1.本实用新型涉及光伏板清洗领域,具体涉及一种光伏板清洗机器人中安装行走机构。
背景技术:
2.光伏是太阳能光伏发电系统的简称,是一种利用太阳电池半导体材料的光伏效应,将太阳光辐射能直接转换为电能的一种新型发电系统,有独立运行和并网运行两种方式,由于光伏板长时间暴露在空气中,光伏板便面会落上灰尘甚至是鸟粪,影响光伏板的发电效率,因此就需要用机器人进行清洗。
3.现有技术存在以下不足:现有的大部分清洁机器人中的行走机构它的转向并不稳定,从而会对清洁机器人的移动造成影响。
4.因此,发明一种光伏板清洗机器人中安装行走机构很有必要。
技术实现要素:
5.为此,本实用新型提供一种光伏板清洗机器人中安装行走机构,通过驱动结构使清洁机器人进行移动,同时通过转向结构使清洁机器人进行稳定的转向,以解决现有的大部分清洁机器人中的行走机构它的转向并不稳定的问题。
6.为了实现上述目的,本实用新型提供如下技术方案:一种光伏板清洗机器人中安装行走机构,包括行走机构,所述行走机构顶部设有清洗机构,所述行走机构包括车架;和
7.连接在车架右端内壁的驱动结构;和
8.连接在车架左端内壁的转向结构;
9.所述转向结构包括两组轮胎二、支撑板、和气缸,所述轮胎二内壁安装小转轴,所述小转轴的一端通过轴承连接旋转板,所述旋转板内壁通过轴承安装支撑杆,所述旋转板的一端安装旋转夹板,所述旋转夹板内壁通过销钉活动连接移动杆,所述移动杆的中端插接在支撑板的顶端内壁,所述移动杆的一端安装移动板,所述气缸的输出端通过活塞杆连接移动板。
10.优选的,所述车架左侧内壁两端开设有滑槽,所述滑槽内壁插接小转轴。
11.优选的,所述车架底部内壁两端安装支撑杆,所述车架底部左侧内壁安装支撑板,所述车架左侧内壁一端安装气缸。
12.优选的,所述驱动结构包括大转轴、箱体、齿轮一和齿轮二,所述车架右侧内壁两端通过轴承连接大转轴,所述大转轴的两端安装轮胎一。
13.优选的,所述箱体内壁安装伺服电机,所述伺服电机的输出端安装连接杆。
14.优选的,所述齿轮一内壁安装连接杆,所述齿轮二内壁安装大转轴。
15.优选的,所述齿轮一通过链条连接齿轮二,所述车架右侧内壁一端安装箱体。
16.优选的,所述轮胎一的大小与轮胎二的大小一致,所述齿轮一的直径大于所述齿轮二的直径。
17.本实用新型的有益效果是:
18.1.当需要清洗机器人进行移动时,启动伺服电机吗,启动后,伺服电机就会通过连接杆带动齿轮一进行旋转,旋转的齿轮一就会通过链条带动齿轮二进行旋转,旋转的齿轮二就会带动大转轴进行旋转,旋转的大转轴就会带动轮胎一进行旋转,旋转的轮胎一就会带动清洗机器人进行移动,当需要清洗机器人进行转向时,通过气缸带动移动板进行移动,移动的移动板就会带动移动杆进行移动,移动的移动杆就会带动两组旋转板朝同一方向转动,转动的旋转板就会带动转轴进行转动,转动的转轴就会带动轮胎一进行转动,从而达到对清洗机器人进行稳定的转向,通过可以对清洗机器人进行稳定的转向,不仅会提高清洁机器人的移动稳定性,还会提高清洗机器人的移动准确性;
19.2.通过转向结构使清洁机器人进行稳定的转向,具有体积小,零件少以及成本低的作用。
附图说明
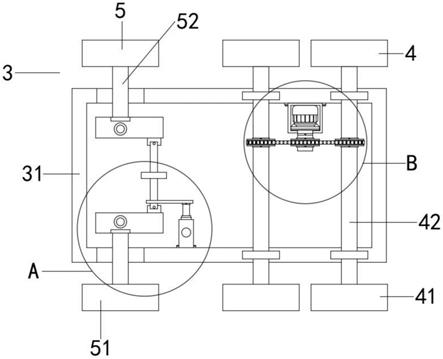
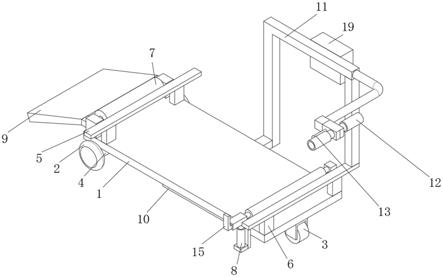
20.图1为本实用新型提供的整体结构示意图;
21.图2为本实用新型提供的结构俯视示意图;
22.图3为本实用新型提供的图2中a处结构放大示意图;
23.图4为本实用新型提供的图2中b处结构放大示意图;
24.图5为本实用新型提供的转向结构正视示意图。
25.图中:清洗机构2、行走机构3、车架31、驱动结构4、轮胎一41、大转轴42、箱体43、伺服电机44、连接杆45、齿轮一46、齿轮二47、链条48、转向结构5、轮胎二51、小转轴52、滑槽53、旋转板54、支撑杆55、旋转夹板56、移动杆57、支撑板58、气缸59、移动板591。
具体实施方式
26.以下结合附图对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。
27.参照附图1
‑
图5,本实用新型提供的一种光伏板清洗机器人中安装行走机构,一种光伏板清洗机器人中安装行走机构,包括行走机构3,行走机构3顶部设有清洗机构2,行走机构3包括车架31;和
28.连接在车架31右端内壁的驱动结构4;和
29.连接在车架31左端内壁的转向结构5;
30.进一步地,转向结构5包括两组轮胎二51、支撑板58、和气缸59,轮胎二51内壁安装小转轴52,小转轴52的一端通过轴承连接旋转板54,旋转板54内壁通过轴承安装支撑杆55,旋转板54的一端安装旋转夹板56,旋转夹板56内壁通过销钉活动连接移动杆57,移动杆57的中端插接在支撑板58的顶端内壁,移动杆57的一端安装移动板591,气缸59的输出端通过活塞杆连接移动板591,具体的,轮胎二51通过小转轴52具有进行旋转的作用,小转轴52对轮胎二51具有支撑作用,旋转板54具有带动小转轴52进行转动的作用,小转轴52具有带动轮胎二51进行转动的作用,支撑杆55对旋转板54具有支撑作用,旋转板54通过轴承具有在支撑杆55上进行旋转的作用,移动杆57通过销钉具有在旋转夹板56中进行旋转的作用,移动的移动杆57通过旋转夹板56具有带动旋转板54进行转动的作用,支撑板58对移动杆57具
有支撑作用,移动杆57具有在支撑板58中进行移动的作用,移动杆57对移动板591具有固定作用,气缸59是引导活塞在缸内进行直线往复运动的圆筒形金属机件,空气在发动机气缸中通过膨胀将热能转化为机械能,气体在压缩机气缸中接受活塞压缩而提高压力,气缸59具有带动移动板591进行移动的作用,移动板591具有带动移动杆57进行移动的作用。
31.进一步地,车架31左侧内壁两端开设有滑槽53,滑槽53内壁插接小转轴52,具体的,小转轴52具有在滑槽53中进行转动的作用。
32.进一步地,车架31底部内壁两端安装支撑杆55,车架31底部左侧内壁安装支撑板58,车架31左侧内壁一端安装气缸59,具体的,车架31底部内壁两端对支撑杆55具有固定作用,车架31底部左侧内壁对支撑板58具有固定作用,车架31左侧内壁一端对气缸59具有固定作用。
33.进一步地,驱动结构4包括大转轴42、箱体43、齿轮一46和齿轮二47,车架31右侧内壁两端通过轴承连接大转轴42,大转轴42的两端安装轮胎一41,具体的,大转轴42具有带动轮胎一41进行旋转的作用。
34.进一步地,箱体43内壁安装伺服电机44,伺服电机44的输出端安装连接杆45,具体的,伺服电机44具有带动连接杆45进行旋转的作用,伺服电机44是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
35.进一步地,齿轮一46内壁安装连接杆45,齿轮二47内壁安装大转轴42,具体的,连接杆45具有带动齿轮一46进行旋转的作用。
36.进一步地,齿轮一46通过链条48连接齿轮二47,车架31右侧内壁一端安装箱体43,具体的,齿轮一46通过链条48具有带动齿轮二47进行旋转的作用。
37.进一步地,轮胎一41的大小与轮胎二51的大小一致,齿轮一46的直径大于齿轮二47的直径,具体的,通过将轮胎一41的大小与轮胎二51的大小设置成一致具有提高行走的稳定性,通过将齿轮一46的直径设置成大于齿轮二47的直径具有提高传动的稳定性。
38.本实用新型的使用过程如下:当需要清洗机器人进行移动时,启动伺服电机44吗,启动后,伺服电机44就会通过连接杆45带动齿轮一46进行旋转,旋转的齿轮一46就会通过链条48带动齿轮二47进行旋转,旋转的齿轮二47就会带动大转轴42进行旋转,旋转的大转轴42就会带动轮胎一41进行旋转,旋转的轮胎一41就会带动清洗机器人进行移动,当需要清洗机器人进行转向时,通过气缸59带动移动板591进行移动,移动的移动板591就会带动移动杆57进行移动,移动的移动杆57就会带动两组旋转板54朝同一方向转动,转动的旋转板54就会带动转轴52进行转动,转动的转轴52就会带动轮胎一41进行转动,从而达到对清洗机器人进行稳定的转向。
39.以上所述,仅是本实用新型的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本实用新型加以修改或将其修改为等同的技术方案。因此,依据本实用新型的技术方案所进行的任何简单修改或等同置换,尽属于本实用新型要求保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。