1.本公开内容总体上涉及控制系统和方法,并且更具体地但不排他地,涉及用于校准车辆悬架的控制系统和方法。本发明的各方面涉及用于应用悬架校准的控制系统、包括该系统的车辆、校准车辆悬架的方法和计算机程序产品、非暂态计算机可读介质和用于实现该方法或计算机程序产品的处理器。
背景技术:
2.常规的车辆主动和半主动悬架系统首先需要在悬架系统做出相应地响应之前检测车辆干扰或道路/环境状况。在这样的情况下,通过一个或更多个传感器检测车身的运动并且控制悬架系统的动作。
3.在道路处理的情况下,可以根据当时的道路状况调整主动和半主动悬架系统,从而提高安装有它们的车辆的舒适性和平稳性。
4.然而,这些系统本质上是反应性的。因此,已经发现,当检测到干扰或道路状况时,对其进行抵消以使得在某种程度上不损害舒适性和平稳性已经为时已晚。
5.因此,本发明的实施方式的目的是提供基于车辆在车辆前方的位置处的预测的加速度的预发式(pre
‑
emptive)车辆悬架校准,该校准在车辆到达该位置之前被应用。
6.本发明的实施方式的另一目的是至少减轻现有技术的一个或更多个问题。
技术实现要素:
7.本发明的各方面和实施方式提供如所附权利要求中要求保护的控制系统、方法、车辆、计算机程序、非暂态计算机可读介质和处理器。
8.根据本发明的一方面,提供了一种用于车辆的控制系统,该控制系统包括一个或更多个控制器,该控制系统被配置成:接收指示车辆前方的路线的路线数据;根据路线数据来确定车辆在第一位置处的第一加速度的预测;根据路线数据来确定车辆在第二位置处的第二加速度的预测,其中,第二位置比第一位置更远离车辆的当前位置;根据第二加速度来确定悬架校准;接收当车辆到达第一位置时的测量的加速度数据;将测量的加速度数据与第一加速度进行比较;以及根据所确定的悬架校准和比较来输出悬架控制信号。
9.有利地,本发明使得能够根据指示车辆前方的路线的路线数据来预测车辆在车辆前方的位置处的加速度。然后,控制系统使得能够根据预测的加速度来在车辆到达车辆前方的位置之前应用所确定的悬架校准。这样的预发式悬架校准减轻了与现有技术系统在舒适性和平稳性方面的反应性质相关联的问题。
10.此外,在车辆前方的位置处的测量的加速度与预测的加速度的比较提供了验证步骤,从而使得控制系统能够验证车辆正在如根据路线数据所预计的路线上行驶。
11.该验证步骤是有利的,因为如果根据测量的加速度与预测的加速度的比较确定车辆没有在基于路线数据所预计或预期的路线上行驶,则可以确定是否应用所确定的悬架校准。
12.该一个或更多个控制器可以包括:电输入端,该电输入端被配置成接收:指示路线数据的电信号;以及指示测量的加速度数据的电信号。
13.该一个或更多个控制器可以包括:一个或更多个处理器,所述一个或更多个处理器被配置成:确定车辆在第一位置处的第一加速度的预测;确定车辆在第二位置处的第二加速度的预测,其中,第二位置比第一位置更远离车辆的当前位置;根据第二加速度来确定悬架校准;以及将测量的加速度数据与第一加速度进行比较;以及电输出端,该电输出端被配置成输出悬架控制信号。
14.电输入端可以包括无线接收器,例如以用于接收无线信号。电输出端可以包括无线发射器,例如以用于发射无线信号。
15.控制系统可以被配置成:如果测量的加速度数据和第一加速度在预定容差内,则输出悬架控制信号。
16.使用预定容差是有利的,因为它考虑了测量的加速度数据和第一加速度的不准确性。
17.控制系统可以被配置成根据路线数据来确定车辆在车辆的当前位置与第二位置之间的运动曲线。
18.运动曲线的确定是有利的,因为它提供了在当前车辆位置与第二位置之间的车辆运动的连续映射。这样的连续映射可以提供沿当前车辆位置与第二位置之间的车辆路线的点处的车辆运动的预测。
19.可以根据运动曲线来确定第一加速度的预测。
20.控制系统可以被配置成:接收在第一位置与第二位置之间的另一位置处的测量的加速度数据;根据路线数据来确定车辆在另一位置处的另一加速度的预测;将另一位置处的测量的加速度数据与另一加速度进行比较;以及根据测量的加速度和预测的加速度来输出悬架控制信号,以在车辆到达第二位置之前应用所确定的校准。
21.该另一位置可以包括在第一位置与第二位置之间的多个另一位置。
22.该一个或更多个另一位置可以基于第一位置与第二位置之间的预定时间间隔、预定时间步长或预定距离间隔或预定距离步长来确定。
23.有利地,将在一个或更多个另一位置处的测量的加速度与预测的加速度进行比较使得控制系统能够识别车辆是否在如根据路线数据所预计的路线上行驶,或者车辆是否已经偏离路线。在另一位置处的这样的比较使得控制器能够减轻“误报”的发生,即通过当确定车辆正在如根据路线数据所预计的路线的替选路线上行驶时不应用所确定的悬架校准数据来减轻“误报”的发生。
24.在实施方式中,第一位置相对于第二位置的位置可以是动态的,例如,这取决于车辆模式。第一位置相对于第二位置的位置可以根据车辆前方的路线的一个或更多个特性例如道路几何形状或地形来确定。
25.该一个或更多个另一位置的位置可以根据车辆模式来确定。该一个或更多个另一位置的位置可以根据车辆前方的路线的一个或更多个特征例如道路几何形状、道路特征和/或地形来确定。道路特征可以包括旁路、岔路或交叉路口或其中车辆可以在如根据路线数据所预计的路线的替选路线上行驶的任何其他特征。
26.有利地,这样的特征使得系统能够保持与车辆前方的路线相关。根据车辆前方的
路线的一个或更多个特征来确定一个或更多个另一位置的位置有助于减少“误报”的可能性。
27.如果测量的加速度和预测的加速度在预定容差之外,则处理装置可以被设置成确定车辆不再在根据路线数据的路线上行驶。
28.这样的特征是有利的,因为它降低了执行对车辆前方的实际路线不合适或不是最佳的悬架校准的可能性。
29.控制系统可以被配置成接收指示最大加速度值例如给定车辆模式的最大允许加速度值的最大加速度数据。
30.最大加速度值可以是用户确定的值,例如用户控制的值或用户输入的值。
31.可以根据车辆模式来选择最大加速度值。车辆模式可以是车辆的操作模式。车辆模式可以是舒适模式、运动模式或动态模式。每个车辆模式可以包括预定的最大加速度值。运动模式或动态模式下的最大加速度值可以大于舒适模式。
32.可以根据在第二位置处或在第二位置附近的主要天气状况或预测的天气状况来选择最大加速度值。
33.这样的特征是有利的,因为它基于当前位置或第二位置处的状况来对所确定的悬架校准进行优化。
34.控制系统可以被配置成:将第二加速度与最大加速度值进行比较,并且如果第二加速度超过最大加速度值,则根据最大加速度值来确定在第二位置处的悬架校准,即基于车辆在第二位置处具有最大加速度值来确定悬架校准。
35.在实施方式中,如果预测第二加速度超过最大加速度值,则根据车辆在第二位置处具有最大加速度值确定运动曲线,即处理装置被设置成考虑车辆的必要减速以使其在第二位置处具有最大加速度值。
36.如果测量的加速度数据和预测的加速度在预定容差之外,则可以保持现有的悬架校准。
37.如果在第一位置或另一位置处的测量的加速度和预测的加速度在预定容差之外,则处理装置可以被设置成确定车辆不再在预测的车辆路径上行驶。
38.控制系统可以被配置成根据车辆的当前速度和路线数据来确定第二加速度的预测。
39.在实施方式中,控制系统可以被配置成根据路线数据来预测从当前位置到第二位置的车辆路径。
40.路线数据可以包括导航数据。
41.路线数据可以指示预测的、大概的或可能的路线,例如,车辆前方的多条潜在路线之一。路线数据可以指示预编程的路线,例如在车辆的导航系统中编程的路线。
42.加速度可以是横向加速度和纵向加速度中的一个或更多个。
43.替选地,第一加速度和/或第二加速度的预测可以是车辆的第一运动值和/或第二运动值的预测,例如车辆的偏航率、侧倾率或横向速度中的一个或更多个。可以根据第二运动值确定悬架校准。接收测量的加速度数据可以包括接收测量的运动数据。
44.可选地,运动曲线包括加速和减速曲线。
45.确定悬架校准可以包括确定一个或更多个悬架特性。
46.该一个或更多个悬架特性可以包括悬架控制器增益。
47.确定该一个或更多个悬架特性可以包括确定悬架阻尼和悬架刚度中的一个或更多个。确定该一个或更多个悬架特性可以包括确定悬架力,例如由悬架系统提供的反作用力。
48.确定一个或更多个悬架特性可以有利地改善车辆的操控性。
49.在一些实施方式中,控制系统可以包括:用于车辆悬架的悬架控制器,该悬架控制器包括一个或更多个悬架致动器,该悬架控制器被配置成接收悬架校准并控制该一个或更多个悬架致动器以执行悬架校准。
50.根据本发明的另一方面,提供了一种校准车辆悬架的方法,该方法包括:根据指示车辆前方的路线的路线数据来确定车辆在第一位置处的第一加速度的预测;根据路线数据来确定车辆在第二位置处的第二加速度的预测,其中,第二位置比第一位置更远离车辆的当前位置;根据第二加速度来确定悬架校准;测量当车辆到达第一位置时车辆的加速度;将在第一位置处的测量的加速度与第一加速度进行比较;以及根据所确定的悬架校准和所述比较来输出悬架控制信号。
51.可选地,该方法可以包括:如果测量的加速度数据和第一加速度在预定容差内,则输出悬架控制信号。
52.在实施方式中,该方法可以包括根据路线数据来确定车辆在车辆的当前位置与第二位置之间的运动曲线。
53.可选地,该方法可以包括根据运动曲线来确定第一加速度的预测。
54.该方法可以包括:根据指示车辆前方的路线的路线数据来确定车辆在第一位置与第二位置之间的另一位置处的另一加速度的预测;测量当车辆到达另一位置时车辆的加速度;将在另一位置处的测量的加速度数据与另一加速度进行比较;以及根据所确定的悬架校准和所述比较来输出悬架控制信号。
55.可选地,该方法可以包括:如果测量的加速度数据和另一加速度在预定容差内,则输出悬架控制信号。
56.该方法可以包括将第二加速度与最大加速度值进行比较。
57.该方法可以包括:如果第二加速度超过最大加速度值,则根据最大加速度值来确定在第二位置处的悬架校准。
58.该方法可以包括:如果预测第二加速度超过最大加速度值,则根据车辆在第二位置处具有最大加速度值来确定运动曲线。
59.在实施方式中,该方法包括:如果测量的加速度数据和预测的加速度在预定容差之外,则保持现有的悬架校准。
60.该方法可以包括根据车辆的当前速度和路线数据来确定第二加速度的预测。
61.该方法可以包括根据路线数据来预测从车辆的当前位置到第二位置的车辆路径。
62.路线数据可以包括导航数据。
63.加速度可以是横向加速度和纵向加速度中的一个或更多个。
64.运动曲线可以包括加速和减速曲线。
65.该方法可以包括:在确定悬架校准时,确定一个或更多个悬架特性。
66.该一个或更多个悬架特性可以包括悬架控制器增益。
67.该方法可以包括:在确定该一个或更多个悬架特性时,确定悬架阻尼和悬架刚度中的一个或更多个。
68.根据本发明的一方面,提供了一种车辆,该车辆包括如上面所描述的或被设置成执行如上面所描述的方法的控制系统。
69.根据本发明的又一方面,提供了一种计算机程序产品,该计算机程序产品能够在处理器上执行以执行上面所描述的方法。
70.根据本发明的另一方面,提供了一种携带计算机可读代码的非暂态计算机可读介质,该计算机可读代码在被执行时使车辆执行上面所描述的方法。
71.根据本发明的又一方面,提供了一种处理器,该处理器被设置成执行上面所描述的方法或上面所描述的计算机程序产品。
72.在本技术的范围内,明确地指出:前述段落、权利要求和/或以下描述和附图中阐述的各个方面、实施方式、示例和替选方案,特别是其各个特征,可以被独立地采用或以任意组合被采用。即,除非这些特征不兼容,否则所有实施方式和/或任何实施方式的特征可以以任意方式和/或组合进行组合。为免生疑问,本文使用的术语“可以”、“和/或”、“例如”、“如”和任何类似的术语应被解释为非限制性的,使得如此描述的任何特征不需要出现。实际上,在不脱离本发明的范围的情况下,明确设想了可选特征的任意组合,无论这些是否明确要求保护。申请人保留更改任何原始提交的权利要求或相应地提交任何新的权利要求的权利,包括修改任意原始提交的权利要求以引用和/或并入任何其他权利要求中的任何特征的权利,尽管最初并没有以该方式要求保护。
附图说明
73.现在将仅参照附图通过示例的方式描述本发明的实施方式,在附图中:
74.图1是用于校准车辆悬架的控制系统的示意图;
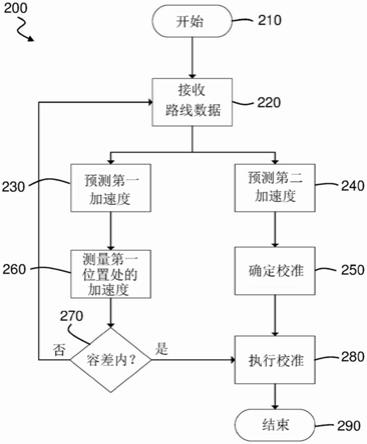
75.图2是示出根据本发明的实施方式的校准车辆悬架系统的方法的流程图;
76.图3是示意性地示出根据本发明的实施方式的车辆和计划轨迹的平面图;
77.图4是根据本发明的实施方式的运动曲线图;
78.图5是示出根据本发明的另一实施方式的校准车辆悬架系统的方法的流程图;
79.图6是示意性地示出根据本发明的另一实施方式的车辆和计划轨迹的平面图;
80.图7是根据本发明的实施方式的运动曲线图;以及
81.图8是根据本发明的实施方式的车辆。
具体实施方式
82.现在参照图1,示出了根据本发明的实施方式的用于校准车辆悬架150的控制系统100的示意性系统图。控制系统100包括控制器120的电输入端122,该电输入端122在使用时接收电信号110。电输入端122可以是到控制器120的输入装置的电引脚连接的形式,控制器120可以包括用于接收电信号110的一个或更多个电装置。控制器120具有处理器130和用于在其中存储数据的存储器135。处理器是用于执行计算机可读指令的电子处理器。处理器130被配置成访问存储器135以执行存储在其中的计算机可读指令。存储器135还可以用来存储数据以供处理器130对其进行操作。
83.电信号110指示或表示路线数据,例如指示车辆800前方的路线或前方的可导航路径,如图8所示,即车辆800是在其内安装或实现有控制系统100的车辆800。在本实施方式中,可以从车辆的导航系统接收路线数据。电信号还可以指示或表示测量的加速度数据。从可以与车辆800相关联的一个或更多个感测装置收集或接收测量的加速度数据。所述一个或更多个感测装置被设置成确定车辆800的一个或更多个加速度并且可以包括一个或更多个感测装置,所述一个或更多个感测装置在本实施方式中可以是一个或更多个加速度计的形式。存储器135被设置成存储由电信号110呈现的路线数据和/或测量的加速度数据。存储器135还可以存储与控制系统100有关的信息和参数。
84.处理器130被设置成处理电信号110并且在输出装置123处产生输出信号121,该输出装置123可以是控制器120的电输出端123,控制器120可以包括用于输出电信号121的一个或更多个电装置。在本实施方式中,输出信号121由车辆悬架150的悬架控制器140的电输入端141接收。
85.在本实施方式中,输出信号121提供悬架控制信号。悬架控制信号被设置成实现由处理器130确定的悬架校准。在悬架控制器140的电输入端141处接收来自控制器120的输出信号121。悬架控制器140被设置成根据在输入141处接收到的信号来校准或调整车辆悬架150。车辆悬架150的校准影响或调整车辆800通过车轮800所经历的动态。
86.现在参照图2,示出了根据本发明的实施方式的控制系统100的操作方法200。在本实施方式中,方法200可以由控制系统100来实现。
87.方法200开始于210处,在210中,在本实施方式中车辆沿导航路径或路线行驶。方法200然后进行到步骤220,在步骤220中如上所述由控制器120经由电输入端110接收路线数据。
88.路线数据指示车辆800前方的路线或前方的导航路径。特别地,路线数据指示或表示车辆前方的路线的几何形状,例如车辆800前方的路线的道路曲率、弯折和/或弯曲。
89.还设想路线数据可以指示或表示车辆800前方的路线的地形。车辆800前方的路线可以是预测路线、预期路线或预编程路线,例如在车辆800的导航系统中编程的路线。
90.在步骤230处,处理器130基于路线数据来确定车辆800在车辆800前方的第一位置处的第一加速度。第一加速度可以是车辆800的横向加速度和/或纵向加速度。在本实施方式中,第一加速度的确定是基于路线数据即车辆800前方的编程、预测或预期的路线的预测。
91.第一加速度可以基于路线数据结合当前车辆速度和/或位置以及当前车辆位置与第一位置之间的例如编程、预测或预期的路线来确定。
92.与在步骤230处确定第一位置处的第一加速度并行地即同时地,处理器130在步骤240处根据路线数据来确定车辆800在车辆800前方的第二位置处的第二加速度。
93.还设想,分开进行即相继地进行在第一位置处的第一加速度的确定和在第二位置处的第二加速度的确定。
94.在本实施方式中,第二位置比第一位置更远离车辆800的当前位置。以与第一加速度的预测相同的方式实现或达成在第二位置处的第二加速度的预测或预期。另外地,第二加速度具有与第一加速度相同的类型,即车辆800的横向加速度和/或纵向加速度。
95.在步骤250处,处理器130根据第二加速度来确定悬架校准。在本实施方式中,可以
根据车辆模式即车辆的操作模式来确定第二位置处的悬架校准,以使车辆当其抵达或到达第二位置时的平稳性和舒适性优化。
96.尽管设想可以确定影响车辆平稳性和舒适性的任何其他合适的悬架参数,但是在本实施方式中悬架校准是悬架刚度和/或悬架阻尼。根据第二加速度来确定悬架校准,使得在车辆800抵达或到达第二位置之前,可以执行所确定的悬架校准。
97.通过车辆从接收到路线数据的位置继续沿其路线行进,方法200继续,并且当车辆抵达或到达第一位置时,根据步骤260,测量车辆在该点处或在该点附近的加速度。加速度由一个或更多个感测装置特别地在本实施方式中由一个或更多个加速度计测量,以产生由电信号110表示的测量的加速度数据。测量的加速度数据存储在存储器135中。
98.在步骤270处,将测量的加速度数据与第一加速度进行比较,并且由处理器130确定它们是否在彼此的预定容差内。设想预定容差将考虑测量误差和预测误差例如第一加速度的预测误差。
99.如果测量的加速度数据和第一加速度在预定容差内,则处理器130确定车辆800正在如由路线数据指示或表示的路线上行驶。因此,该比较为控制系统100提供了验证步骤,使得仅当车辆在如由路线数据指示或表示的路线上行驶时才执行所确定的悬架校准。
100.如果在步骤270处确定测量的加速度数据和第一加速度在预定容差内,则在步骤280处,控制器120在电输出端123处向悬架控制器140发送悬架控制信号,以在车辆800到达第二位置之前例如距第二位置预定距离执行所确定的悬架校准(在步骤250处所确定的)。
101.控制器120可以被设置成当车辆800距第二位置预定距离时输出悬架控制信号。然而,还设想其中控制器120被设置成输出悬架控制信号的距第二位置的距离可以取决于在第二位置处的路线的一个或更多个特性,例如,如由路线数据指示或表示的曲率、弯折和/或弯曲。
102.如果在步骤270处确定测量的加速度数据和第一加速度在预定容差之外或超出预定容差,则处理器130可以被设置成确定车辆800没有或不再在如由路线数据指示或表示的路线上行驶。在本实施方式中,方法200返回到其中接收指示或表示车辆800前方的路线的路线数据的步骤220。此外,在比较步骤270时或在比较步骤270之前的悬架校准可以保持不变。
103.现在参照图3,示出了具有在其前方延伸的轨迹310的车辆800的示意图。轨迹310由根据上面的方法200的步骤220的路线数据表示或指示。在本实施方式中,轨迹310指示或表示车辆800前方的路线即编程、预测或预期的路线,并且根据路线数据来确定轨迹310。
104.在实施方式中,编程的路线可以是编程到车辆800的导航系统中的路线。
105.如方法200的步骤230中所描述的,控制系统100确定车辆800在车辆800前方的第一位置320处的第一加速度。第一位置320位于轨迹310上或沿轨迹310定位,例如位于由路线数据表示的路线上。
106.根据方法200的步骤240,控制系统100还确定车辆800在车辆800前方的第二位置330处的第二加速度。第二位置330也位于轨迹310上或沿轨迹310定位,比第一位置320更远离车辆800的当前位置。与第一位置320一样,第二位置330也位于由路线数据表示的路线上。
107.如方法200中所描述的,在第一位置320处测量车辆800的实际加速度以产生测量
的加速度数据。将测量的加速度数据与第一加速度进行比较。该验证步骤使得控制系统100能够确定车辆800实际上如由轨迹310预测或表示的那样行驶。如果确定车辆800正在根据轨迹310行驶,则控制系统100被设置成在车辆800到达第二位置330之前执行所确定的悬架校准(例如,在方法200的步骤250处所确定的)。
108.图3还示出了其中车辆800在与由路线数据指示或表示的路线不同的替选轨迹路线或路径340即不同于轨迹310的轨迹上行驶的情况。如果车辆在替选轨迹340上行驶,则在第一替选位置350处的测量的加速度数据与第一加速度将不匹配或者不在第一加速度的预定容差内。应用方法300的控制系统100将确定车辆800没有根据轨迹310行驶,并且因此将不执行所确定的悬架校准。
109.在实施方式中,第一位置320与第二位置330之间的距离可以是可调整的,例如可以根据轨迹310即轨迹310的性质进行调整。
110.现在参照图4,示出了根据本发明的实施方式的运动曲线400。在方法200的其中接收路线数据的步骤220之后,处理器130可以确定运动曲线400。在本实施方式中,运动曲线400是加速和减速曲线。
111.运动曲线400以图形方式示出了车辆800沿如由路线数据表示的导航路径的预测或预期的加速和减速410。在本实施方式中,水平轴420表示沿路线的距离,而垂直轴430示出车辆800在沿路线的每个点处的加速度。车辆800的加速度可以是纵向加速度、横向加速度或垂直加速度、或它们的任意组合。
112.在运动曲线400上示出了沿路线在其各自位置处的第一位置320和第二位置330。运动曲线400的创建使得在车辆800沿路线行驶时能够连续监测车辆加速度。
113.在本实施方式中,鉴于运动曲线400,预计车辆800在沿路线的点d即第一位置320处的加速度将为a。该值由应用阈值440描述,其中控制系统100特别是处理器130确定车辆800正在如由路线数据表示的路线上行驶。控制器120被设置成在电输出端123处输出悬架控制信号,以在车辆800到达第二位置330之前将所确定的悬架校准应用于车辆悬架150。
114.激活点即应用悬架校准的点由触发阈值450表示。
115.现在参照图5,示出了根据本发明的另一实施方式的控制系统100的操作方法。在本实施方式中,方法500可以由控制系统100实现。
116.方法500的步骤510、520、530、540、550、560和570等同于方法200的步骤210、220、230、240、250、260和270,并且因此,为了简明起见,将不再描述。
117.方法500与方法200的不同之处在于,在步骤580处,处理器130根据路线数据来确定车辆在车辆800前方的另一位置处的另一加速度。在本实施方式中,另一加速度具有与第一加速度和第二加速度相同的类型,即横向加速度、纵向加速度、垂直加速度或它们的任意组合。
118.在本实施方式中,处理器130与第一加速度和第二加速度的确定并行地即同时地确定另一加速度。
119.还设想分开进行即相继地或在彼此不同的时间进行第一加速度、第二加速度和另一加速度的确定。
120.另一位置在第一位置与第二位置之间。另一加速度的确定以与第一加速度和第二加速度的确定相同的方式实现。
121.在步骤570处,以与方法200的步骤270相同的方式将第一加速度与第一位置处的测量的加速度数据进行比较。如果第一加速度和测量的加速度数据在预定容差内,则应用方法500的控制系统100初始或初步确定车辆800正在如由路线数据表示的路线上行驶。
122.车辆800沿其路线或可导航路径继续行驶,直到它到达另一位置。在步骤581处,测量车辆在另一位置处或在另一位置附近的另一加速度。根据方法200使用一个或更多个感测装置测量加速度。
123.在步骤582处,将测量的加速度数据与另一加速度进行比较,并且例如由处理器130确定它们是否在彼此的预定容差内。如在方法200中,预定容差将考虑测量误差和另一位置处的加速度预测的误差。
124.如果确定测量的加速度数据和另一加速度在预定容差内,则处理器130确定车辆正在如由路线数据表示或指示的路线上行驶。
125.如果确定测量的加速度数据和另一加速度在预定容差内,则控制器120从电输出端123向悬架控制器140发送悬架控制信号,以在车辆800到达第二位置之前在悬架150处执行所确定的悬架校准。
126.因此,在本实施方式中,步骤580、581和582一起提供了针对方法200的额外验证步骤。该额外验证步骤有助于减轻误报,例如,其中当实际上车辆采取替选路线时控制系统100错误地确定车辆800正在如由路线数据指示的行驶的情况。在这样的情况下,所确定的悬架校准可能不是实际车辆路线的最佳校准。为了执行所确定的悬架校准,在第一位置和另一位置两者处的测量的加速度数据和加速度必须在预定容差内。
127.如果在步骤582处确定测量的加速度数据和另一加速度在预定容差之外或超出预定容差,则处理器130被设置成确定车辆800没有或不再在根据路线数据的路线上行驶。在本实施方式中,方法500返回到其中接收指示或表示车辆800前方的路线的路线数据的步骤520。此外,在比较步骤582时或在比较步骤582之前的悬架校准保持不变。
128.尽管描述了单个另一位置,但是这不必是这种情况。设想可以确定加速度,并且随后在第一位置与第二位置之间的多个另一位置处进行测量。这将为控制系统100创建多个验证步骤,以确定或验证车辆800正在如由路线数据表示的路线上行驶。
129.在实施方式中,可以根据如由路线数据指示的车辆800前方的路线例如前方道路的几何形状、弯道和/或曲率来确定另一位置。在一些实施方式中,可以根据前方路线的一个或更多个特征例如旁路、支路、岔路或交叉路口或将使车辆800能够从根据路线数据的路线调整其路线的任何其他特征来确定另一位置。
130.现在参照图6,示出了具有在其前方延伸的轨迹610的车辆800的示意图,轨迹610类似于图3中描述的轨迹310。轨迹610由根据上面的方法500的步骤520的路线数据表示。在本实施方式中,轨迹610指示车辆800前方的路线,并且根据路线数据来确定轨迹610。
131.在实施方式中,轨迹610可以由编程的路线例如编程到车辆800的导航系统中的路线来限定。
132.如方法500中所描述的,根据步骤530,控制系统100确定车辆800在车辆800前方的第一位置620处的第一加速度。第一位置620位于轨迹610上或沿轨迹610定位。
133.控制系统100还确定在车辆800前方的两个另一位置640、650处的另一加速度。两个另一位置即第一另一位置640和第二另一位置650位于第一位置620与第二位置630之间。
两个另一位置640、650和第二位置630都位于轨迹610上或沿轨迹610定位。
134.根据方法500的步骤540,控制系统100还确定第二位置630处的第二加速度。第二位置630比第一位置620和两个另一位置640、650更远离车辆800的当前位置。
135.如上面的方法500中所描述的,将在第一位置620处的测量的加速度数据与第一加速度进行比较。该步骤使得控制系统100能够初始确定车辆800实际上正在根据轨迹610行驶,并且因此如由路线数据表示的行驶。
136.在本实施方式中,当车辆800到达第一另一位置640时测量车辆800的实际加速度,以产生测量的加速度数据。根据上面的步骤582,将测量的加速度数据与第一另一加速度进行比较。如果确定第一另一位置和测量的位置在预定容差内,则确定车辆800仍在根据轨迹610行驶并因此仍在如由路线数据表示的路线上行驶。这提供了验证步骤。
137.如果测量的加速度数据和第一另一加速度在预定容差内,则当车辆800到达第二另一位置650时测量车辆800的实际加速度,以产生测量的加速度数据。将测量的加速度数据与第二另一加速度进行比较。如果确定第二另一加速度和测量的加速度在预定容差内,则确定车辆800仍在根据轨迹610行驶。这提供了车辆800仍在根据轨迹610行驶并因此仍在由轨迹610表示的路线上行驶的另外验证步骤。
138.如果在上述另外验证步骤之后确定车辆800正在根据轨迹610行驶,则控制系统100被设置成在车辆800到达第二位置630之前执行所确定的悬架校准。
139.图6还示出了其中车辆800在与由路线数据表示的轨迹不同的替选轨迹660即不同于轨迹610的轨迹上行驶的情况。在这样的情况下,控制系统100将在第一位置620和第一另一位置640两者处确定车辆800正在根据轨迹610行驶。
140.然而,在这种情况下,车辆800采取替选轨迹660,从而偏离第一另一位置640与第二另一位置650之间的轨迹610。
141.因此,在替选位置670处的测量的加速度数据将与第二另一加速度不匹配或不在第二另一加速度的预定容差内。应用方法500的控制系统100将确定车辆800没有根据轨迹610行驶并且将不执行所确定的悬架校准。
142.基于第二另一加速度的另外验证步骤降低了误报的可能性,即降低了当车辆800将不到达第二位置630时控制系统100执行所确定的悬架校准的可能性。
143.现在参照图7,示出了根据本发明的实施方式的运动曲线700。在方法500中,在接收路线数据(步骤520)之后,处理器130可以确定运动曲线700。在本实施方式中,运动曲线700是加速和减速曲线。
144.运动曲线700与运动曲线400相同,但是应用于方法500。相似的特征由以
‘
700’而不是
‘
400’开头的相似附图标记表示,并且为了简明起见,将不再进一步讨论。
145.在运动曲线700上示出了沿路线在其各自位置处的第一位置620、第二位置630、第一另一位置640和第二另一位置650。运动曲线700的创建使得在车辆800沿路线行驶时能够连续监测加速度。
146.运动曲线700示出了车辆800采取由路线数据表示的路线的替选路线的效果。在第一另一位置640与第二另外位置650之间,车辆800如加速和减速曲线760所示调整其路线。
147.图7还示出了其中车辆800沿根据路线数据的路线行驶的替选情况。在这样的情况下,如果第一加速度、第一另一加速度和第二另一加速度中的每一个和在这些位置中的每
一个处的测量的加速度数据在预定容差内,则在应用阈值740处确定车辆800正在如由路线数据表示的路线上行驶,并且因此,控制系统100被设置成在车辆800到达第二位置630之前应用所确定的悬架校准。激活点由触发阈值750限定。
148.本领域技术人员还将理解,前述特征和/或附图中所示特征的任意数目的组合提供了比现有技术明显的优点,并且因此在本文描述的本发明的范围内。
149.本说明书(包括任意所附权利要求、摘要和附图)中公开的所有特征和/或如此公开的任何方法或过程的所有步骤可以以任意组合进行组合,除了其中这样的特征和/或步骤中的至少一些是相互排斥的组合之外。
150.除非另有明确说明,否则本说明书(包括任意所附权利要求、摘要和附图)中公开的每个特征可以被用作相同、等同或类似目的的替选特征替换。因此,除非另有明确说明,否则所公开的每个特征仅是等效或相似特征的一般系列的一个示例。
151.本发明不限于任何前述实施方式的细节。本发明扩展到本说明书(包括任意所附权利要求、摘要和附图)中公开的特征的任意新颖的一个或任意新颖的组合,或者扩展到如此公开的任意方法或过程的步骤的任意新颖的一个或任意新颖的组合。不应将权利要求解释为仅涵盖前述实施方式,而是涵盖落入权利要求的范围内的任何实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。