用于在模块式涂覆设备中输送并移动基片的优化系统和方法
1.本发明提供一种用于涂覆基片的解决方案,基片借助于载具被移动,载具可以在具有如下系统的连续串列生产设备中的涂装、涂覆或处理模块之间移动,该系统允许在用于关键工艺过程,例如物理气相沉积(pvd)涂覆、uv硬化和红外闪照的有限来回回转运动,即所谓摇摆模式,与基片处于喷涂或干燥工艺模块中时的基片连续回转运动之间轻松切换。
背景技术:
2.ribero等人(us 10,016,774 b2)、spangler等人(us 2009/0277384 a1)和keckes等人(us 9,476,116 b2,us 9,529,450 b2)充分描述了在复合加工线上对基片进行喷涂、涂覆和处理的过程。具有明显经济优势的是使用模块化串列方法来允许连续处理,而不是在批处理中使用不同的大型处理室。
3.但是,主要的挑战是每个模块使用不同的工艺,例如通过蚀刻、超声波或等离子工艺清洁基片;通过磁控溅射式或电弧放电式物理气相沉积(pvd)在针对每个pvd模块使用至少一个溅射靶的情况下涂覆单层或多层系统;用于喷涂涂覆弥散体、uv硬化漆的涂装过程;通过由热源例如红外源烘烤基片、由uv发射源固化和/或硬化所述漆来进行漆处理。所有这些过程都需要基片的特定位置和运动。每个过程的进展相当快速,在几分钟内甚至更快完成。因此,重要的是能够从一种基片运动切换到另一种基片运动而不中断连续工艺过程。
4.基片在每个模块之间的输送和运动通常借助载具来完成,载具通过输送带来移动。载具支承有一个或多个通常呈筒形的转动轴杆,轴杆上安装有小尺寸的基片。该筒体通过轴杆以不同的转速转动并且能够与在处理模块内的输送带运动同步。
5.基本问题
6.其中一项挑战是提供一种简单而经济的解决方案,用于在各个模块之间输送基片,同时提供优化的基片运动,其适应于模块中的不同加工过程而不会增加系统复杂性。
7.例如在pvd过程中,相对于靶来精确定位基片是极其重要的,在此,材料被蒸发。如果零件在沉积过程中不移动,则所产生的层将很可能不是均匀的,因为所述材料从靶表面的蒸发和扩散呈现非均匀性。这就是为何基片要通过转动筒体在靶的前方移动。在靶前方的暴露时间决定了涂层厚度和涂层厚度分布。
8.另一方面,uv硬化漆的喷涂例如将需要基片的另一种运动,因为喷涂到基片上的悬浮颗粒在硬化过程发生前将仍保持流体相,并且在零件未以某种方式移动的情况下可能流失。借助ir的热处理或漆的uv固化将要求更均匀的基片运动,以便以更均匀的方式将热或光散布到基片上。
9.在此情况下的最简单的解决方案是将相同的回转运动用于每个过程,允许对每个过程的转速进行一定调节。当待涂覆或待喷涂的基片相对小且能够被安放在筒形支座上时,这将在大多数情况下是可接受的。
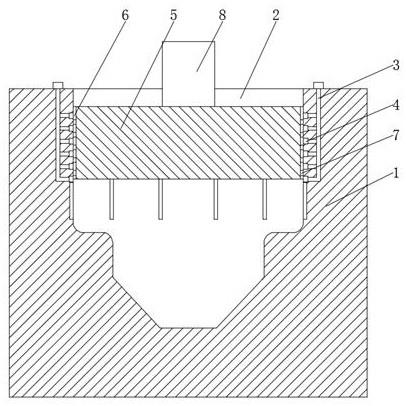
10.图1示出现有技术的这种具体实施例,在这里,支承两个筒体的两个轴杆(5)在物理气相沉积室(1)内被安放在溅射靶(4)前方。输送带(3)允许执行附加的来回运动,以改善
基片上的涂层质量和涂层分布。图2示出了用于此简单回转模式的机械解决方案,在此,轴杆(5)被安装在载具(2)上。轴杆具有轴杆齿轮(51),其被移动链(41)驱动并通过伺服电机(40)被控制。
11.但考虑到基片较大,这种运动相当有限,在此,简单的回转将不足以产生期望的涂层质量。图3示出了这种情况,在此,两个较大的基片被安装在轴杆而不是筒形基片支架上。从在溅射靶(4)和基片(7)之间的用于获得可接受涂层的短距离知道,轴杆无法再像在自由筒状回转模式中那样完全转动。唯一可能性是利用输送带使基片以来回水平运动的方式运动,以优化在基片上的涂层厚度分布。但这些运动受到模块尺寸的限制。因为典型的大基片尺寸在0.6
‑
1.5米之间,故来回运动将被限制到约
‑
300毫米至300毫米。即便利用在靶前方的基片附加来回运动,在边缘处的涂层仍将更厚,因为基片没有完全移动离开靶且在基片经过时将与另一靶重叠。
12.发明目的
13.本发明的目的是提供一种载具,其能在具有以下系统的连续串列生产设备中从一个涂装、涂覆或处理模块运动,该系统允许在基片的有限来回回转运动即所谓摇摆模式与回转运动之间轻松切换。以下段落中更详细描述本发明系统以及优选的附加实施例。
14.本发明的解决方案和不同可能的基片被允许的运动在图4a和4b中被示出。图4a示出摇摆模式的位置,图4b示出自由回转模式的位置。载具(2)可以通过输送带从一个涂装、涂覆或处理模块运动到另一个涂装、涂覆或处理模块,并且包括至少一个轴杆(7),其支承基片架或大尺寸,但相对扁平,长度在0.6
‑
1.5米之间的基片。“相对扁平”意味着在基片的长度和高度之间的长高比大于或等于2,但不大于1500。紧邻载具底部就位的接合齿轮(30)被链(41)驱动,链优选位于载具的下部且被伺服电机(40)控制,伺服电机产生在两个方向上的链连续运动或间歇运动。接合杆(31)被附接在接合齿轮(30)的距轴线的一定径向距离处,并且也附接在与轴杆的轴芯对准的轴杆夹(32)上。轴杆夹(32)优选呈盘状并在上方具有开口,开口具有一定形状,呈锥形、矩形或至少角形。轴杆的轴芯具有至少一个部分(72),其形状部分匹配于轴杆夹的敞开插口的形状,优选是矩形的,从而当轴杆的轴芯位于轴杆夹的开口内时,轴杆被机械联接至轴杆夹且能够随轴杆夹转动。
15.接合杆长度以及杆在轴杆夹和接合齿轮上的附接位置被相应设定,使得当接合齿轮完整转动时,轴杆在关于载具的水平面测量的,优选为 30
°
至
‑
30
°
的范围内做来回运动。轴杆的来回运动或摇摆运动的频率可以通过经由伺服电机设定链速度来设定。在工艺过程中,摇摆运动可以是连续的或按照某些规定角度和某些规定时间来间歇(调整)进行的。
16.轴杆的摇摆运动可以由借助输送带的载具水平来回运动来补充。根据模块尺寸,此距离可以是在pvd涂覆室内的约
‑
300毫米至300毫米。
17.在两个最大角度,优选是 30
°
和
‑
30
°
之间的摇摆运动的频率可以在0.1至10赫兹之间改变。
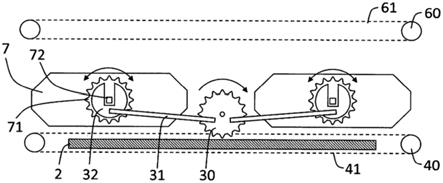
18.本发明的设备允许从接合齿轮和轴杆夹相互接合的摇摆模式切换到典型的回转模式(图4b),做法是使轴杆上移以致轴杆的轴芯移动到轴杆夹开口外。这通过借助在底部的液压马达提升载具来完成。轴杆包括轴杆齿轮(71),其能够通过链系统(61)被转动,链系统位于载具上侧且被另一伺服电机(60)驱动。在此构型中,轴杆不再机械接合至轴杆夹并且可以伴随链连续运动而连续回转。但链被伺服电机控制,其也允许产生在两个方向上的
间歇运动。一旦不再需要连续回转模式,当载具回到初始低位时,轴杆能够回到初始水平位置。
19.第二轴杆或更多轴杆可以位于载具上。在两个轴杆情况下,接合齿轮位于两个轴杆之间。所述接合杆和轴杆夹二者都以对称的方式布置在第二轴杆上。
20.当载具正从一个模块移动至另一模块时,这种齿轮系统允许在连续回转模式和摇摆模式之间快速切换。
21.图5a、5b和5c示出在处于摇摆模式时轴杆(7)能够在pvd涂覆室(1)内具有的不同的位置。图5a示出初始位置,在此,基片(7)直接就位在溅射靶(4)前方。基片可以移动到距初始位置300毫米的最大距离的所述室最左侧位置,如图5b所示。水平运动通过输送带来完成。在此,
‑
30
°
角度允许在基片边缘和靶之间有较大距离,允许补偿在基片边缘处的涂层厚度不均匀性。图5c示出基片位于所述涂覆室最右侧时的对称情况。在此,基片的角度是相对于水平面呈30
°
。
22.如图5a、5b、5c所示的位置可被设定为静止位置或设定为在基片来回水平运动和摇摆运动之间的顺畅组合运动,它们通过其相应运动频率来限定。这在不同的处理模块中增加了一个参数以更好地控制涂层质量、热暴露或干燥过程。
23.本发明设备的另一优点是可以在pvd涂覆期间额外地组合关于靶的基片机械运动,和根据在涂覆室内的基片具体位置改变靶上地溅射源功率。特别是,来回运动可以与靶磁控溅射的功率源同步化,以在基片靠近靶或远离靶时允许在低功率和高功率之间顺畅转变。这样,在载具在涂覆模块内做有限来回运动的同时,可以实现涂层厚度的控制。
24.图6a、6b和6c示出本发明的另一实施例,在此,被下链(41)驱动的接合齿轮(30)在轴向上与主传动齿轮(300)接合,其与允许摇摆角度微调的小齿轮(301)接合,所述摇摆角度能够视载具尺寸而改变。接合杆也包括在每一侧有两个螺钉(303)的调节装置(302),其允许控制和调节接合杆长度。这种调节因为制造公差变化而是必要的,尤其当轴杆与接合齿轮之间的距离相当大时。
25.机械连接的具体定位和轴杆夹的附接半径被如此设计,即,小齿轮的完整转动仅允许轴杆齿轮在相对于水平面的
‑
30
°
至30
°
之间运动。这些角度限制在某些过程中是重要的,因为在工艺模块中的靶、ir灯或uv源与基片之间的距离是很窄且关键的。设置机械限制也是一种方式,从而昂贵的uv发射源不会在处理过程中因在uv处理模块中错误产生较大基片的完整转动而被损坏。
26.本发明设备的另一优点是当位于一个模块中,例如在pvd涂覆或uv固化期间,能够结合较大基片的摇摆运动,以及当所述较大基片位于另一模块内,例如在涂装过程中时,能够从摇摆模式改变至完全回转模式。在此特定情况下,较大基片的摇摆运动或静止定位将不会是最佳的,因为呈悬浮体形式涂装的漆或uv硬化漆在硬化过程开始之前仍然保持流态,并且在零件未连续移动的情况下可能流失。借助热源或红外源的热处理也需要基片的回转运动,以便以更均匀方式将红外源的热扩散于基片的整个范围。
27.利用作为说明示例而不是对本发明限制的不同实施例,示出了本发明的设备允许较大基片的涂覆和处理,保持简单的输送和运动系统并限制到至少两个伺服电机、两个链和能够在不同模块之间被快速调节的若干齿轮,同时沿用利用轴杆涂覆较小样本的标准过程。
附图说明
28.图1示出载具的总体概览图,其在pvd涂覆室内输送两个可转动的筒形轴杆并且位于两个溅射靶前方。
29.图2示出筒形轴杆的回转模式的机械设计,它们经由齿轮轴杆被由伺服电机驱动的链驱动。
30.图3示出载具的总体概览图,其在pvd涂覆室内输送两个用于相对扁平的大基片的轴杆并且位于两个溅射靶的前方。
31.图4a示出处于摇摆模式的两个轴杆的机械设计,轴杆载有位于低位的较大的扁平基片,在该低位,该中心齿轮通过下链产生轴杆的摇摆运动。
32.图4b示出处于回转模式的两个轴杆的机械设计,轴杆载有处于高位的相对扁平的较大基片,在高位,轴杆齿轮通过上链产生轴杆的回转运动。
33.图5a示出两个轴杆处于摇摆模式时的可能角度(在相对于水平面的
‑
30
°
至30
°
之间),该轴杆载有较大的相对扁平的基片且位于在pvd涂覆机内的pvd靶之前。
34.图5b示出处于摇摆模式的两个轴杆,它们位于关于pvd靶而言的最左侧位置且具有
‑
30
°
的最小摇摆角度。
35.图5c示出处于摇摆模式的两个轴杆,它们位于关于pvd靶而言的最右侧位置且具有 30
°
的最大摇摆角度。
36.图6a示出在摇摆模式的优选实施例中的机构细节,此时轴杆位于轴杆夹内且具有关于水平面的0
°
角度。
37.图6b示出在摇摆模式的优选实施例中的机构细节,此时轴杆位于轴杆夹内且具有关于水平面的30
°
角度。
38.图6c示出在摇摆模式的优选实施例中的齿轮机构的详细俯视图,其中示出了传动齿轮和接合杆。
39.附图标记列表
40.1物理气相沉积(pvd)涂覆室
41.2载具
42.3输送带
43.4溅射靶
44.5轴杆
45.7基材架
46.30接合齿轮
47.31接合杆
48.32轴杆夹
49.40下伺服电机
50.41下链
51.60上伺服电机
52.61上链
53.71轴杆齿轮
54.72特殊造型的轴杆轴芯
55.300传动齿轮
56.301小接合齿轮
57.302用于接合杆的可调装置
58.303用于接合杆长度调节的螺钉
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。