以最小化所计算的ssr值的一个或多个变换以生成度量函数。给定度量函数,可以修改、操纵或以其他方式更新各种多视图背光对准参数,以便最小化由度量函数计算的结果。例如,可以执行对诸如旋转、平移和到光阀阵列的距离的一个或多个对准参数的调整,以最小化度量函数的结果。
[0101]
在其他实施例中,计算可以最小化ssr的一个或多个几何或透视变换。接下来,可以将变换分解成一组一个或多个对准参数。例如,这样的变换可以分解为平移值(图像像素中的t
x
,t
y
)、旋转值(平面中的θ,围绕光轴的度数)和拉伸值(无量纲中的s
x
,s
y
)中的一个或多个。
[0102]
将像素计算转换为物理单位计算
[0103]
如上所述,可以使用照明的对准图案的图像分析来计算对准参数。那些以图像像素计算的参数可以以物理单位进行转换,从而可以执行物理调整以对准背光和光阀阵列。例如,要调整物理背光对准以校正平移未对准,需要将图像像素单位中的平移参数值转换为物理单位中的值。
[0104]
根据各种实施例,可以使用各种技术将转换值转换为物理单位的值。例如,多视图显示器的尺寸通常是已知的。给定显示器的尺寸,可以将图像像素单位转换为显示像素单位。然后,给定单位单元(以像素为单位的dx,dy)内的每个“单视图区”或视图块的尺寸,可以将显示像素的单位转换为视图的单位。在一个示例中,这种转换可以通过从质心减去单位单元中心来计算,如下所示:
[0105]
[0106]
其中,是质心的坐标值,(x
i
,y
i
)是单位单元的中心的坐标值,且(dx,dy)是对准图案的单位单元内的视图块的尺寸。
[0107]
此外,在一些实施例中,可以根据不同的图案设计来计算不同的转换。一旦在视图中表示了质心,这些坐标值就可以基于多视图显示器的尺寸和几何形状转换为物理长度单位。对于每个多视图显示器,对准图案图像中的一个视图的平移等效于长度的平移(以微米为单位的δ
x,y
)。因此,显示器的以微米为单位的全局平移可以计算如下:
[0108][0109]
其中,[t
x
,t
y
]是平移是像素空间,δ
x
是x轴上的单个视图的尺寸值(以微米为单位),dx是x轴上的视图块的尺寸(以像素为单位),δ
y
是y轴上的单个视图的尺寸值(以微米为单位),并且dy是y轴上的视图块的尺寸(以像素为单位)。
[0110]
类似地,可以将旋转转换为物理单位。通过显示器旋转引起的垂直视图偏移计算如下:
[0111][0112]
其中,θ是旋转未对准因子,dy是在y轴上视图块的尺寸,w
p
是沿显示器宽度(x轴)的像素数。然后,按如下方式计算新角度:
[0113][0114]
其中,δ
y
是以微米为单位的y轴上单个视图的尺寸值,w是以微米(x轴)为单位的显示宽度。
[0115]
拉伸(s
x
,s
y
)可按如下方式转换为物理量:
[0116][0117][0118]
其中,h
p
是y轴上显示器高度上的像素数,w
p
是x轴上显示器宽度上的像素数,s
x
是像素空间中的拉伸因子,s
y
是像素空间中的拉伸因子,δ
x
是以微米为单位的x轴上单个视图的尺寸值,dx是以像素为单位的x轴上的视图块的尺寸,δy是以微米为单位的y轴上单个视图的尺寸值,dy是以像素为单位的y轴上视图块的尺寸。注意,拉伸可以通过改变多视图背光和光阀阵列之间的工作距离来补偿。对于给定值s
x
和s
y
,可以计算背光和光阀阵列之间的可能距离,并将其应用于相应地调整背光和lcd之间的对准。
[0119]
因此,已经描述了将多视图背光与光阀阵列对准的方法以及提供多视图显示器的多视图背光和光阀阵列的对准的各种多视图显示器背光对准系统的示例和实施例。应当理解,上述示例仅是表示在此描述的原理的许多特定示例中的一些示例。显然,本领域技术人员可以在不偏离以下权利要求所定义的范围的情况下容易地设计出许多其他排列。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。