1.本实用新型属于六轴机器人技术领域,尤其涉及一种六轴机器人移动台。
背景技术:
2.六轴机器人拥有六个旋转轴,类似于人类的手臂,应用于装货、卸货、喷漆、表面处理、测试、测量、弧焊、点焊、包装、装配、切屑机床、固定、特种装配操作、锻造、铸造等领域,六轴机器人在使用时需要将其安装在工作台上。
3.但是现有的六轴机器人移动台还存在着不便于移动和停止,不便于调节六轴机器人的位置和不便于固定的问题。
4.因此,发明一种六轴机器人移动台显得非常必要。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种六轴机器人移动台,以解决现有的六轴机器人移动台存在着不便于移动和停止,不便于调节六轴机器人的位置和不便于固定的问题。一种六轴机器人移动台,包括移动台,下凹槽,上凹槽,支撑腿,减震垫,固定螺纹孔,固定块,安装螺纹孔,调节螺纹孔,移动轮,六轴机器人,位置调节固定板结构和可调节移动座结构,多个所述的下凹槽开设在移动台的下部四角部位;两个所述的上凹槽分别从前向后开设在移动台的上部左右两侧;多个纵向设置的所述的支撑腿分别上端螺栓连接在移动台的下部四周部位,并且多个纵向设置的所述的支撑腿的下端均螺钉连接有减震垫;多个所述的固定螺纹孔从前向后依次开设在移动台的上部左右两侧;多个所述的固定块分别螺栓连接在移动台的四角部位,并且多个所述的固定块的内部均纵向开设有安装螺纹孔;所述的调节螺纹孔开设在移动台的上部四角部位;所述的移动轮连接位置调节固定板结构;所述的六轴机器人连接可调节移动座结构;所述的位置调节固定板结构包括固定板,紧固螺栓,弹簧,调节板和螺杆,所述的固定板的左右两侧开设的螺纹通孔内部螺纹连接有紧固螺栓;两个所述的紧固螺栓下端均套接有弹簧;两个所述的弹簧的下端分别螺栓连接在调节板的上部左右两侧,并且两个所述的弹簧的下端分别与调节板的左右两侧开设的螺纹通孔正对设置;所述的螺杆贯穿固定板的中间部位,并且螺杆的下端轴承连接在调节板的上侧中部。
6.优选的,所述的可调节移动座结构包括调节螺栓,移动座,防滑层,滑块和滑轨,两个所述的调节螺栓分别螺纹连接在移动座的左右两侧开设的螺纹孔内;所述的防滑层螺钉连接在移动座的上部;两个所述的滑块分别上端螺栓连接在移动座下部左右两侧,并且两个所述的滑块分别滑动设置在两个所述的滑轨的外壁。
7.优选的,所述的螺杆设置有多个,分别螺纹连接在多个所述的调节螺纹孔的内部。
8.优选的,所述的弹簧设置有多个,分别上端螺栓连接在多个所述的下凹槽的内部上侧的左右两侧。
9.优选的,所述的固定板设置有多个,分别设置在多个所述的下凹槽的上侧,并且固
定板与移动台接触设置。
10.优选的,所述的调节板设置有多个,并且调节板的下部均螺栓连接有移动轮。
11.优选的,所述的滑轨设置有两个,分别下端螺栓连接在两个所述的上凹槽的内部下侧。
12.优选的,所述的调节螺栓设置有两个,分别下端螺纹连接在左右两侧设置的任意一个所述的固定螺纹孔的内部。
13.与现有技术相比,本实用新型的有益效果为:
14.1.本实用新型中,所述的固定板,紧固螺栓,弹簧,调节板,螺杆和移动轮的设置,有利于移动和停止移动台,并将移动轮移动至下凹槽内。
15.2.本实用新型中,所述的调节螺栓,移动座,防滑层,滑块和滑轨的设置,有利于安装六轴机器人,并且调节六轴机器人的位置。
16.3.本实用新型中,所述的固定块和安装螺纹孔的设置,有利于固定移动台。
17.4.本实用新型中,所述的支撑腿和减震垫的设置,有利于支撑移动台。
18.5.本实用新型中,所述的固定螺纹孔的设置,有利于固定调节螺栓。
19.6.本实用新型中,所述的上凹槽的设置,有利于安装滑轨。
附图说明
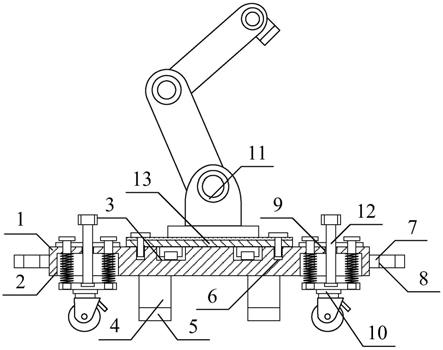
20.图1是本实用新型的结构示意图。
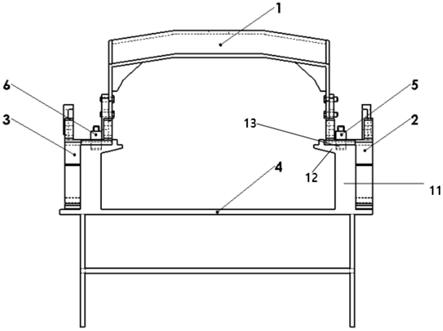
21.图2是本实用新型的位置调节固定板结构的结构示意图。
22.图3是本实用新型的可调节移动座结构的结构示意图。
23.图中:
24.1、移动台;2、下凹槽;3、上凹槽;4、支撑腿;5、减震垫;6、固定螺纹孔;7、固定块;8、安装螺纹孔;9、调节螺纹孔;10、移动轮;11、六轴机器人;12、位置调节固定板结构;121、固定板;122、紧固螺栓;123、弹簧;124、调节板;125、螺杆;13、可调节移动座结构;131、调节螺栓;132、移动座;133、防滑层;134、滑块;135、滑轨。
具体实施方式
25.下面结合附图对本实用新型进行具体描述,如附图1和附图2所示,一种六轴机器人移动台,包括移动台1,下凹槽2,上凹槽3,支撑腿4,减震垫5,固定螺纹孔6,固定块7,安装螺纹孔8,调节螺纹孔9,移动轮10,六轴机器人11,位置调节固定板结构12和可调节移动座结构13,多个所述的下凹槽2开设在移动台1的下部四角部位;两个所述的上凹槽3分别从前向后开设在移动台1的上部左右两侧;多个纵向设置的所述的支撑腿4分别上端螺栓连接在移动台1的下部四周部位,并且多个纵向设置的所述的支撑腿4的下端均螺钉连接有减震垫5;多个所述的固定螺纹孔6从前向后依次开设在移动台1的上部左右两侧;多个所述的固定块7分别螺栓连接在移动台1的四角部位,并且多个所述的固定块7的内部均纵向开设有安装螺纹孔8;所述的调节螺纹孔9开设在移动台1的上部四角部位;所述的移动轮10连接位置调节固定板结构12;所述的六轴机器人11连接可调节移动座结构13;所述的位置调节固定板结构12包括固定板121,紧固螺栓122,弹簧123,调节板124和螺杆125,所述的固定板121的左右两侧开设的螺纹通孔内部螺纹连接有紧固螺栓122;两个所述的紧固螺栓122下端均
套接有弹簧123;两个所述的弹簧123的下端分别螺栓连接在调节板124的上部左右两侧,并且两个所述的弹簧123的下端分别与调节板124的左右两侧开设的螺纹通孔正对设置;所述的螺杆125贯穿固定板121的中间部位,并且螺杆125的下端轴承连接在调节板124的上侧中部;操作人员将移动台1移动到需要安装固定的位置后,转动螺杆125,使得螺杆125在调节螺纹孔9内转动并向上移动,螺杆125带动调节板124和移动轮10向上移动,调节板124向上移动时,将弹簧123向上压缩,从而使得弹簧123和调节板124进入下凹槽2内部,通过转动紧固螺栓122,紧固螺栓122与调节板124左右两侧开设的螺纹通孔连接,并将调节板124进行固定,从而将移动轮10收入下凹槽2内。
26.本实施方案中,结合附图3所示,所述的可调节移动座结构13包括调节螺栓131,移动座132,防滑层133,滑块134和滑轨135,两个所述的调节螺栓131分别螺纹连接在移动座132的左右两侧开设的螺纹孔内;所述的防滑层133螺钉连接在移动座132的上部;两个所述的滑块134分别上端螺栓连接在移动座132下部左右两侧,并且两个所述的滑块134分别滑动设置在两个所述的滑轨135的外壁;操作人员通过转动调节螺栓131,将移动座132通过滑块134沿滑轨135前后移动,从而调节六轴机器人11的位置,调整完毕后转动调节螺栓131,使得调节螺栓131与固定螺纹孔6连接。
27.本实施方案中,具体的,所述的螺杆125设置有多个,分别螺纹连接在多个所述的调节螺纹孔9的内部。
28.本实施方案中,具体的,所述的弹簧123设置有多个,分别上端螺栓连接在多个所述的下凹槽2的内部上侧的左右两侧。
29.本实施方案中,具体的,所述的固定板121设置有多个,分别设置在多个所述的下凹槽2的上侧,并且固定板121与移动台1接触设置。
30.本实施方案中,具体的,所述的调节板124设置有多个,并且调节板124的下部均螺栓连接有移动轮10。
31.本实施方案中,具体的,所述的滑轨135设置有两个,分别下端螺栓连接在两个所述的上凹槽3的内部下侧。
32.本实施方案中,具体的,所述的调节螺栓131设置有两个,分别下端螺纹连接在左右两侧设置的任意一个所述的固定螺纹孔6的内部。
33.本实施方案中,具体的,所述的移动座132的下部与移动台1的上部接触设置。
34.本实施方案中,具体的,所述的调节螺纹孔9设置在下凹槽2的上侧中部,并且调节螺纹孔9与下凹槽2连通设置。
35.本实施方案中,具体的,所述的固定螺纹孔6设置在上凹槽3的外侧。
36.本实施方案中,具体的,所述的支撑腿4设置在下凹槽2的内侧。
37.本实施方案中,具体的,所述的六轴机器人11设置在防滑层133的上侧中部,并且六轴机器人11的下端与移动座132螺栓连接设置。
38.本实施方案中,具体的,所述的移动座132采用下部喷涂有聚四氟乙烯层的长方形铝合金座;所述的防滑层133采用橡胶层。
39.本实施方案中,具体的,所述的固定板121采用长方形铝合金板;所述的调节板124采用左右两侧开设有螺纹通孔的铝合金板;所述的螺杆125采用上端螺钉连接有五角胶头螺帽的不锈钢螺杆。
40.本实施方案中,具体的,所述的减震垫5采用橡胶垫;所述的固定块7采用长方形不锈钢块;所述的移动轮10采用万向轮。
41.工作原理
42.本实用新型中,操作人员将移动台1移动到需要安装固定的位置后,转动螺杆125,使得螺杆125在调节螺纹孔9内转动并向上移动,螺杆125带动调节板124和移动轮10向上移动,调节板124向上移动时,将弹簧123向上压缩,从而使得弹簧123和调节板124进入下凹槽2内部,通过转动紧固螺栓122,紧固螺栓122与调节板124左右两侧开设的螺纹通孔连接,并将调节板124进行固定,从而将移动轮10收入下凹槽2内,直到减震垫5接触地面,将移动台1由移动状态变为停止状态;移动台1固定好后,操作人员通过转动调节螺栓131,将移动座132通过滑块134沿滑轨135前后移动,从而调节六轴机器人11的位置,调整完毕后转动调节螺栓131,使得调节螺栓131与固定螺纹孔6连接。
43.利用本实用新型所述的技术方案,或本领域的技术人员在本实用新型技术方案的启发下,设计出类似的技术方案,而达到上述技术效果的,均是落入本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。