1.本发明涉及卫星总体设计领域,具体地,涉及一种非太阳同步轨道通信卫星单轴太阳翼驱动方法,尤其是一种面向扁平堆叠发射的非太阳同步轨道通信卫星单轴太阳翼驱动方法。
背景技术:
2.通信类卫星与其它卫星相比具有长寿命、大功耗、全周期长时工作的特点,需要能源系统在寿命期内不间断地提供稳定、充足的能源保障。传统通信卫星均为地球同步轨道卫星,与低地球轨道光照条件不同,太阳电池阵设计和驱动方法也不相同。
3.随着低轨通信卫星星座的兴起,对低成本、高效率、高可靠的低轨通信卫星设计提出了更高的要求。低地球轨道可分为太阳同步轨道和非太阳同步轨道,太阳同步轨道光照角变化较小,太阳电池阵采用传统一维转动即可实现;非太阳同步轨道光照角变化大,太阳电池阵在转动的同时需要进行摆动,若按传统方法进行设计,则摆动角度过大,而通信卫星通信载荷视场通常较大,因此会对通信载荷的视场照成遮挡,影响卫星的正常业务运行。
4.在卫星总体设计领域,根据已检索的专利,该领域研究人员针对卫星太阳电池阵和驱动方式设计已提出多种方法。在公告号为cn102004492b的中国专利文献中,介绍了一种非太阳同步轨道卫星双轴帆板控制方法,该文献仅根据非太阳同步轨道光照角设计卫星太阳翼的具体驱动控制方法,并未从卫星总体设计的角度考虑太阳翼摆动后对载荷视场的遮挡问题。本专利深度挖掘了非太阳同步轨道光照角与阴影时间的关系,针对太阳翼摆动对日后对载荷视场的影响提出了对太阳翼面积影响最小的摆动策略设计方法,与该专利有较为明显不同。
5.在公告号为cn106697334b的中国专利文献中,公开了一种卫星太阳翼帆板驱动控制方法,该文献主要针对驱动机构的硬件设计,与本专利有较为明显不同。
6.在公告号为cn105035364b的中国专利文献中,公开了一种低倾角轨道雷达卫星的太阳阵驱动摆动方法,该文献通过卫星不同的偏航飞行状态,设计太阳翼不同的布局方法和是否驱动,由于雷达卫星并非要求整个轨道周期内对地定向,因此可以实现太阳光入射角在预期的范围内,且无需两维驱动,由于载荷特性未考虑太阳翼对载荷视场的遮挡问题,与本专利有较为明显不同。
7.在公开号为cn112758354a的中国专利文献中,公开了一种低轨卫星双轴太阳翼控制与能源平衡耦合计算方法,该文献并未结合轨道光照角和阴影周期的相互特点进行太阳翼驱动方法的优化,与本专利提出的驱动方法有较为明显的不同。
8.在公开号为cn112937923a的中国专利文献中,公开了一种近地倾斜轨道卫星双轴太阳翼驱动机构控制方法,该文献在太阳翼驱动机构控制方法设计时并未考虑对通信载荷视场的影响,且并未结合轨道光照角和阴影周期的相互特点进行太阳翼驱动方法的优化,与本专利提出的驱动方法有较为明显的不同。
9.在公开号为cn112937919a的中国专利文献中,公开了一种低轨道卫星双自由度太
阳翼控制方法,该文献是如何控制双自由度太阳翼如何运动,未从卫星总体角度设计太阳翼的驱动方法,与本专利有较为明显不同。
10.在公开号为cn111792058a的中国专利文献中,公开了一种低倾角轨道单轴sada驱动太阳翼对日的方法,包括以下步骤:s1、星上传感器确定太阳矢量在轨道系中的坐标;s2、根据太阳矢量在轨道xooyo平面的投影,计算卫星偏航角;s3、计算卫星姿态运动中期望的偏航角及角速度信息;s4、根据太阳翼驱动装置零位时太阳帆板法线坐标与太阳矢量夹角计算太阳翼驱动装置转角;s5、星上执行机构控制卫星机动,同时太阳翼驱动装置配合转动,以保证太阳翼指向太阳。
技术实现要素:
11.针对现有技术中的缺陷,本发明的目的是提供一种非太阳同步轨道通信卫星单轴太阳翼驱动方法及系统。
12.根据本发明提供的一种非太阳同步轨道通信卫星单轴太阳翼驱动方法,包括以下步骤:
13.步骤s1:基于轨道参数计算一年内卫星轨道光照角的变化曲线,所述轨道光照角为太阳矢量与卫星轨道面之间的夹角β,所述轨道参数包括轨道高度和轨道倾角;
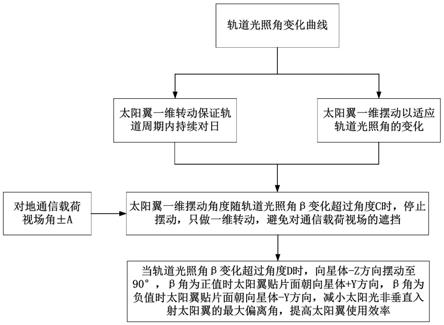
14.步骤s2:根据轨道光照角的变化趋势,太阳翼通过一维转动保证轨道周期内持续对日,太阳翼还通过一维摆动适应轨道光照角的变化;
15.步骤s3:太阳翼一维摆动角度岁轨道光照角β变化超过设定角度c时,停止摆动,太阳翼只做一维转动,避免对通信载荷现场的遮拦;
16.步骤s4:当轨道光照角β变化超过设定角度d时,向卫星本体
‑
z方向摆动至90
°
,轨道光照角β为正值时太阳翼贴片面朝向卫星本体 y方向,β角为负值时太阳翼贴片面朝向星体
‑
y方向。
17.优选的,所述步骤s3中角度c的计算方法为:c=90
°‑
a,其中a为通信载荷视场角。
18.优选的,所述步骤s4中角度d的计算方法为:d=90
°‑
a/2,其中a为通信载荷视场角。
19.优选的,基于轨道参数计算一年内轨道阴影期t的变化曲线,所述轨道参数包括轨道高度和倾角,将轨道阴影期t的变化曲线与轨道光照角的变化曲线进行拟合,获得卫星经历全光照期的太阳光照角阈值β1。
20.优选的,基于一年内轨道阴影期t的变化曲线中最大阴影时间t1计算整星功耗和太阳翼垂直照射时输出功率比值(p
sat
/(1
‑
5%))/p
solar
,得到太阳翼在全光照期无需给蓄电池组充电时允许太阳光非垂直入射的最大偏离角b,p
sat
为卫星工作状态下整星功耗。
21.优选的,所述角度b的计算方法为:b=arccos((p
sat
/(1
‑
5%))/p
solar
)。
22.优选的,为保证该驱动方法能满足单圈能源平衡需求,
23.若c大于β1,且a/2小于b,则太阳翼无需适应性增加面积;
24.若c大于β1,且a/2大于b,则太阳翼面积需适应性增加,输出功率p
add1
需增加,
25.若c小于β1,且a/2小于b,则在轨道光照角
‑
β1~
‑
c和c~β1变化区间内,轨道光照角每变1
°
,根据此时阴影时间计算所需太阳翼输出功率p1是否都小于p
solar
,若是则无需适应性增加太阳翼面积,若否则需要增加输出功率p
add2
;
26.若c小于β1,且a/2大于b,则太阳翼面积需适应性增加,输出功率需增加p
add3
,同时在轨道光照角
‑
β1~
‑
c和c~β1变化区间内,轨道光照角每变1
°
,根据此时阴影时间计算所需太阳翼输出功率p2是否都小于p
solar
p
add3
,若是则无需再适应性增加太阳翼面积,若否则输出功率需要再增加。
27.优选的,所述p1的计算如下:
[0028][0029]
式中:t
阴影
表示光照角β对应的地影时间,t
光照
轨道光照角β对应的光照时间;
[0030]
若p
solar
>p
max1
,p
max1
为p1的最大值,无需增大太阳翼面积;
[0031]
若p
solar
<p
max1
,则输出功率需增加p
add2
=p
max1
‑
p
solar
。
[0032]
9、根据权利要求7所述的非太阳同步轨道通信卫星单轴太阳翼驱动方法,其特征在于:所述p2的计算如下:
[0033][0034]
式中:t
阴影
表示光照角β对应的地影时间,t
光照
轨道光照角β对应的光照时间;
[0035]
若p
solar
p
add3
>p
max2
,p
max2
为p2的最大值,则无需增大太阳翼面积;
[0036]
若p
solar
p
add3
<p
max2
,则输出功率需再增加p
add3
=p
max2
‑
p
solar
‑
p
add3
;总功率增加为:p
add4
=p
add3
p
add3
=p
max2
‑
p
solar
。
[0037]
根据本发明提供的一种非太阳同步轨道通信卫星单轴太阳翼驱动系统,包括以下模块:
[0038]
模块m1:基于轨道参数计算一年内卫星轨道光照角的变化曲线,所述轨道光照角为太阳矢量与卫星轨道面之间的夹角β,所述轨道参数包括轨道高度和轨道倾角;
[0039]
模块m2:根据轨道光照角的变化趋势,太阳翼通过一维转动保证轨道周期内持续对日,太阳翼还通过一维摆动适应轨道光照角的变化;
[0040]
模块m3:太阳翼一维摆动角度岁轨道光照角β变化超过设定角度c时,停止摆动,太阳翼只做一维转动,避免对通信载荷现场的遮拦;
[0041]
模块m4:当轨道光照角β变化超过设定角度d时,向卫星本体
‑
z方向摆动至90
°
,轨道光照角β为正值时太阳翼贴片面朝向卫星本体 y方向,β角为负值时太阳翼贴片面朝向星体
‑
y方向。
[0042]
与现有技术相比,本发明具有如下的有益效果:
[0043]
1、本发明通过设计一种面向扁平堆叠发射的非太阳同步轨道通信卫星单轴太阳翼驱动方法,针对扁平堆叠发射卫星单轴太阳翼布局,充分利用非太阳同步轨道卫星全光照期的特点,合理设置太阳翼在轨全周期驱动策略。
[0044]
2、本发明在规避对通信载荷视场遮挡的同时,提高太阳翼使用效率,减小太阳翼面积。
[0045]
3、本发明为未来低轨大批量卫星低成本、高效率研制奠定基础。
附图说明
[0046]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
[0047]
图1为本发明实施例非太阳同步轨道通信卫星单轴太阳翼驱动方法的流程示意图;
[0048]
图2为本发明实施例中卫星在轨飞行状态示意图;
[0049]
图3为本发明实施例中轨道光照角β角与阴影周期t变化规律拟合示意图;
[0050]
图4为本发明实施例中太阳翼驱动策略示意图;
[0051]
图5为本发明实施例中太阳翼非垂直照射偏离角示意图。
具体实施方式
[0052]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0053]
本发明提供了一种非太阳同步轨道通信卫星单轴太阳翼驱动方法,参照图1,包括以下步骤:
[0054]
步骤s1:基于轨道参数计算一年内卫星轨道光照角的变化曲线,所述轨道光照角为太阳矢量与卫星轨道面之间的夹角β,所述轨道参数包括轨道高度和轨道倾角。
[0055]
步骤s2:根据轨道光照角的变化趋势,太阳翼通过一维转动保证轨道周期内持续对日,太阳翼还通过一维摆动适应轨道光照角的变化。
[0056]
步骤s3:太阳翼一维摆动角度岁轨道光照角β变化超过设定角度c时,停止摆动,太阳翼只做一维转动,避免对通信载荷现场的遮拦,c=90
°‑
a,其中a为通信载荷视场角。
[0057]
步骤s4:当轨道光照角β变化超过设定角度d时,向卫星本体
‑
z方向摆动至90
°
,轨道光照角β为正值时太阳翼贴片面朝向卫星本体 y方向,β角为负值时太阳翼贴片面朝向星体
‑
y方向,减小太阳光非垂直入射太阳翼的最大偏离角,提高太阳翼使用效率,d=90
°‑
a/2,其中a为通信载荷视场角。
[0058]
基于轨道高度、倾角轨道参数计算一年内轨道阴影期t的变化曲线,将轨道阴影期t的变化曲线与轨道光照角的变化曲线进行拟合,获得卫星经历全光照期的太阳光照角阈值β1。基于一年内轨道阴影期t的变化曲线中最大阴影时间t1计算整星功耗和太阳翼垂直照射时输出功率比值(p
sat
/(1
‑
5%))/p
solar
,得到太阳翼在全光照期无需给蓄电池组充电时允许太阳光非垂直入射的最大偏离角b,p
sat
为卫星工作状态下整星功耗,b=arccos((p
sat
/(1
‑
5%))/p
solar
)。
[0059]
为保证该驱动方法能满足单圈能源平衡需求,
[0060]
若c大于β1,且a/2小于b,则太阳翼无需适应性增加面积;
[0061]
若c大于β1,且a/2大于b,则太阳翼面积需适应性增加,输出功率p
add1
需增加,
[0062]
若c小于β1,且a/2小于b,则在轨道光照角
‑
β1~
‑
c和c~β1变化区间内,轨道光照角每变1
°
,根据此时阴影时间计算所需太阳翼输出功率p1是否都小于p
solar
,若是则无需适应性增加太阳翼面积,若否则需要增加输出功率p
add2
;
[0063]
p1的计算如下:
[0064][0065]
式中:t
阴影
表示光照角β对应的地影时间,t
光照
轨道光照角β对应的光照时间;
[0066]
若p
solar
>p
max1
,p
max1
为p1的最大值,无需增大太阳翼面积;
[0067]
若p
solar
<p
max1
,则输出功率需增加p
add2
=p
max1
‑
p
solar
。
[0068]
若c小于β1,且a/2大于b,则太阳翼面积需适应性增加,输出功率需增加p
add3
,同时在轨道光照角
‑
β1~
‑
c和c~β1变化区间内,轨道光照角每变1
°
,根据此时阴影时间计算所需太阳翼输出功率p2是否都小于p
solar
p
add3
,若是则无需再适应性增加太阳翼面积,若否则输出功率需要再增加。
[0069]
p2的计算如下:
[0070][0071]
式中:t
阴影
表示光照角β对应的地影时间,t
光照
轨道光照角β对应的光照时间;
[0072]
若p
solar
p
add3
>p
max2
,p
max2
为p2的最大值,则无需增大太阳翼面积;
[0073]
若p
solar
p
add3
<p
max2
,则输出功率需再增加p
add3
=p
max2
‑
p
solar
‑
p
add3
;总功率增加为:p
add4
=p
add3
p
add3
=p
max2
‑
p
solar
。
[0074]
下面结合具体参数对本发明做进一步说明。
[0075]
本实施例结合某扁平堆叠发射的非太阳同步轨道通信卫星进行分析,但不局限于该卫星的轨道和构型。卫星工作在轨道高度1175km,倾角86.5
°
的非太阳同步轨道,扁平构型,太阳电池阵位于﹢y面,在轨展开后如图2所示。
[0076]
在本实施例中,卫星工作状态下整星功耗2000w,母线电压42v,通信载荷视场角55
°
。
[0077]
步骤1中,基于轨道高度、倾角等轨道参数计算1年内太阳矢量与卫星轨道面之间夹角β(轨道光照角)的变化曲线。可知轨道面光照角在
‑
88.92
°
至 78.82
°
之间变化,绝对值接近90
°
。
[0078]
根据1年内轨道阴影期t的变化曲线,可知轨道周期内最大阴影时间34.8分钟,有全光照期,持续时长29~48天。将其与轨道光照角的变化曲线进行拟合,获得卫星经历全光照期的太阳光照角阈值β1为58
°
,如图3所示。
[0079]
根据最大阴影时间和单圈能源平衡需求计算卫星所需太阳翼面积为12.4m2,太阳翼接收太阳光垂直照射时输出功率为3205.7w。
[0080]
太阳翼在全光照期无需给蓄电池组充电时允许太阳光非垂直入射的最大偏离角b
=arccos((p
sat
/(1
‑
5%))/p
solar
)=arccos(2000w(1
‑
5%)/3205.7w)=48.94
°
。太阳翼非垂直照射偏离角如图5所示。
[0081]
在步骤3中,角度c=90
°‑
55
°
=35
°
。
[0082]
在步骤4中,角度d=90
°‑
55
°
/2=62.5
°
。
[0083]
因此在本实施例中,太阳翼摆动分为三个状态,如图4所示:
[0084]
状态1:卫星太阳翼在轨道光照角
±
35
°
范围内随轨道光照角变化而摆动,转动轴一直跟着太阳转动;
[0085]
状态2:卫星太阳翼在轨道光照角
‑
62.5
°
~
‑
35
°
,35
°
~62.5
°
范围内停止摆动,摆动角固定在﹢35
°
或
‑
35
°
,只做一维转动;
[0086]
状态3:在
‑
90
°
~
‑
62.5
°
,62.5
°
~90
°
范围内停止摆动和转动,摆动角固定在﹢90
°
,太阳翼贴片面朝﹢y或
‑
y方向。
[0087]
同时,由于c小于β1,且a/2小于b,在轨道光照角
‑
58
°
~
‑
35
°
和35~58
°
区间内,轨道光照角每变1
°
,根据此时阴影时间计算所需太阳翼输出功率是否小于p
solar
,经计算均满足,因此无需适应性增加太阳翼面积。
[0088]
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统及其各个装置、模块、单元以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统及其各个装置、模块、单元以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同功能。所以,本发明提供的系统及其各项装置、模块、单元可以被认为是一种硬件部件,而对其内包括的用于实现各种功能的装置、模块、单元也可以视为硬件部件内的结构;也可以将用于实现各种功能的装置、模块、单元视为既可以是实现方法的软件模块又可以是硬件部件内的结构。
[0089]
在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
[0090]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。