1.本实用新型属于机械手设备技术领域,本实用新型涉及一种切片机自动上下料单桁架机械手。
背景技术:
2.现有技术中应用的传统的切片机上下料都是人工,耗费人力,劳动强度大,容易磕碰导致损坏工件。同时,生产安全性低,容易造成风险。并且生产效率低,生产成本高,现有的机械手横向距离长。占用空间大。
技术实现要素:
3.本实用新型的目的是克服上述背景技术中的不足,提供一种切片机自动上下料单桁架机械手,该机械手替代原有人工上下料,实现自动上下料,缩短y轴横向长度,节省节拍,降低人力成本的同时保证生产的效率和产量。
4.本实用新型解决其技术问题所采用的技术方案是:一种切片机自动上下料单桁架机械手,包括桁架、x轴、z轴、y轴、机械手;所述x轴、z轴、y轴设置在桁架上,所述x轴上设有x轴导向机构,所述z轴上设有z轴导向机构,所述y轴上设有y轴导向机构,所述x轴与机械手通过x轴导向机构相连接;所述y轴上还设有y轴滑板,所述y轴滑板两侧与y轴导向机构连接,所述y轴滑板上还设有夹爪气缸,所述x轴、z轴、y轴上分别对应设有x轴电机、z轴电机、y轴电机;
5.所述x轴导向机构包括导向型材、钢轴、圆弧轴;所述圆弧轴上下两面分别连接有导向型材,且导向型材与圆弧轴连接的一侧设有半圆孔,所述圆弧轴一侧的上下两面分别嵌设钢轴,所述钢轴与导向型材通过导向型材的半圆孔活动连接;且钢轴贯穿导向型材。
6.所述x轴电机与x轴导向机构连接,所述x轴电机通过减速机连接齿轮齿条实现驱动。
7.所述y轴导向机构包括驱动气缸、直线导轨、凸轮随动器、一级驱动齿轮、被动齿轮、二级驱动齿轮;所述y轴滑板包括上下设置的y轴滑板a和y轴滑板b;所述驱动气缸与一级驱动齿轮相连接,一级驱动齿轮通过与一级驱动齿条啮合与y轴滑板a两侧连接,进而带动y轴滑板a移动,所述一级驱动齿条的另一端与被动齿轮连接,所述被动齿轮下端设有二级驱动齿轮,所述被动齿轮与二级驱动齿轮同轴设置,所述二级驱动齿轮通过与二级驱动齿条啮合与y轴滑板b两侧连接,进而带动y轴滑板b移动,所述y轴滑板的两侧设有凸轮随动器导向y轴滑板和y轴,所述y轴滑板的下方连接有直线导轨,用于导向y轴。
8.所述y轴电机与y轴导向机构相连接,所述y轴电机通过减速机连接齿轮齿条实现驱动;机械手通过夹爪气缸与y轴相连接。
9.所述z轴导向机构包括直线导轨,通过直线导轨实现导向,所述z轴电机通过减速机连接齿轮齿条实现驱动,机械手通过z轴导向机构与z轴相连接。
10.进一步的,所述x轴电机、y轴电机、z轴电机均为伺服电机。
11.本实用新型与现有技术相比具有的有益效果是:
12.本实用新型提供的机械手是替代原有人工上下料,实现自动上下料,缩短y轴横向长度,节省节拍,降低人力成本的同时保证生产的效率和产量。
附图说明
13.下面结合附图和实施例对本实用新型进一步说明:
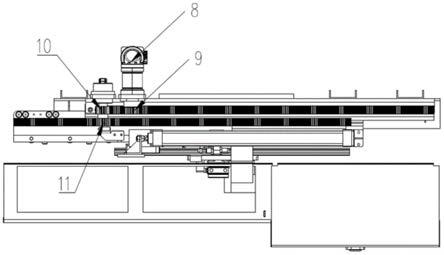
14.图1是本实用新型切片机自动上下料单桁架机械手侧视图。
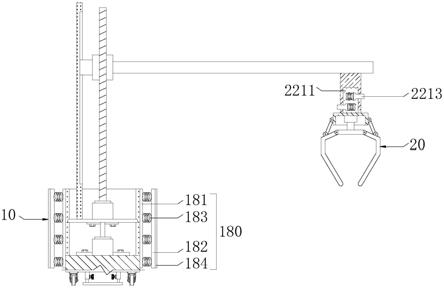
15.图2是本实用新型切片机自动上下料单桁架机械手仰视图。
16.图3是本实用新型切片机自动上下料单桁架机械手去除桁架后的主视图。
17.图中1.x轴电机,2.z轴,3.y轴,4.x轴,5.z轴电机,6.夹爪气缸,7.驱动气缸,8.y轴电机,9.一级驱动齿轮,10.被动齿轮,11.二级驱动齿轮。
具体实施方式
18.以下结合说明书附图,对本实用新型进一步说明,但本实用新型并不局限于以下实施例。
19.实施例1
20.一种切片机自动上下料单桁架机械手,如图1
‑
3所示,包括桁架、x轴4、z轴2、y轴3、机械手;所述x轴4、z轴2、y轴3设置在桁架上,所述x轴4上设有x轴导向机构,所述z轴2上设有z轴导向机构,所述y轴3上设有y轴导向机构,所述x轴4与机械手通过x轴导向机构相连接;所述y轴3上还设有y轴滑板,所述y轴滑板两侧与y轴导向机构连接,所述y轴滑板上还设有夹爪气缸6,所述x轴4、z轴2、y轴3上分别对应设有x轴电机1、z轴电机5、y轴电机8;
21.所述x轴导向机构包括导向型材、钢轴、圆弧轴;所述圆弧轴上下两面分别连接有导向型材,且导向型材与圆弧轴连接的一侧设有半圆孔,所述圆弧轴一侧的上下两面分别嵌设钢轴,所述钢轴与导向型材通过导向型材的半圆孔活动连接;且钢轴贯穿导向型材。
22.所述x轴电机1与x轴导向机构连接,所述x轴电机1通过减速机连接齿轮齿条实现驱动。
23.所述y轴导向机构包括驱动气缸7、直线导轨、凸轮随动器、一级驱动齿轮9、被动齿轮10、二级驱动齿轮11;所述y轴滑板包括上下设置的y轴滑板a和y轴滑板b;所述驱动气缸7与一级驱动齿轮9相连接,一级驱动齿轮9通过与一级驱动齿条啮合与y轴滑板a两侧连接,进而带动y轴滑板a移动,所述一级驱动齿条的另一端与被动齿轮10连接,所述被动齿轮10下端设有二级驱动齿轮11,所述被动齿轮10与二级驱动齿轮11同轴设置,所述二级驱动齿轮11通过与二级驱动齿条啮合与y轴滑板b两侧连接,进而带动y轴滑板b移动,所述y轴滑板的两侧设有凸轮随动器导向y轴滑板和y轴3,所述y轴滑板的下方连接有直线导轨,用于导向y轴3。
24.所述y轴电机8与y轴导向机构相连接,所述y轴电机8通过减速机连接齿轮齿条实现驱动;机械手通过夹爪气缸6与y轴3相连接。
25.所述z轴导向机构包括直线导轨,通过直线导轨实现导向,所述z轴电机5通过减速机连接齿轮齿条实现驱动,机械手通过z轴导向机构与z轴2相连接。
26.x轴4上采用铝型材、钢轴、圆弧轴承组成形式,这样的组合形式既可以省去加工时
间和加工成本,又能满足使用需求。
27.y轴3采用直线导轨导向和凸轮随动器为导向,y轴3伺服电机驱动齿轮齿条结构,实现y轴3的左右二级变位;驱动气缸7气缸变位的同时带动夹爪气缸6,实现夹爪气缸6和晶棒的定位。
28.本实用新型提供的切片机自动上下料单桁架机械手,同时给单侧10台切片机上下料。在x轴4上装有一个机械手,一个机械手负责上料下料。每个手都能实现x轴4、y轴3、z轴2三个方向的变位,从而实现为切片机自动上下料。
29.动作顺序
30.1.机械手,给机床上料动作:
31.1)z轴电机5动作,机械手下降到位。
32.2)y轴3驱动气缸7驱动夹爪气缸6运动到位,一级驱动齿轮9驱动一级驱动齿条及y轴滑板a,一级驱动齿条带动被动齿轮10,被动齿轮10带动二级驱动齿轮11,二级驱动齿轮11驱动y轴滑板b和y轴3运动到取料位,夹爪气缸6闭合到位,y轴3驱动气缸8驱动夹爪气缸6运动到原位,二级驱动齿轮11、一级驱动齿轮9驱动y轴滑板b和y轴3运动到原位,一级驱动齿轮9驱动y轴滑板a运动到原位,完成取料。
33.3)z轴电机5动作,机械手上升到位。
34.4)x轴电机1动作,机械手x轴4变位到切片机上料位。
35.5)z轴电机5动作,机械手下降到位。
36.6)y轴电机8动作,机械手y轴3变位到位。
37.7)y轴3驱动气缸7驱动夹爪气缸6运动到位,一级驱动齿轮9驱动一级驱动齿条及y轴滑板a,一级驱动齿条带动被动齿轮10,被动齿轮10带动二级驱动齿轮11,二级驱动齿轮11驱动y轴滑板b和y轴3运动到取料位,夹爪气缸6打开到位,y轴3驱动气缸7驱动夹爪气缸6运动到原位,二级驱动齿轮11、一级驱动齿轮9驱动y轴滑板b和y轴3运动到原位,一级驱动齿轮9驱动y轴滑板a运动到原位,完成上料。
38.8)z轴电机5动作,机械手上升到位。
39.9)x轴电机1动作,机械手x轴4变位到原位。
40.2.机械手,给机床下料动作:
41.1.x轴电机,2.z轴,3.y轴,4.x轴,5.z轴电机,6.夹爪气缸,7.驱动气缸,8.y轴驱动电机,9.一级驱动齿轮,10.被动齿轮,11.二级驱动齿轮。
42.1)x轴电机1动作,机械手x轴4变为到位,移动至机床下料位。
43.2)z轴电机5动作,机械手下降到位。
44.3)y轴3驱动气缸7驱动夹爪气缸6运动到位,一级驱动齿轮9驱动一级驱动齿条及y轴滑板a,一级驱动齿条带动被动齿轮10,被动齿轮10带动二级驱动齿轮11,二级驱动齿轮11驱动y轴滑板b和y轴3运动到取料位,夹爪气缸6闭合到位,y轴3驱动气缸7驱动夹爪气缸6运动到原位,二级驱动齿轮11、一级驱动齿轮9驱动y轴滑板b和y轴3运动到原位,一级驱动齿轮9驱动y轴滑板a运动到原位,完成取料。
45.4)z轴电机5动作,机械手上升到位。
46.5)x轴电机1动作,机械手x轴3变位到下料位。
47.6)z轴电机5动作,机械手下降到位。
48.7)y轴3驱动气缸7驱动夹爪气缸6运动到位,一级驱动齿轮9驱动一级驱动齿条及y轴滑板a,一级驱动齿条带动被动齿轮10,被动齿轮10带动二级驱动齿轮11,二级驱动齿轮11驱动y轴滑板b和y轴3运动到取料位,夹爪气缸6打开到位,y轴3驱动气缸7驱动夹爪气缸6运动到原位,二级驱动齿轮11、一级驱动齿轮9驱动y轴滑板b和y轴3运动到原位,一级驱动齿轮9驱动y轴滑板a运动到原位,完成下料。
49.本实用新型提供的机械手在晶棒生产过程中得到应用,操作简单、快捷、轻便,实现了产品的自动上下料,保障了生产过程安全可靠,提高了作业效率。
50.虽然,上文中已经用一般性说明及具体实施例对本实用新型作了详尽的描述,但在本实用新型基础上,可以对之作一些修改或改进,这对本领域技术人员而言是显而易见的。因此,在不偏离本实用新型精神的基础上所做的这些修改或改进,均属于本实用新型要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。