1.本发明涉及玻璃基板及超薄柔性玻璃制造生产包装领域,并且更具体地,涉及一种玻璃基板包装系统及包装方法。
背景技术:
2.在tft
‑
lcd(薄膜晶体管液晶显示器)、盖板玻璃等玻璃基板的加工过程中,通常生产厚度0.7mm、0.5mm、0.4mm尺寸的玻璃。因玻璃基板是一种高精密透明的电子零件,它的厚度会直接影响着显示器的影像效果,甚至很大程度上影响着整个产品最终质量,所以显示器行业对玻璃基板的厚度提出了很高的要求,玻璃基板市场快速向减薄化产品转变,需要生产0.2mm、0.15mm、0.1mm等厚度的超薄玻璃。后加工成品包装使用成品玻璃连续加工的自动化生产线,包装方式是将玻璃以倾斜方式放置在倾斜80
°
的a型架上,并覆盖一层间隔纸进行包装,具体地包装方式采用间隔纸
‑
玻璃
‑
间隔纸层叠式,但0.2mm及以下超薄玻璃产品无法正常倾斜在80
°
的a型架上。因此,必须对生产线进行重新设计布局,抛弃传统倾斜a型架而改用水平平托架,检验包装区各设备在配套设置的电气系统控制下,实现统一协调运作进行平装叠加式的包装方式,从而满足高端产品的包装需求。
3.因此,期望获得一种实现玻璃基板的叠加水平包装的系统和方法。
技术实现要素:
4.针对现有技术的不足,本发明的目的在于提供一种令人期望的玻璃基板包装系统及其方法。
5.为了解决上述技术问题,本发明采用以下技术方案:
6.根据本发明的一方面,提供一种玻璃基板包装系统,包括:
7.玻璃基板,该玻璃基板在型材框架上传送;
8.第一机器人,该第一机器人从型材框架上抓取玻璃基板;
9.自动出纸台设备,该自动出纸台设备将间隔纸铺放在自动出纸台设备的玻璃包装台上,第一机器人将抓取的玻璃基板放置在间隔纸上;
10.第二机器人,该第二机器人从玻璃包装台上抓取玻璃基板和间隔纸;以及
11.装载平托架,该装载平托架被水平地放置并且装载平托架的表面是水平的,该第二机器人将抓取的玻璃基板和间隔纸平放在装载平托架的表面上。
12.在本发明的一个实施例中,该型材框架上设置有传送带,并且型材框架的两侧上设置有多个传动轮,传送带通过传动轮在型材框架上传送玻璃基板;
13.并且,在玻璃基板的传送方向上,型材框架的前部和后部分别设置有定位杆装置,每个定位杆装置包括气缸和与气缸连接的定位杆,型材框架的前部和后部的定位杆装置分别使各自的气缸致动以带动各自的定位杆先提升并且然后分别向在传送方向上的玻璃基板的前侧和后侧靠近而夹紧,以使传送的玻璃基板定位。
14.在本发明的一个实施例中,第一机器人位于第一滑道上,第一机器人的手臂上设
置有横架和从横架的不同位置平行延伸出来的多个第一支架,每个第一支架上设置有间隔开的多个第一吸盘装置,每个第一吸盘装置包括两个高度相等且平行设置的第一吸盘柱,第一吸盘柱的上端通过安装架固定连接在第一支架上,第一吸盘柱的下端连接有第一吸盘。
15.在本发明的一个实施例中,第一机器人的手臂上还设置有第一真空气路和第一电磁阀,第一真空气路与第一吸盘装置连接,第一真空气路通过第一电磁阀来控制通断。
16.在本发明的一个实施例中,自动出纸台设备位于第一机器人和第二机器人的中间,自动出纸台设备还包括出纸仓和执行器,执行器使间隔纸从出纸仓中出来并将间隔纸自动铺放在玻璃包装台上。
17.在本发明的一个实施例中,玻璃包装台上设置有位置传感器,位置传感器用于检测间隔纸的位置以使间隔纸在玻璃包装台上被放置就位。
18.在本发明的一个实施例中,第二机器人位于第二滑道上,第二机器人的手臂上设置有第二支架和设置在第二支架上的第二吸盘装置和第三吸盘装置,其中第二吸盘装置包括两个高度相等且平行设置的第二吸盘柱,第二吸盘柱的上端通过安装架固定连接在第二支架上,第二吸盘柱的下端连接有第二吸盘,第二吸盘柱和第二吸盘用于吸附玻璃基板;第三吸盘装置包括平行设置的第二吸盘柱和第三吸盘柱,第三吸盘柱比第二吸盘柱高玻璃基板的厚度,第三吸盘柱的上端通过安装架固定连接在第二支架上,第三吸盘柱的下端连接有第三吸盘,第三吸盘柱和第三吸盘用于吸附间隔纸。
19.在本发明的一个实施例中,第二机器人的手臂上还设置有第二真空气路和第二电磁阀,第二真空气路与第二吸盘装置和第三吸盘装置连接,第二真空气路通过第二电磁阀来控制通断。
20.在本发明的一个实施例中,装载平托架至少包括两个装载平托架。
21.根据本发明的另一方面,提供一种利用上述的玻璃基板包装系统对玻璃基板进行包装的方法,其特征在于,该方法包括以下步骤:
22.将玻璃基板在型材框架上传送;
23.通过第一机器人从型材框架上抓取玻璃基板;
24.使用所自动出纸台设备将间隔纸铺放在自动出纸台设备的玻璃包装台上;
25.利用第一机器人将抓取的玻璃基板放置在间隔纸上;
26.通过第二机器人从玻璃包装台上抓取玻璃基板和间隔纸;
27.利用第二机器人将抓取的玻璃基板和间隔纸平放在装载平托架上;
28.重复上述步骤以在装载平托架上完成玻璃基板叠加水平包装。
29.通过采用上述技术方案,本发明相比于现有技术具有如下优点:
30.本发明系统中的各个设备能够在配套设置的电气控制系统下实现统一协调运作,本发明实现了超薄玻璃的叠加水平包装,本发明包装效率高,极大地提升了包装节拍和品质。
附图说明
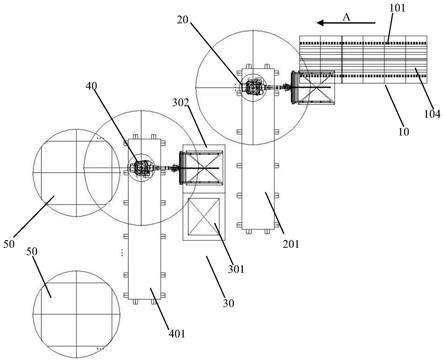
31.图1示出了本发明提供的玻璃基板包装系统的示意图;
32.图2示出了本发明提供的第一机器人抓取玻璃基板时的结构示意图;
33.图3示出了本发明提供的第二机器人将抓取的玻璃基板和间隔纸放置在装载平托架时的结构示意图。
34.附图标记列表
35.10型材框架、101传动轮、102传动带、103定位杆装置、104玻璃基板、20第一机器人、201第一滑道、202横架、203第一支架、204第一吸盘装置、205第一吸盘柱、206第一吸盘、30自动出纸台设备、301出纸仓、302玻璃包装台、303间隔纸、40第二机器人、401第二滑道、402第二支架、403第二吸盘装置、404第三吸盘装置、405第二吸盘柱、406第二吸盘、407第三吸盘柱、408第三吸盘、409安装架、50装载平托架、a传送方向。
具体实施方式
36.应当理解,在示例性实施例中所示的本发明的实施例仅是说明性的。虽然在本发明中仅对少数实施例进行了详细描述,但本领域技术人员很容易领会在未实质脱离本发明主题的教导情况下,多种修改是可行的。相应地,所有这样的修改都应当被包括在本发明的范围内。在不脱离本发明的主旨的情况下,可以对以下示例性实施例的设计、操作条件和参数等做出其他的替换、修改、变化和删减。
37.参照图1
‑
3,本发明提供一种玻璃基板包装系统,包括:
38.玻璃基板104,该玻璃基板104在型材框架10上传送;
39.第一机器人20,该第一机器人20从型材框架10上抓取玻璃基板104;
40.自动出纸台设备30,该自动出纸台设备30将间隔纸303铺放在自动出纸台设备30的玻璃包装台302上,第一机器人20将抓取的玻璃基板104放置在间隔纸303上;
41.第二机器人40,该第二机器人40从玻璃包装台302上抓取玻璃基板104和间隔纸303;以及
42.装载平托架50,该装载平托架50被水平地放置并且装载平托架50的表面是水平的,第二机器人40将抓取的玻璃基板104和间隔纸303平放在装载平托架50的表面上。
43.本发明提供的玻璃基板包装系统在玻璃基板104定位在型材框架10上之后,自动出纸台设备30首先将间隔纸303铺放在自动出纸台设备30的玻璃包装台302上,待间隔纸303铺放结束后,第一机器人20将抓取型材框架30上的玻璃基板104并将该玻璃基板104放置到在玻璃包装台302上准备的间隔纸303上,接着第二机器人40可以抓取放置好的玻璃基板104和间隔纸303并将玻璃基板104和间隔纸303平放到装载平托架50上,以此完成玻璃基板的平放,重复上述操作可以实现玻璃基板叠加水平包装,从而达到玻璃基板的平包装功能,极大地提升了包装节拍和品质,而且,本发明操作快速简便,节省了时间和成本。
44.在上述结构中,再次参照图1
‑
2,为了便于玻璃基板104的传送,型材框架10上设置有传送带102,并且型材框架10的两侧上设置有多个传动轮101,传送带102通过传动轮101在型材框架10上传送玻璃基板104。
45.在上述结构中,再次参照图1
‑
2,为了便于第一机器人20能够高精准地抓取玻璃基板104,避免传送偏差影响,使抓取位置同一,在玻璃基板104的传送方向a上,型材框架10的前部和后部分别设置有定位杆装置103,每个定位杆装置103包括气缸和与气缸连接的定位杆,型材框架10的前部和后部的定位杆装置103分别使各自的气缸致动以带动各自的定位杆先提升并且然后分别向在传送方向a上的玻璃基板104的前侧和后侧靠近而夹紧,以使传
送的玻璃基板104定位,该定位杆装置103可以使玻璃基板104每次定位在相同位置,由此第一机器人20可以在同一位置高精准地抓取玻璃基板104。
46.在上述结构中,再次参照图2,为了便于第一机器人20移动,第一机器人20位于第一滑道201上。为了更好地使第一机器人20抓取玻璃基板104,第一机器人20的手臂上设置有横架202和从横架202的不同位置平行延伸出来的多个第一支架203,每个第一支架203上设置有间隔开的多个第一吸盘装置204,每个第一吸盘装置204包括两个高度相等且平行设置的第一吸盘柱205,第一吸盘柱205的上端通过安装架(未示出)固定连接在第一支架203上,第一吸盘柱205的下端连接有第一吸盘206。当第一机器人20将要抓取玻璃基板104时,第一机器人20的第一吸盘装置204可以形成真空,由此玻璃基板104可以被真空的第一吸盘206吸附住。
47.在上述结构中,再次参照图1,为了更加方便地提供间隔纸303,本发明的自动出纸台设备位于第一机器人20和第二机器人40的中间,自动出纸台设备还包括出纸仓301和执行器(未示出),执行器使间隔纸303从出纸仓301中出来并将间隔纸303自动铺放在玻璃包装台302上。
48.在上述结构中,玻璃包装台302上设置有位置传感器(未示出),位置传感器用于检测间隔纸303的位置以使间隔纸303在玻璃包装台302上被放置就位。
49.在上述结构中,再次参照图1和3,为了便于第二机器人40移动,第二机器人40位于第二滑道401上。为了更好地使第二机器人40抓取玻璃基板104和间隔纸303,第二机器人40的手臂上设置有第二支架402和设置在第二支架402上的第二吸盘装置403和第三吸盘装置404,其中第二吸盘装置403包括两个高度相等且平行设置的第二吸盘柱405,第二吸盘柱405的上端通过安装架409固定连接在第二支架402上,第二吸盘柱405的下端连接有第二吸盘406,第二吸盘柱405和第二吸盘406用于吸附玻璃基板104;第三吸盘装置404包括平行设置的第二吸盘柱405和第三吸盘柱407,第三吸盘柱407比第二吸盘柱405高玻璃基板的厚度,第三吸盘柱407的上端也通过安装架409固定连接在第二支架402上,第三吸盘柱407的下端连接有第三吸盘408,第三吸盘柱407和第三吸盘408用于吸附间隔纸303。
50.在上述结构中,为了实现各个吸盘装置的真空效果以便吸附住玻璃基板104和间隔纸303,第一机器人20的手臂上设置有第一真空气路(未示出)和第一电磁阀(未示出),第一真空气路与第一吸盘装置204连接,第一真空气路通过第一电磁阀来控制通断;第二机器人40的手臂上设置有第二真空气路(未示出)和第二电磁阀(未示出),第二真空气路与第二吸盘装置和第三吸盘装置连接,第二真空气路通过第二电磁阀来控制通断。
51.在上述结构中,为了更加准确且成本效益地实现真空吸附,第一真空气路和第二真空气路中形成的真空值的范围是4
‑
5kgf/cm2。
52.在上述结构中,为了便于完成玻璃基板的平包装,装载平托架50至少包括两个装载平托架50。
53.在上述结构中,玻璃基板104的厚度可以在0.2mm以下。
54.通过本发明,最终平包装精度控制可以为间隔纸303的偏移量在0.2mm以内,玻璃基板104的偏移量在0.2mm以内,间隔纸303同玻璃基板104的偏移量可控制在0.3mm以内。
55.此外,本发明还提供一种利用上述的玻璃基板包装系统对玻璃基板进行包装的方法,方法包括以下步骤:将玻璃基板在型材框架上传送;通过第一机器人从型材框架上抓取
玻璃基板;使用所自动出纸台设备将间隔纸铺放在自动出纸台设备的玻璃包装台上;利用第一机器人将抓取的玻璃基板放置在间隔纸上;通过第二机器人从玻璃包装台上抓取玻璃基板和间隔纸;利用第二机器人将抓取的玻璃基板和间隔纸平放在装载平托架上;重复上述步骤以在装载平托架上完成玻璃基板叠加水平包装。
56.下面通过具体实施例对本发明进一步进行详细地说明。
57.如图1所示,一种玻璃基板包装系统,包括玻璃基板104及其传送机构、在第一滑道201上的第一机器人20、包含出纸仓301和玻璃包装台302的自动出纸台设备30、在第二滑道401上的第一机器人40和两个装载平托架50,自动出纸台设备30位于第一机器人20和第二机器人40的中间。
58.第一机器人20从玻璃基板的传送机构的型材框架10上抓取玻璃基板104,自动出纸台设备30将出纸仓301内的间隔纸303放置在玻璃包装台302上,第一机器人20在第一滑道201上移动到玻璃包装台302,通过转向将抓取的玻璃基板104放置在玻璃包装台302上的间隔纸303上,第二机器人40在第二滑道401上移动到玻璃包装台302来将玻璃包装台302上的玻璃基板104和间隔纸303抓取,然后第二机器人40通过第二滑道401滑动到装载平托架50,通过转向将抓取的玻璃基板104和间隔纸303平放到相应的装载平托架上,由于装载平托架50被水平地放置且其表面也是水平的,由此本发明完成了玻璃基板的水平包装。
59.如图2所示,图2详细地示出了第二机器人20抓取传送的玻璃基板104时的结构示意图。对于在传送机构上的玻璃基板104,该传送机构的型材框架10上具有传送带102以及型材框架10的两侧上设置有两排传动轮101,传送带102通过传动轮101将玻璃基板104传送至第一机器人20以待第一机器人20抓取,在玻璃基板104的传送方向a上,在传送机构的前后分别设置有定位杆装置103,每个定位杆装置103包括气缸和与气缸连接的定位杆,两个定位杆装置103分别可以使各自的气缸致动以带动各自的定位杆提升并且然后分别向在传送方向a上的玻璃基板104的前侧和后侧靠近而夹紧,从而可以使传送的玻璃基板104定位以便第一机器人20抓取。
60.第一机器人20的手臂上设置有横架202和从横架202的不同位置平行延伸出来的三个第一支架203,每个第一支架203上设置有间隔开的4个第一吸盘装置204,每个第一吸盘装置204包括两个高度相等且平行设置的第一吸盘柱205,第一吸盘柱205的上端通过安装架固定连接在第一支架203上,第一吸盘柱205的下端连接有第一吸盘206。当第一机器人20抓取玻璃基板104时,第一机器人20的第一吸盘装置204可以形成真空,由此玻璃基板104可以被真空的多个第一吸盘206(例如,图2中所示为12个)吸附住,从而实现第一机器人20抓取定位在型材框架10上的玻璃基板104。
61.如图3所示,图3更详细地示出了第二机器人将抓取的玻璃基板和间隔纸放置在装载平托架时的结构示意图。第二机器人40的手臂上设置有第二支架402和设置在第二支架402上的第二吸盘装置403和第三吸盘装置404,第二吸盘装置403包括两个高度相等且平行设置的第二吸盘柱405,第二吸盘柱405的上端通过安装架409固定连接在第二支架402上,第二吸盘柱405的下端连接有第二吸盘406,第二吸盘柱405和第二吸盘406用于吸附玻璃基板104;第三吸盘装置404包括平行设置的第二吸盘柱405和第三吸盘柱407,第三吸盘柱407比第二吸盘柱405高玻璃基板的厚度,第三吸盘柱407的上端也通过安装架409固定连接在第二支架402上,第三吸盘柱407的下端连接有第三吸盘408,第三吸盘柱407和第三吸盘408
用于吸附间隔纸303,在本实施例中,第三吸盘装置通常位于第二支架402的端部处,也就是第三吸盘装置404通常设置在玻璃基板与未被玻璃基板覆盖的间隔纸处,从而当第二机器人40抓取时,第二吸盘装置403和第三吸盘装置404都形成真空,此玻璃基板104可以被真空的多个第二吸盘406吸附住,间隔纸303可以被多个真空的第三吸盘408吸附住。
62.由此本发明的玻璃基板包装系统在运行时,玻璃基板104在型材机构上由传送带102通过型材框架10两侧设置的传动轮101在型材框架10上传送,在传送方向a上,型材框架10的前后分别设置有定位杆装置103,当第一机器人20需要抓取待包装的玻璃基板104时,型材框架10上前后的定位杆装置103会将传送的玻璃基板104定位在型材框架10上,此时第一机器人20可以准备地抓取该玻璃基板104,自动出纸台设备30通过设置的执行器将出纸仓301内的间隔纸303放置在玻璃包装台302上,第一机器人20的手臂上的第一吸附装置204形成真空,通过形成真空的第一吸盘206将定位的玻璃基板104抓取,然后第一机器人20通过第一滑道201移动到准备好间隔纸303的玻璃包装台302,第一机器人20通过调整方向以将抓取的玻璃基板104放置在玻璃包装台302上的间隔纸303上,此时第二机器人40通过第二滑道401移动到玻璃包装台302,第二机器人40的手臂上的第二吸附装置403和第三吸附装置404都形成真空,通过形成真空的第二吸盘406将玻璃基板104吸附抓取,形成真空的第三吸盘408将间隔纸303吸附抓取,此时第二机器人40通过第二滑道401将吸附抓取的玻璃基板104和间隔纸303移动到装载平托架50上,以将玻璃基板104和间隔纸303平放在装载平托架50上。对每个玻璃基板重复上述操作,从而实现玻璃基板叠加水平包装,从而达到玻璃基板的平包装功能,极大地提升了包装节拍和品质。
63.以上所述仅为本发明的较佳实施例,并非用来限定本发明的实施范围;如果不脱离本发明的精神和范围,对本发明进行修改或者等同替换,均应涵盖在本发明权利要求的保护范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。