技术特征:
1.一种对准多视图背光与多视图显示器的光阀阵列的方法,所述方法包括:在所述光阀阵列上建立具有彼此隔开的单位单元的对准图案,所述对准图案的每个单位单元包括具有对应于所述多视图显示器的不同视图的不同视图方向的多个视图块;使用所述多视图背光照明所述光阀阵列以显示所述对准图案;以及调整所述多视图背光和所述光阀阵列的相对位置以最小化在所显示的对准图案内的所述单位单元的误差测量,其中,在每个单位单元内的视图块的排列对应于所述多视图显示器的所述视图的排列。2.如权利要求1所述的对准多视图背光的方法,其中,所述多视图显示器的视图的所述排列包括顺序排列的视图的一维阵列,所述对准图案的每个单位单元具有对应的顺序排列的视图块的一维阵列。3.如权利要求1所述的对准多视图背光的方法,其中,所述多视图显示器的视图的所述排列包括视图的二维阵列,所述对准图案的每个单位单元具有对应的视图块的二维阵列。4.如权利要求3所述的对准多视图背光的方法,其中,视图的所述二维阵列是以两行两列排列的四个视图的二乘二阵列。5.如权利要求1所述的对准多视图背光的方法,其中,所述多视图背光包括:光导,其被配置为引导光以作为被引导光;以及多束元件阵列,其通过所述光导彼此间隔开,所述多束元件阵列的每个多束元件被配置为从所述光导散射出所述被引导光的一部分作为具有对应于不同视图方向的方向的多个定向光束以照明所述光阀阵列,其中,每个多束元件的尺寸在所述光阀阵列的光阀尺寸的四分之一到两倍之间。6.如权利要求5所述的对准多视图背光的方法,其中,所述多束元件阵列的多束元件包括被配置为衍射地散射出所述被引导光的衍射光栅、被配置为反射地散射出所述被引导光的微反射元件,以及被配置为折射地散射出所述被引导光的微折射元件中的一个或多个。7.如权利要求1所述的对准多视图背光的方法,其中,调整相对位置包括相对于所述光阀阵列旋转所述多视图背光和相对于所述光阀阵列平移所述多视图背光中的一个或两个。8.如权利要求1所述的对准多视图背光的方法,其中,所述误差测量包括所述对准图案的每个单位单元之间的相对亮度差。9.如权利要求8所述的对准多视图背光的方法,其中,所述相对亮度差包括所述对准图案的每个所述单位单元的对应的视图块之间的亮度差。10.如权利要求1所述的对准多视图背光的方法,其中,调整相对位置以最小化误差测量包括:最小化在所显示的对准图案中的单位单元亮度质心相对于所述单位单元的目标位置的位置位移。11.如权利要求10所述的对准多视图背光的方法,其中,最小化所述单位单元亮度质心的位置位移包括:最小化在所显示的对准图案中的各个单位单元亮度质心的观测位置与所述各个单位单元的对应的目标位置之间的平方差之和。12.一种多视图显示器背光对准系统,包括:多视图显示器,其具有光阀阵列和多视图背光,所述光阀阵列被配置为在由所述多视图背光照明时提供包括多个单位单元的显示的对准图案;以及
定位平台,其被配置为调整所述光阀阵列和多视图背光的相对位置以最小化在所显示的对准图案内的所述单位单元的误差测量,其中,所述多个单位单元的单位单元彼此间隔开,每个单位单元包括多个视图块,所述视图块具有对应于所述多视图显示器的不同视图的不同视图方向且具有对应于所述不同视图的排列的排列。13.如权利要求12所述的多视图显示器背光对准系统,还包括被配置为捕获在所述多视图显示器上提供的所显示的对准图案的图像的相机,所述误差测量是从所显示的对准图案的所捕获的图像中确定的。14.如权利要求12所述的多视图显示器背光对准系统,其中,所述多视图背光包括:光导,其被配置为引导光以作为被引导光;以及多束元件阵列,其通过所述光导彼此间隔开,所述多束元件阵列的每个多束元件被配置为从所述光导散射出所述被引导光的一部分作为具有对应于不同视图方向的方向的定向光束,其中,每个多束元件的尺寸在所述光阀阵列的光阀尺寸的四分之一到两倍之间。15.如权利要求12所述的多视图显示器背光对准系统,其中,所述定位平台包括电动平台,所述电动平台被配置为提供所述多视图背光和所述光阀阵列的相对旋转和相对平移中的一个或两个。16.如权利要求12所述的多视图显示器背光对准系统,其中,所述误差测量包括所显示的对准图案的每个单位单元之间的相对亮度差。17.如权利要求12所述的多视图显示器背光对准系统,其中,所述误差测量包括在所显示的对准图案中的单位单元亮度质心相对于所述单位单元的目标位置的位置位移。18.如权利要求17所述的多视图显示器背光对准系统,其中,最小化所述误差测量包括:通过使用所述定位平台调整所述光阀阵列和多视图背光的所述相对位置来最小化在所显示的对准图案中的各个单位单元亮度质心的观测位置与所述各个单位单元的对应的目标位置之间的平方差之和。19.一种自动的多视图显示器背光对准系统,包括:多视图显示器,其具有光阀阵列,所述光阀阵列被配置为在由所述多视图显示器的多视图背光照明时提供显示的对准图案;电动定位平台,其被配置为调整所述光阀阵列和多视图背光的相对位置;反馈控制器,其被配置为驱动所述电动定位平台以最小化在所显示的对准图案内的间隔开的单位单元的误差测量,其中,所述对准图案包括多个间隔开的单位单元,每个间隔开的单位单元包括多个视图块,所述试图块具有对应于所述多视图显示器的不同视图的不同视图方向且具有对应于所述不同视图的排列的排列。20.如权利要求19所述的自动多视图显示器背光对准系统,还包括被配置为捕获在所述多视图显示器上提供的所显示的对准图案的图像的相机,所述反馈控制器被配置为确定由所述相机提供的所显示的对准图案图像的所捕获的图像所述误差测量。21.如权利要求19所述的自动多视图显示器背光对准系统,其中,所述误差测量包括所述对准图案的每个单位单元之间的相对亮度差和在所显示的对准图案中的单位单元亮度
质心相对于所述单位单元的目标位置的位置位移中的一个或两个。22.如权利要求19所述的自动多视图显示器背光对准系统,其中,所述多视图背光包括:光导,其被配置为引导光以作为被引导光;以及多束元件阵列,其通过所述光导彼此间隔开,所述多束元件阵列的每个多束元件被配置为从所述光导散射出所述被引导光的一部分作为具有对应于不同视图方向的方向的多个定向光束,其中,每个多束元件的尺寸在所述光阀阵列的光阀尺寸的四分之一到两倍之间,并且其中所述多束元件阵列的多束元件包括被配置为衍射地散射出所述被引导光的衍射光栅、被配置为反射地散射出所述被引导光的微反射元件和被配置为折射地散射出所述被引导光的微折射元件中的一个或多个。
技术总结
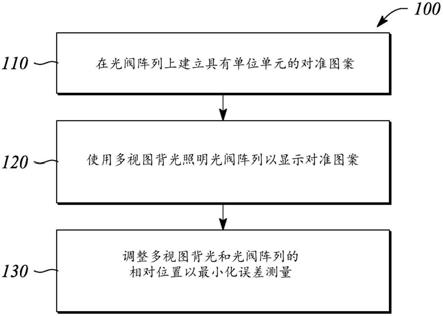
一种将多视图背光与多视图显示器的光阀阵列对准的方法采用对准图案,该对准图案包括彼此间隔开的单位单元并且具有对应于多视图显示器的不同视图的视图块。对准方法包括:在光阀阵列上建立对准图案,使用多视图背光照明光阀阵列以显示对准图案,以及调整多视图背光和光阀阵列的相对位置以最小化在所显示的对准图案内的单位单元的误差测量。多视图显示器背光对准系统,包括多视图显示器和配置为调整相对位置以最小化误差测量的定位平台。自动多视图显示器背光对准系统还包括反馈控制器,定位平台是电动的。位平台是电动的。位平台是电动的。
技术研发人员:T.霍克曼 D.A.法塔尔
受保护的技术使用者:镭亚股份有限公司
技术研发日:2020.04.02
技术公布日:2021/11/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。