1.本发明涉及诸如镜筒的光学设备。
背景技术:
2.例如,在日本特许第6381382号公报中公开的可更换镜筒构造有:布置于内周侧的凸轮筒、布置于其外周侧的引导筒以及进一步布置于其外周侧的变焦操作环。
3.在日本特许第6381382号公报的构造中,在引导筒的外周设置有具有变焦操作环的径嵌合部。变焦操作环通过该径嵌合部沿周向可旋转地安装于引导筒的外周。当该变焦操作环旋转时,直进筒沿光轴方向移动但不与该旋转连动地沿周向旋转,并且凸轮筒沿周向旋转。
4.在以上构造中,重要的是在引导筒和变焦环的定位中抑制引导筒和变焦操作环之间的径嵌合部的咔哒声。变焦环的定位在定位直进筒期间很重要,并且该定位很大程度上涉及光学设备的光学性能。为了抑制引导筒和变焦操作环之间的径嵌合部的咔哒声,重要的是,将引导筒的嵌合部形成为在其整周上嵌合而没有缺口部。缺口部在该缺口部所处的位置处引起咔哒声的增大。
5.另一方面,为了进一步增大变焦透镜的放大倍率,通常需要增加各组的进给量。另外,为了在确保凸轮环的旋转量的情况下将各组的凸轮槽有效地布置于凸轮环,共用(共享)设置在引导筒中的各组的直进槽被认为是有效的。
6.然而,在共享各组的直进槽的情况下,直进槽的长度变长,因此存在在光轴方向上的位置处与引导筒的径嵌合部重叠的问题。在这种情况下,通过贯通手段对引导筒设置直进槽,使引导筒的径嵌合部形成有缺口。由此,使利用变焦环进行的定位受到了不利的影响,结果,存在光学设备的光学性能劣化的担忧。
技术实现要素:
7.本发明的目的是提供例如具有良好的透镜定位精度和优异的光学性能的光学设备。
8.根据本发明,提供了一种光学设备,其包括:直进筒,其构造成沿光轴方向在透镜组上移动;以及引导筒,其具有引导槽部,所述引导槽部构造成引导所述直进筒沿所述光轴方向的移动,其中,在所述引导槽部中,第一引导槽部在所述光轴方向上形成为在外径侧具有底部,并且第二引导槽部在所述光轴方向上形成为从所述外径侧到内径侧的通孔,并且所述第一引导槽部和所述第二引导槽部彼此连接,并且具有各自的使用区域,所述第一引导槽部的使用区域和所述第二引导槽部的使用区域被构造成在所述光轴方向上彼此部分重叠。
9.从以下参照附图对示例性实施方式的说明,本发明的其它特征将变得明显。
附图说明
10.图1是示出实施例1的系统构造的图。
11.图2是实施例1的光学设备的截面图。
12.图3是从外周侧观察的实施例1的凸轮环的展开图。
13.图4a至图4c是示意性地示出实施例1的引导筒的引导槽的构造的图。
14.图5a至图5c是实施例1的引导筒的引导槽在与光轴正交的方向上的截面图。
15.图6是示意性地示出实施例1的引导筒的引导槽的加工的图。
16.图7a和图7b是实施例1的引导筒的引导槽的在与光轴正交的方向上的加工的截面图。
具体实施方式
17.在下文中,将参照附图使用实施例来说明本发明的优选实施方式。同时,在每个附图中,相同的构件或要素由相同的附图标记表示,并因此将省略或简化其重复说明。
18.(第一实施方式)
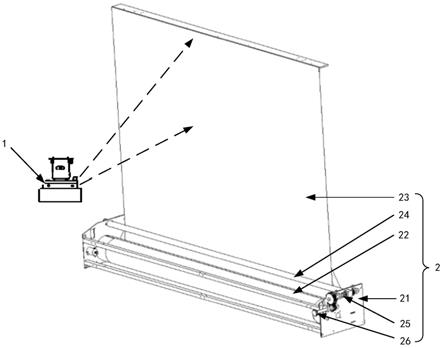
19.图1是示出本实施例的镜筒(光学设备)101和相机201的系统构造的示例的图。在下文中,将参照图1说明根据本实施例的镜筒101和相机201的系统构造。
20.镜筒101可以包括第一组镜筒401、调焦镜筒404、光圈单元405、后组镜筒410、图像模糊校正单元411和第五组镜筒412。另外,镜筒还可以包括陀螺仪传感器106、镜头侧主cpu 107、图像模糊校正驱动源108、光圈驱动源109和调焦驱动源110。此外,在各镜筒中保持透镜组。
21.第一组镜筒401固定到相机201(它们之间隔着接口414),并且通过镜筒101内的光学成像系统通过在由相机201保持的成像元件202上形成像而对被摄体进行摄像。调焦镜筒404还用作保持后面将说明的第四组透镜454的保持件,该调焦镜筒404通过驱动机构相对于后组镜筒410在光轴方向(推力方向)上移动,并执行焦点调节。这里,术语“光轴方向”是指沿着光轴的方向(光学成像系统的光轴延伸的方向)。
22.光圈单元(光量调节单元)405调节入射于第一组透镜451并被引导至成像元件的光量。光圈驱动源109是光圈单元405的驱动源。图像模糊校正单元(图像模糊校正装置)411校正例如由于相机抖动等引起的图像失真。图像模糊校正驱动源108是图像模糊校正单元411的驱动源。陀螺仪传感器(角速度传感器)106例如是检测由于相机抖动等引起的振动分量的传感器。另外,陀螺仪传感器106还用作检测这些抖动的抖动检测装置(检测单元)。
23.镜头侧主cpu 107用作全面控制整个镜头的驱动或进行计算的镜头侧控制装置(镜头侧控制单元)。另外,通过从镜头侧主cpu 107发出驱动命令(指令)来驱动光圈驱动源109、调焦镜筒404和光圈单元405。当执行图像模糊校正控制时,镜头侧主cpu 107使用陀螺仪传感器106的检测值来计算抖动校正量,并向图像模糊校正驱动源108发送指令。通过在与光轴x正交的y方向(平摇方向)和p方向(俯仰方向)上驱动图像模糊校正单元411来执行抖动校正。
24.图像模糊校正单元411和图像模糊校正驱动源108还用作图像模糊校正装置(图像模糊校正单元)。另外,镜头侧主cpu 107还用作根据陀螺仪传感器106的检测值来确定镜筒101或相机201的保持状态的确定装置(确定单元)。
25.相机201可以包括成像元件202、相机侧主cpu 203、释放钮204、主电源205和图像记录介质206。
26.成像元件202捕捉(光电转换)由已经通过光学成像系统的光通量形成的被摄体像。相机侧主cpu 203用作控制相机201内的各种装置的操作的相机侧控制装置(相机侧控制单元)。另外,通过设置于接口的触点块(未示出)将电力从相机侧主cpu 203供给至镜筒101,并与镜头侧主cpu 107交换其它摄像信息。
27.释放钮204是具有两阶段推动构造的操作构件。释放钮204的第一阶段称为sw1,第二阶段称为sw2。在sw1中,执行用于摄像开始准备的指令,诸如从摄像待机返回、开始相机抖动校正、开始自动调焦或开始测光。在sw2中,执行摄像并执行用于在图像记录介质206中记录图像的指令。
28.图2是镜筒101的截面图,该镜筒用于作为本实施例的光学设备的可更换镜头。另外,在以下说明中,将被摄体侧定义为待被摄像的被摄体的所在侧,并且被摄体侧是在图2的图面中的左侧。将像面侧定义为相机的成像元件的所在侧,并且像面侧是在图2的图面中的右侧。同时,尽管在本实施例中将说明可更换镜头,但相同的构造也能够应用于诸如集成有镜头的数字相机或摄像机的摄像设备的镜筒。
29.镜筒101保持光学成像系统(光学构件),该光学成像系统包括第一组透镜451、第二组透镜452、第三组透镜453、第四组透镜454和第五组透镜455。
30.第一组透镜451由第一组镜筒401保持。直进筒417被固定至第一组镜筒401。第二组透镜452由图像模糊校正单元411保持。另外,第二组透镜452能够通过在垂直于光轴的方向上移动来校正图像模糊。图像模糊校正单元411被固定到引导筒474。同时,图像模糊校正单元411在光轴方向上不因变焦操作而移动。
31.第三组透镜453由后组镜筒410保持。第四组透镜454由调焦镜筒404保持,并且在设置于调焦镜筒404中的引导机构介于第四组透镜454和调焦镜筒404之间的情况下由后组镜筒410保持第四组透镜454。第五组透镜455由第五组镜筒412保持。光圈单元405调节光量,并且被固定至后组镜筒410。引导筒474通过螺钉固定至位于引导筒474的外径(外周部)侧的后固定筒472,并且设置有多个直进槽。
32.凸轮环416是可旋转地装配到引导筒474的内周的凸轮环(凸轮构件)。在凸轮环416的周向上设置有多个凸轮槽。
33.变焦环(变焦操作环)435可旋转地由引导筒474保持。在下文中,将说明本实施例的变焦机构。变焦环435设置有多个凸轮槽。当变焦环435被手动旋转时,直进筒417被构造成使得作为引导构件的凸轮从动件491与变焦环435的凸轮槽(第一凸轮槽部)和引导筒474的直进槽474a接合,并且由此凸轮从动件491在光轴方向上滑动和移动。
34.基板431是布置有驱动ic等的印刷基板,并且被固定至后固定筒472。通过螺钉将外观环427与接口414一起固定至后固定筒472。通过螺钉将前固定筒423固定至后固定筒472。
35.手动调焦环(mf)单元419可旋转地支撑在前固定筒423周围。当手动调焦环单元419旋转时,通过传感器(未示出)检测到旋转,并根据旋转量执行手动焦点调节。af马达480被固定到后组镜筒410,并驱动调焦镜筒404。
36.图3是从外周侧观察的本实施例的凸轮环416的展开图。图3所示的虚线部分表示
引导筒474的直进槽。这里,关于图3所示的凸轮槽和直进槽,凸轮环416的凸轮槽(第二凸轮槽部)416a是直进筒417的凸轮槽。凸轮环416的凸轮槽(第三凸轮槽部)416b是后组镜筒410的凸轮槽。凸轮环416的凸轮槽416c是第五组镜筒412的凸轮槽。这里,直进槽(第二引导槽部)474a和直进槽(第一引导槽部)474b是引导筒474的引导槽。引导筒474的直进槽474a是直进筒417的直进槽。引导筒474的直进槽474b是与后组镜筒410和第五组镜筒412共用的直进槽。
37.如上所述,当手动旋转变焦环435时,直进筒417被构造成使得凸轮从动件(第一凸轮从动件)491与变焦环435的凸轮槽和引导筒474的直进槽474a接合,由此凸轮从动件491在光轴方向上滑动和移动。设置于直进筒417的凸轮从动件491也与凸轮环416的凸轮槽416a接合。因此,当直进筒417在光轴方向上移动时,凸轮环416绕光轴旋转。
38.后组镜筒410与凸轮环416的凸轮槽416b和引导筒474的直进槽474b在它们之间介入有凸轮从动件(第二凸轮从动件)492的情况下接合。第五组镜筒412与凸轮环416的凸轮槽416c和引导筒474的直进槽474b在它们之间介入有凸轮从动件(第三凸轮从动件)493的情况下接合。由此,随着凸轮环416旋转,凸轮从动件492和凸轮从动件493滑动,并且后组镜筒410和第五组镜筒412在光轴方向上移动。以这种方式,通过手动旋转变焦环435,直进筒417、后组镜筒410和第五组镜筒412在光轴方向上移动从而执行变焦操作。
39.这里,引导筒474的直进槽474a和直进槽474b布置于相同相位。由此,凸轮槽416a、凸轮槽416b和凸轮槽416c也布置于相同相位。另外,为了抑制由凸轮槽416a、凸轮槽416b和凸轮槽416c保持的透镜的倾斜,需要使凸轮交角尽可能小。为了减小凸轮交角,必须使凸轮的展开长度长(增大凸轮旋转角)。在使凸轮旋转角大的情况下,变得难以将直进槽中的各个凸轮布置于偏移相位。在将直进槽中的各个凸轮布置于偏移相位的情况下,凸轮的配置效率劣化。结果,凸轮的长度增加,这导致了整个镜头增大的问题。
40.在本实施例中,形成于变焦环435的径嵌合部435c和形成于引导筒474的径嵌合部474c彼此径向嵌合,使得变焦环435可旋转地被引导筒474保持。这里,径嵌合部435c和径嵌合部474c均形成为在其整周上无缺口地嵌合。通过将径嵌合部435c和径嵌合部474c形成为在其整周上无缺口地嵌合,能够以良好的精度确定变焦环435相对于引导筒474的偏心位置,因此可以以良好的精度确定直进筒417的倾斜度。由此,在本实施例中,以良好的精度确定了第一组透镜451的倾斜位置,因此可以维持高的光学性能。
41.为了实现引导筒474的径嵌合部474c形成为在其整周上嵌合,通过从引导筒474的内径侧进行加工(内部加工)将引导筒474的直进槽474b形成为在外径侧具有底部的槽(有底槽)且为沿着光轴方向的直进槽。另一方面,由于引导筒474位于直进筒417的内径侧,并且凸轮环416进一步位于内径侧,所以直进槽474a被形成为贯通槽。因此,直进槽474a形成了通过从引导筒474的外径侧进行加工(外部加工)而贯通到内径侧的通孔(贯通槽),并被形成为沿着光轴方向的直进槽。另外,直进槽474a形成为在光轴方向上不与引导筒474的径嵌合部474c重叠。以这种方式,通过不同的加工装置(加工单元)使直进槽474b的加工和直进槽474a的加工彼此分离,因此可以使径嵌合部474c全周化。
42.这里,下面将参照图4a至图4c和图5a至图5c详细说明引导筒474的直进槽474b和直进槽474a。
43.图4a至图4c是示意性地示出作为本实施例的引导筒474的引导槽的直进槽474a和
直进槽474b的构造的图。图5a至图5c是沿光轴方向观察本实施例的引导筒474的引导槽时的截面图。图4a是引导筒474的立体图。图4b是从内径侧观察的引导筒474的直进槽474a和直进槽474b的图。图4c是沿着图4b中的d
‑
d的截面图。在图4c所示的截面图中,图的上侧是内径侧,图的下侧是外径侧。
44.这里,如图4a至图4c所示,直进槽474b位于内径侧,直进槽474a位于外径侧,并且直进槽474b和直进槽474a彼此连接。如图4b所示,m是直进槽474a在光轴方向上的范围,n是直进槽474b在光轴方向上的范围。在图中,n和m在光轴方向上具有彼此部分重叠的区域。即使在n和m彼此重叠的区域中,直进槽474a和直进槽474b也布置成在与光轴正交的方向(径向)上彼此不重叠。以这种方式,在直进槽474b和直进槽474a的整个使用区域中,槽在与光轴正交的方向上的宽度是恒定的,并且考虑到在整个使用区域中特性不会改变。
45.图5a是沿着图4c中的a
‑
a的截面图。图5b是沿着图4c中的b
‑
b的截面图。图5c是沿着图4c中的c
‑
c的截面图。同时,图5a至图5c中所示的每个截面都对应于图2的截面图中的各个构件的位置。
46.这里,如图5a至图5c所示,将直进槽474a的槽宽度定义为贯通直进槽宽度b,并将作为有底槽的直进槽474b的槽宽度定义为有底直进槽宽度a。直进槽474a在光轴方向上的上述范围m是不与光轴方向上的范围n重叠的范围,并且如图5c所示,将比直进槽474a的使用区域(使用范围)更靠内侧的槽(退避槽、第三引导槽部)的宽度定义为退避槽宽度c。在图5a中,直进筒417侧的凸轮从动件491必须从外周侧避开直进槽474b,并通向内周侧的凸轮环416。在贯通直进槽宽度b小的情况下,仅需要待接合的辊(凸轮从动件)具有相同的直径,这导致易于避开。这使得可以确保直进筒417的钩挂量长。
47.在这种情况下,有底直进槽宽度a、贯通直进槽宽度b和退避槽宽度c之间的关系由以下表达式(1)表示。
48.贯通直进槽宽度b<退避槽宽度c<有底直进槽宽度a
…
(1)
49.在满足表达式(1)的关系的情况下,可加工性优异,并且可以实现直进槽474a和直进槽474b在使用区域中具有恒定形状的加工。
50.在下文中,将参照图6以及图7a和图7b说明满足表达式(1)的关系式的加工方法。图6是示意性地示出作为本实施例的引导筒474的引导槽的直进槽474a和直进槽474b的加工的图。图7a和图7b是示意性地示出直进槽474a和直进槽474b的加工的图6的截面图。图7a是示出沿着图6中的g
‑
g的截面的截面图。图7b是示出沿着图6中的h
‑
h的截面的截面图。
51.直进槽474a和直进槽474b的加工是使用用于形成槽的切削工具进行的。在本实施例中,例如,将端铣刀用作切削工具。端铣刀494切削并加工比直进槽474a和直进槽474b的使用范围更靠内侧的槽。当加工比直进槽474a和直进槽474b的使用范围更靠内侧的退避槽时,端铣刀494形成了贯通直进槽宽度b和退避槽宽度c。
52.端铣刀495切削并加工直进槽474b。端铣刀495在加工直进槽474b时形成有底直进槽宽度a。另外,在加工时,端铣刀495将贯通直进槽宽度b和退避槽宽度c与倾斜面部分连接。将该倾斜面部分在与光轴正交的方向上的宽度定义为d。底部474d是直进槽474b的底部。另外,底部474d在与光轴正交的方向上的位置被设定为在倾斜面部分的在与光轴正交的方向上的宽度d内。通过如上所述的设定,仅通过利用端铣刀494从引导筒474的外侧起对光轴方向上的范围m进行加工并且利用端铣刀495从引导筒474的内侧起对光轴方向上的范
围n进行加工,就能够实现具有上述形状的槽。另外,在本实施例中,尽管使用端铣刀作为切削工具来加工直进槽474a和直进槽474b,但本发明不限于此,还可以通过端铣刀之外的能够执行相同加工的切削工具来执行加工。
53.还能够考虑利用端铣刀495在光轴方向上的范围m和在光轴方向上的范围n两者进行内部加工的方法,但在这种情况下,增加了加工时间并且增加了加工成本。
54.另外,在内部加工中,由于执行上述加工的加工机器的特性,难以采用大的加工长度,因此可能会限制加工长度。即使在这种情况下,由于通过本实施例中的加工方法能够将内部加工范围设定得较短,因此不太可能受到加工限制,并且可以执行任何加工。
55.如上所述,通过不同的加工手段对上述直进槽474a和直进槽474b进行了加工,使得径嵌合部435c和径嵌合部474c均能够形成为在其整周上无缺口地嵌合。由此,由于能够以良好的精度确定直进筒417的倾斜,因此以良好的精度确定了第一组透镜451的倾斜位置,并因此可以提供具有优异光学性能的光学设备。
56.虽然已经参照示例性实施方式说明了本发明,但是应当理解,本发明不限于所公开的示例性实施方式。权利要求书的范围应符合最宽泛的解释,以包含所有的这些变型、等同结构和功能。
57.本技术要求2020年5月11日提交的日本专利申请no.2020
‑
083261的优先权,其全部内容通过引用合并于此。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。