1.本发明涉及车辆技术领域,特别涉及一种车辆的动力驱动控制器及车辆。
背景技术:
2.随着车辆电动化、智能化、网联化、共享化的发展,越来越多的ecu(electronic control unit,电子控制单元)集成到新能源车辆的eea(electrical/electronic architecture,电子电气架构)中,在eea中肯定离不开e/e系统。传统的eea将所有的区域功能都有一个控制器,每增加一个功能都增加一个ecu来控制,从而导致整车通讯网络的节点越来越多,总线负载率增加,不仅增加了成本,而且增加了信息安全的风险。
3.相关技术中,动力域控制器对各个控制器单元进行不同内容的多功能集成。
4.然而,因为采用多控制器的方式,所以每一个控制器都将进行一些信息安全、功能安全、部分硬件冗余设计,从而使硬件资源浪费,造成整体成本较高且增加网络物理节点的存在增加了信息安全的风险,亟待解决。
技术实现要素:
5.有鉴于此,本发明旨在提出一种车辆的动力驱动控制器,该车辆的动力驱动控制器解决了相关技术中存在的因采用多控制器的方式,导致硬件资源浪费,成本较高,且存在信息安全的问题,降低了车辆的驱动控制器的成本,实现了高聚合低耦合,并且可以提升车辆的舒适性。
6.为达到上述目的,本发明的技术方案是这样实现的:
7.一种车辆的动力驱动控制器,包括:
8.通讯模块,用于接收整合控制器的控制指令;
9.处理器,所述处理器集成设置有电机控制单元和同步脱开控制单元,其中,所述电机控制单元根据所述控制指令中的驱动信号驱动所述车辆的驱动电机输出对应扭矩,和/或所述同步脱开控制单元根据所述控制指令中的换挡信号驱动所述车辆的换挡电机执行车辆换挡动作。
10.进一步地,所述处理器为系统级芯片,其中,所述电机控制单元和所述同步脱开控制单元设置于所述系统级芯片上。
11.进一步地,还包括:
12.电源模块,用于为所述通讯模块和所述系统级芯片供电。
13.进一步地,所述电机控制单元的第一驱动电路和所述同步脱开控制单元的第二驱动电路隔离设置,且所述第一驱动电路和所述第二驱动电路均与所述电源模块的供电电路相连。
14.进一步地,还包括:
15.监控模块,用于监控所述处理器的实际性能;
16.限制模块,用于在所述实际性能大于预设阈值时,控制所述处理器执行性能限制
动作。
17.进一步地,还包括:
18.信号处理模块,用于对所述通讯模块接受的输入信号进行处理,并将处理后的信号发送至所述处理器;
19.信号监控模块,用于监控所述输入信号,判断所述输入信号是否异常。
20.进一步地,还包括:
21.故障监控模块,用于监控所述处理器是否故障;
22.故障诊断模块,用于在所述处理器故障时,诊断所述处理器的故障原因;
23.故障处理模块,用于根据所述故障原因控制所述处理器执行故障处理动作。
24.进一步地,还包括:
25.安全模块,用于采用预设安全机制对所述处理器执行安全动作。
26.相对于现有技术,本发明所述的车辆的动力驱动控制器具有以下优势:
27.本发明所述的车辆的动力驱动控制器,可以通过将电机控制单元和同步脱开控制单元深度集成,通过同一个soc的控制,使得软件同步时间更好的匹配,执行器之间平顺的运行、切换,解决了相关技术中存在的因采用多控制器的方式,导致硬件资源浪费,成本较高,且存在信息安全的问题,降低了车辆的驱动控制器的成本,实现了高聚合低耦合,并且可以提升车辆的舒适性。
28.本发明的另一个目的在于提出一种车辆,该车辆解决了相关技术中存在的因采用多控制器的方式,导致硬件资源浪费,成本较高,且存在信息安全的问题,降低了车辆的驱动控制器的成本,实现了高聚合低耦合,并且可以提升车辆的舒适性。
29.为达到上述目的,本发明的技术方案是这样实现的:
30.一种车辆,设置有如上述实施例所述的车辆的动力驱动控制器。
31.所述的车辆与上述的车辆的动力驱动控制器相对于现有技术所具有的优势相同,在此不再赘述。
附图说明
32.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
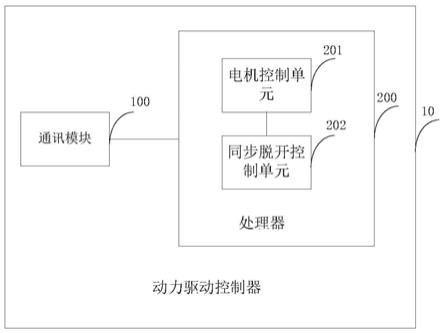
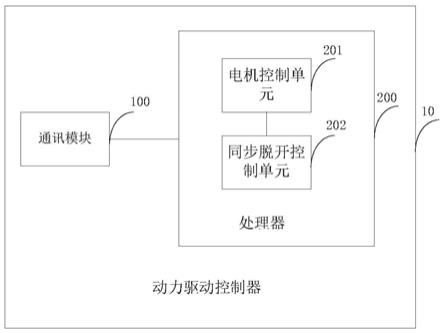
33.图1为本发明实施例所述的车辆的动力驱动控制器的方框示意图;
34.图2为本发明一个实施例所述的车辆的动力驱动控制器硬件的结构示意图;
35.图3为本发明一个实施例所述的车辆的动力驱动控制器的模块组成示意图;
36.图4为本发明一个实施例所述的车辆的动力驱动控制器的控制流程图;
37.图5为本发明一个实施例所述的车辆的动力驱动控制器的时序控制示意图。
具体实施方式
38.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
39.下面将参考附图并结合实施例来详细说明本发明。
40.图1是根据本发明实施例的车辆的动力驱动控制器的方框示意图。
41.在介绍本发明实施例的车辆的动力驱动控制器之前,先简单介绍下相关技术中的动力域控制器。
42.具体地,相关技术中的车载控制单元主要有分布式简单的累加功能和域控制器硬件的物理集成。
43.其中,对于分布式控制单元来说,车载控制单元中分为车辆控制单元(vehicle control unit,vcu)、电池管理系统(battery management system,bms)、电机控制单元(motor control unit,mcu)、同步脱开控制单元(e
‑
shift)、转向控制单元(electric power steering,eps)等,每一个控制单元作为单独的网络节点通过通讯网络与其他控制单元进行交互;
44.对于域控制单元来说,其是通过把汽车中分为若干个控制域;通过域控的方式,由域控制器作为逻辑中继点。将命令传输到各个ecu上在进行控制;
45.然而,分布式单元和域控制单元两种架构,因为采用多控制器的方式,所以每一个控制器都将进行一些信息安全、功能安全、部分硬件冗余设计,从而使硬件资源浪费,造成整体成本较高且增加网络物理节点的存在增加了信息安全的风险。
46.本发明正是基于上述问题,而提出一种车辆的动力驱动控制器,可以通过将电机控制单元和同步脱开控制单元深度集成,通过同一个处理器的控制,使得软件同步时间更好的匹配,执行器之间平顺的运行、切换,解决了相关技术中存在的因采用多控制器的方式,导致硬件资源浪费,成本较高,且存在信息安全的问题,降低了车辆的驱动控制器的成本,实现了高聚合低耦合,并且可以提升车辆的舒适性。
47.如图1所示,根据本发明实施例的车辆的动力驱动控制器10包括:通讯模块100和处理器200。
48.其中,通讯模块100用于接收整合控制器的控制指令。处理器200集成设置有电机控制单元201和同步脱开控制单元202,其中,电机控制单元201根据控制指令中的驱动信号驱动车辆的驱动电机输出对应扭矩,和/或同步脱开控制单元202根据控制指令中的换挡信号驱动车辆的换挡电机执行车辆换挡动作。
49.其中,在一些实施例中,处理器200可以为系统级芯片(system on chip,soc,),其中,电机控制单元201和同步脱开控制单元202设置于系统级芯片上。
50.其中,通讯模块100可以为can(controller area network,控制器局域网络)通讯模块,为保证通讯的质量,本发明实施例可以选择带宽更大的can_fd或者can_xl通讯协议。
51.具体而言,本发明实施例的动力驱动控制器10可以将电机控制单元201和同步脱开控制单元202深度集成在处理器200上,处理器200可以为soc,以通过soc来控制执行器的运行,从而大大减少一些重复性的软件以及硬件的设计内容,降低了软硬件设计复杂度,实现设计的高聚集和低耦合。
52.进一步地,结合图2所示,图2为本发明一个实施例的动力驱动控制器10的硬件拓扑示意图。
53.进一步地,在一些实施例中,上述的车辆的动力驱动控制器10,还包括:电源模块300。其中,电源模块300用于为通讯模块100和系统级芯片供电。
54.具体地,动力驱动控制器10可以采用电源模块300进行统一电压供电,供电电路可以分为高压供电电路和低压供电电路,本发明实施例可以通过sbc(system basis chip,电
源管理芯片),为各个电路提供对应的低压电力的供应,高压部分通过xy电容以及igbt构成高压电路,系统级芯片与门级电路单元驱动高压电路。
55.进一步地,在一些实施例中,如图2所示,电机控制单元201的第一驱动电路和同步脱开控制单元202的第二驱动电路隔离设置,且第一驱动电路和第二驱动电路均与电源模块的供电电路相连。
56.具体地,系统级芯片对无刷电机控制的门级驱动电路和mos组成的驱动电路进行控制,第一驱动电路和第二驱动电路在驱动板电路设计中采用物理隔离,可以更好的提高emc(electro magnetic compatibility,电磁兼容)的等级。
57.为便于理解,下面结合图3进行详细说明本发明实施例的动力驱动控制器10的其他组成模块。其中,本发明实施例的车辆的动力驱动控制器10还可以包括:监控模块、限制模块、信号处理模块、信号监控模块、故障监控模块、故障诊断模块、故障处理模块和安全模块等。
58.进一步地,在一些实施例中,如图3所示,上述的车辆的动力驱动控制器10,还包括:监控模块,用于监控处理器200的实际性能;限制模块,用于在实际性能大于预设阈值时,控制处理器200执行性能限制动作。
59.其中,预设阈值可以是用户预先设定的阈值,可以是通过有限次实验获取的阈值,也可以是通过有限次计算机仿真得到的阈值,在此不做具体限定。
60.应当理解的是,本发明实施例的动力驱动控制器10可以通过监控模块实时监控处理器200的实际性能,从而根据需求通过限制模块控制处理器200执行性能限制动作。
61.进一步地,在一些实施例中,如图3所示,上述的车辆的动力驱动控制器10,还包括:信号处理模块,用于对通讯模块100接受的输入信号进行处理,并将处理后的信号发送至处理器200;信号监控模块,用于监控输入信号,判断输入信号是否异常。
62.具体而言,信号处理模块可以对通讯模块100接受的输入信号进行相应处理后发送至处理器200,以便处理器200根据处理后的信号执行相应的控制。然而,输入信号如果异常,如果按照异常的信号进行处理,存在一定的安全隐患,因此,本发明实施例还可以通过信号监控模块监控输入信号,判断输入信号是否异常,通过与预设的信号进行比对,如果输入信号与预设的信号不一致,则判定输入信号存在异常。
63.进一步地,在一些实施例中,如图3所示,上述的车辆的动力驱动控制器10,还包括:故障监控模块,用于监控处理器200是否故障;故障诊断模块,用于在处理器200故障时,诊断处理器200的故障原因;故障处理模块,用于根据故障原因控制处理器200执行故障处理动作。
64.应当理解的是,为保证安全性,本发明实施例可以设置有故障监控模块,通过故障监控模块实时监控处理器200的故障,如果监控到处理器200出现故障,可以通过故障诊断模块对处理器200的故障进行诊断,从而根据预设的故障列表,确定处理器200的故障原因,并根据故障原因控制处理器200执行故障处理动作。需要说明的是,如果预设的故障列表中不存在与该故障对应的故障原因,则将该故障添加至预设的故障列表,并提醒维修人员进行相关的故障处理。
65.进一步地,在一些实施例中,如图3所示,上述的车辆的动力驱动控制器10,还包括:安全模块,用于采用预设安全机制对处理器200执行安全动作。
66.其中,预设安全机制可以通过预先训练得到。
67.具体而言,为进一步提高车辆的动力驱动控制器10的安全性,本发明实施例还设置有安全模块,从而通过安全模块采用预设安全机制对处理器200执行安全动作。
68.由此,本发明实施例采用了硬件电路深度集成电机控制单元201和同步脱开控制单元202,形成高度集成的控制器,通过高度集成的电路可以有效减少分布式的电路所造成的数据交互的校验和认证的过程,在硬件电路设计中通过将信号线置于多层板的中间部分,可以有效的增加信息安全的等级;并且对于控制软件的诊断和刷写等软件架构中也会减少一些重复性的工作内容,如整体工程中将减少交互中的故障校验以及各个控制器fastbootload(fbl)的相关工作内容,同时减少了每个控制器的非功能性需求。
69.为使得本领域技术人员进一步了解本发明实施例的车辆的动力驱动控制器,下面结合具体实施例进行详细阐述。
70.如图4所示,该车辆的动力驱动控制器的控制方法,包括以下步骤:
71.s401,开始。
72.s402,初始化。
73.s403,判断是否完成初始化,如果是,执行步骤s404,否则,执行步骤s402。
74.s404,判断是否满足工作条件,如果是,执行步骤s405。
75.s405,接收vcu发送的电机指令和档位指令。
76.在执行步骤s406的同时,执行步骤s407和s409。
77.s406,判断是否poweroff(电源关闭),如果是,执行步骤s416。
78.s407,根据当前控制模式进入的模式,其中,控制模式包括转速模式、扭矩模式和电流模式。
79.s408,反馈转速、扭矩,并跳转执行步骤s405。
80.s409,读取挡位状态。
81.s410,接收挡位信息。
82.s411,判断挡位信息是否改变,如果是,执行步骤s412,否则执行步骤s410。
83.s412,驱动bldc(brushless direct current motor,无刷直流电机)电机,带动执行器拨叉。
84.s413,判断是否存在挡位到位反馈,如果是,执行步骤s414,否则,执行步骤s412。
85.s414,反馈当前挡位。
86.s415,判断是否poweroff,如果是,执行步骤s416,否则,执行步骤s410。
87.s416,shutdown(停止运转)。
88.s417,结束。
89.进一步地,结合图5所示,图5车辆的动力驱动控制器的工作序列图,车辆的动力驱动控制器完成初始化后,整车控制器将电机指令和档位指令发送至动力驱动控制器,动力控制器将根据电机指令得到电机控制信息和档位需求信息,并将电机控制信息发送至电机,将档位需求信息发送至blcd电机,以执行相应的动作,本发明实施例可以将执行动作后的档位信息和输出轴转速反馈至车辆的动力驱动控制器,车辆的动力驱动控制器将档位反馈至整车控制器。车辆的动力驱动控制器还可以接收整车控制器发出的换挡信息,动力驱动控制器驱动档位执行器(同步器装置,即驱动bldc电机推动换挡结构拨叉将同步齿与输
出轴结合),同时在接收整车档位指令时,控制驱动电机控制模式由扭矩模式切换为速度模式进行对输出端速度适配,实现电机与输出轴的速度同步;档位执行器的传感器检测到档位位置信号后,同时驱动电机由转速模式切换为扭矩模式,从而继续提供系统的动力输出。
90.根据本发明实施例提出的车辆的动力驱动控制器,可以通过将电机控制单元和同步脱开控制单元深度集成,通过同一个处理器控制,使得软件同步时间更好的匹配,执行器之间平顺的运行、切换,解决了相关技术中存在的因采用多控制器的方式,导致硬件资源浪费,成本较高,且存在信息安全的问题,降低了车辆的驱动控制器的成本,实现了高聚合低耦合,并且可以提升车辆的舒适性。
91.进一步地,本发明的实施例公开了一种车辆,该车辆设置有上述实施例所述的车辆的动力驱动控制器。该车辆由于具有了上述车辆的动力驱动控制器,解决了相关技术中存在的因采用多控制器的方式,导致硬件资源浪费,成本较高,且存在信息安全的问题,降低了车辆的驱动控制器的成本,实现了高聚合低耦合,并且可以提升车辆的舒适性。
92.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。