1.本技术属于机器人技术领域,更具体地说,是涉及一种小型底盘及机器人。
背景技术:
2.随着人工智能技术的发展,机器人代替人工逐渐成了现今社会中商业、生活的一种趋势。目前餐厅、快餐店等餐饮场所的配餐方式主要有两种,一种是用餐者自取,另一种是服务员配送,其中,第一种方式虽然节省人工成本,但是取餐秩序容易混乱,影响用餐者的用餐体验,第二种方式虽然提高了服务质量,但是增加了人工成本。然而配餐不像生产加工是机械重复性作业,需要针对每位用餐者进行精确配送,机械化难度大,在这种情况下,送餐机器人应运而生,它不仅可以代替人工进行送餐,而且避免了交叉感染,有利于提高食品卫生质量。
3.现有的送餐机器人一般配置六轮的移动底盘,六轮的移动底盘中的驱动轮和从动轮会占用底板的内部空间,造成六轮的移动底盘的体积较大,通常需要宽度在0.7米以上的通道才能顺利通过,导致其难以适用于快餐店、茶餐厅等人流比较密集、通道较窄的场所。
技术实现要素:
4.本技术的目的在于提供一种小型底盘及机器人,包括但不限于解决现有六轮的移动底盘体积较大的技术问题。
5.为实现上述目的,本技术采用的技术方案是一种小型底盘,其包括:
6.底板;
7.驱动轮,位于所述底板的第一端部;
8.从动轮,相对于所述驱动轮安装于所述底板的第二端部;以及
9.减震悬架,设于所述底板的两侧部,所述减震悬架包括第一连接段和第二连接段,所述第一连接段和所述第二连接段分别铰接于所述底板,且所述第一连接段从所述底板的侧部向所述底板第一端部的内部弯折以供安装连接所述驱动轮,所述第二连接段从上向下弯折以供安装连接所述从动轮,进而位于所述底板两侧的所述减震悬架围合形成所述底板的中心安装区域。
10.在一个实施例中,所述减震悬架还包括:
11.安装座,呈卡槽状且安装于所述底板上,弯折的所述第一连接段和弯折的所述第二连接段分别卡设铰接于所述安装座的两端。
12.在一个实施例中,所述第一连接段和所述第二连接段分别通过旋转阻尼与所述安装座的两端转动连接。
13.在一个实施例中,所述安装座上设有卡板,所述卡板的两端分别卡接于所述第一连接段的铰接处和所述第二连接段的铰接处进而卡紧所述旋转阻尼。
14.在一个实施例中,所述减震悬架还包括:
15.弹性减震器,跨设于所述安装座之上,所述弹性减震器的两端分别与所述第一连
接段和所述第二连接段转动连接。
16.在一个实施例中,所述减震悬架还包括:
17.阻尼杆,跨设于所述安装座之上,所述阻尼杆的两端分别转动连接于所述安装座和所述第一连接段上。
18.在一个实施例中,所述小型底盘还包括:
19.弹性牵拉件,所述弹性牵拉件的两端分别牵拉连接所述减震悬架与所述底板的第一端部。
20.在一个实施例中,所述第一连接段包括第一l形连杆和第二l形连杆,所述第一l形连杆从所述底板的侧部向所述底板的第一端部弯折,所述第二l形连杆从所述底板第一端部的外侧向内侧弯折,所述第一l形连杆的位于所述底板侧部的一端与所述安装座转动连接,所述第一l形连杆的位于所述底板第一端部的一端与所述第二l形连杆的外端紧固连接,所述第二l形连杆的内端与所述驱动轮安装连接。
21.在一个实施例中,所述第二连接段包括第三l形连杆,所述第三l形连杆从上向下弯折,所述第三l形连杆的底端与所述从动轮安装连接,所述第三l形连杆的拐角部与所述安装座转动连接。
22.本技术还提供了一种机器人,包括上述的小型底盘。
23.本技术提供的小型底盘及机器人的有益效果在于:通过从底板的侧部向底板第一端部的内部弯折的第一连接段将驱动轮安装连接在底板上,以及通过从上向下弯折的第二连接段将从动轮安装连接在底板上,使得驱动轮和从动轮能够尽量靠近底板的边缘设置,不用占用底板的内部空间,使得底板的内部有足够的空间放置电池等组件,而无需额外增加容置空间,从而有效地解决了现有六轮的移动底盘体积较大的技术问题,有利于提升小型底盘的适应性,使得机器人可以适用在通道较窄的场所里。
附图说明
24.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
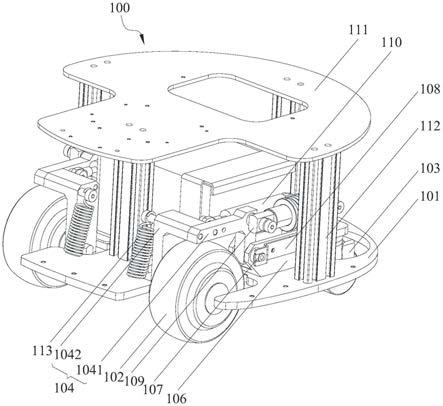
25.图1是本技术实施例提供的小型底盘的立体示意图;
26.图2是本技术实施例提供的小型底盘的主视示意图;
27.图3是本技术实施例提供的小型底盘的右视示意图;
28.图4是图3中i
‑
i方向的剖面示意图;
29.图5是本技术实施例提供的机器人盘的右视示意图。
30.图中各附图标记为:
31.1—机器人、100—小型底盘、200—机身支架;
32.101—底板、102—驱动轮、103—从动轮、104—第一连接段、105—第二连接段、106—安装座、107—旋转阻尼、108—卡板、109—弹性减震器、110—阻尼杆、111—顶板、112—支撑杆、113—弹性牵拉件、1010—底板的中线、1011—第一避让位、1012—第二避让位、1041—第一l形连杆、1042—第二l形连杆。
具体实施方式
33.为了使本技术所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
34.需说明的是:当部件被称为“固定在”或“设置在”另一个部件,它可以直接在另一个部件上或者间接在该另一个部件上。当一个部件被称为是“连接在”另一个部件,它可以是直接或者间接连接至该另一个部件上。当一个部件被称为与另一个部件“电连接”,它可以是导体电连接,或者是无线电连接,还可以是其它各种能够传输电信号的连接方式。术语“长度”、“宽度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本专利的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本技术的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
35.本技术首先提出一个小型底盘实施保护方案:
36.请一并参阅图1至图4,本技术提供的小型底盘100包括底板101、驱动轮102、从动轮103和减震悬架;其中,驱动轮102位于底板101的第一端部上;从动轮103相对于驱动轮102安装在底板101的第二端部上,减震悬架设置在底板101的两个侧部上,并且减震悬架包括第一连接段104和第二连接段105,第一连接段104和第二连接段105分别铰接在底板101上,其中第一连接段104从底板101的侧部向底板101第一端部的内部弯折以供安装连接驱动轮102,第二连接段105从上向下弯折以供安装连接从动轮103,进而使位于底板101两侧的减震悬架围合形成底板101的中心安装区域。
37.具体地,在底板101上开设有第一避让位1011和第二避让位1012,第一避让位1011开设在底板101的第一端部的边缘上,第二避让位1012开设在底板101的第二端部的边缘上,驱动轮102容置在第一避让位1011内,从动轮103容置在第二避让位1012内,使得驱动轮102和从动轮103容置在底板101的覆盖范围内,避免了驱动轮102和从动轮103额外占用底板101的外侧空间导致小型底盘100的体积增大,从而使小型底盘100的结构更加紧凑,有利于缩小小型底盘100的体积;驱动轮102为具有轮毂电机的车轮;从动轮103为万向轮,可绕竖向延伸的转轴作360度转动;第一连接段104的与驱动轮102安装连接的一端从第一连接段104的与底板101安装连接的一端向上向前向内再向下延伸,使得第一连接段104向小型底盘100的内部弯折形成的夹角的开口朝向小型底盘100的内部,并且该夹角为等于或大于90度且小于180度,从而可以给小型底盘100的中部让出更多空间。
38.本技术实施例提供的小型底盘100,通过从底板101的侧部向底板101第一端部的内部弯折的第一连接段104将驱动轮102安装连接在底板101上,以及通过从上向下弯折的第二连接段105将从动轮103安装连接在底板101上,使得驱动轮102和从动轮103能够尽量靠近底板101的边缘设置,不用占用底板101的内部空间,使得底板101的内部有足够的空间放置电池等组件,而无需额外增加容置空间,从而有效地解决了现有六轮的移动底盘体积
较大的技术问题,有利于提升小型底盘100的适应性,使得小型底盘100可以适用在通道较窄的场所里。
39.可选地,请参阅图1、图3和图4,作为本技术提供的小型底盘的一个具体实施例,减震悬架还包括安装座106,安装座106呈卡槽状,并且安装在底板101上,弯折的第一连接段104和弯折的第二连接段105分别卡设铰接在安装座106的两端。具体地,在安装座106的顶部开设有通槽,该通槽贯通安装座106的两端,弯折的第一连接段104的一个端部伸入该通槽内后铰接在安装座106的靠近底板101第一端部的端部上,弯折的第二连接段105的拐角部伸入该通槽内后铰接在安装座106的靠近底板101第二端部的端部上,即第一连接段104的一端和第二连接段105的一端分别夹设在通槽内,有利于提升第一连接段104和第二连接段105与安装座106连接的可靠性和稳定性。
40.可选地,请参阅图1、图3和图4,作为本技术提供的小型底盘的一个具体实施例,第一连接段104和第二连接段105分别通过旋转阻尼107与安装座106的两端转动连接。具体地,第一连接段104的一个端部通过旋转阻尼107转动连接在安装座106的靠近底板101第一端部的端部上,第二连接段105的拐角部通过另一个旋转阻尼107转动连接在安装座106的靠近底板101第二端部的端部上,从而通过两个旋转阻尼107可以分别对第一连接段104和第二连接段105形成阻尼效果,有利于控制第一连接段104和第二连接段105的摆动幅度,使得驱动轮102和从动轮103在运动过程中更加平稳。
41.可选地,请参阅图1和图3,作为本技术提供的小型底盘的一个具体实施例,在安装座106上设置有卡板108,卡板108的两端分别卡接在第一连接段104的铰接处和第二连接段105的铰接处,进而卡紧旋转阻尼107。具体地,卡板108的中部紧固连接在安装座106的外壁上,并且卡板108的两端分别开设有卡口,分别伸入安装座106的两个端部并与第一连接段104和第二连接段105安装连接的两个旋转阻尼107的端部分别伸入卡板108的两个卡口内与卡板108卡接,从而使两个旋转阻尼107卡紧在安装座106的两个端部上,并且对第一连接段104和第二连接段105形成阻尼效果。
42.可选地,请参阅图1至图4,作为本技术提供的小型底盘的一个具体实施例,减震悬架还包括弹性减震器109,弹性减震器109跨设在安装座106的上方,并且弹性减震器109的两端分别与第一连接段104和第二连接段105转动连接。具体地,弹性减震器109可以是弹簧缓冲器或胶泥缓冲器等,弹性减震器109的一端转动连接在第一连接段104的位于其两端之间的本体上,弹性减震器109的另一端转动连接在第二连接段105的顶端部上;当驱动轮102和从动轮103在运动过程中发生上下振动时,第一连接段104和第二连接段105会分别绕两个旋转阻尼107的转轴作前后摆动,以压缩或拉伸弹性减震器109,此时,弹性减震器109可以通过自身的弹性变形将动能转化为变形能,从而缓冲驱动轮102和从动轮103的振动,使得小型底盘100在运动过程中更加平稳。
43.可选地,请参阅图1和图4,作为本技术提供的小型底盘的一个具体实施例,减震悬架还包括阻尼杆110,阻尼杆110跨设在安装座106的上方,阻尼杆110的两端分别转动连接在安装座106和第一连接段104上。具体地,阻尼杆110和弹性减震器109分别转动连接在第一连接段104的内外两侧,从而可以避免在第一连接段104的运动过程中阻尼杆110与弹性减震器109发生干涉;在本实施例中,安装座106的靠近第二连接段105的位置处设置有沿竖向延伸的支撑件,阻尼杆110的两端分别与支撑件的顶端和第二连接段105的本体转动连
接,从而可以对驱动轮102进行压力补偿,即在小型底盘100的载荷不同时,可以通过阻尼杆110自动调节驱动轮102的轮压,在保证足够驱动力的情况下,使驱动轮102获得更好的操纵性。
44.可选地,请参阅图1、图2、图4和图5,作为本技术提供的小型底盘的一个具体实施例,小型底盘100还包括弹性牵拉件113,弹性牵拉件113的两端分别牵拉连接减震悬架和底板101的第一端部。具体地,弹性牵拉件113可以是拉簧等,沿竖向设置,弹性牵拉件113的顶端与第一连接段104的本体紧固连接,弹性牵拉件113的底端与底板101的第一端部紧固连接,从而通过弹性牵拉件113可以对底板101的第一端部进行牵引,防止当底板101的第二端部翘起时底板101的第一端部下沉过于严重。
45.可选地,请参阅图1和图4,作为本技术提供的小型底盘的一个具体实施例,第一连接段104包括第一l形连杆1041和第二l形连杆1042,其中,第一l形连杆1041从底板101的侧部向底板101的第一端部弯折,第二l形连杆1042从底板101的第一端部的外侧向内侧弯折,第一l形连杆1041的位于底板101的侧部的一端与安装座106转动连接,第一l形连杆1041的位于底板101的第一端部的一端与第二l形连杆1042的外端紧固连接,第二l形连杆1042的内端与驱动轮102安装连接。具体地,第一l形连杆1041包括第一竖向连接臂和第一水平连接臂,其中,第一水平连接臂与第一竖向连接臂垂直设置,并且第一水平连接臂的一端与第一竖向连接臂的顶端一体成型,第一竖向连接臂的底端转动连接在安装座106的端部上,第一水平连接臂朝底板101的第一端部的方向水平延伸;第二l形连杆1042包括第二竖向连接臂和第二水平连接臂,其中,第二水平连接臂与第二竖向连接臂垂直设置,第二水平连接臂从底板101的外侧向内侧水平延伸,并且跨设在驱动轮102的上方,第二水平连接臂的外端与第一水平连接臂的远离第一竖向连接臂的一端紧固连接,并且相交形成夹角,该夹角为等于或大于90度且小于180度,第二水平连接臂的内端与第二竖向连接臂的顶端一体成型,第二竖向连接臂的底端与驱动轮102安装连接。通过第一l形连杆1041和第二l形连杆1042组成的弯折的第一连接段104可以使驱动轮102靠近底板101的第一端部的边缘安装,从而给小型底盘100的中部让出更多空间。
46.可选地,请参阅图3,作为本技术提供的小型底盘的一个具体实施例,第二连接段105包括第三l形连杆,第三l形连杆从上向下弯折,并且第三l形连杆的底端与从动轮103安装连接,第三l形连杆的拐角部与安装座106转动连接。具体地,第三l形连杆包括第三竖向连接臂和第三水平连接臂,其中,第三水平连接臂与第三竖向连接臂垂直设置,并且第三水平连接臂的一端与从动轮103安装连接,第三水平连接臂的另一端与第三竖向连接臂的底端一体成型,并且共同形成第二连接段105的拐角部,第二连接段105的拐角部与安装座106转动连接,第三竖向连接臂的顶端朝安装座106的上方延伸并且与弹性减震器109转动连接,从而可以使弹性减震器109沿水平方向安装,使得从动轮103可以在上下振动过程中驱使第二连接段105的与弹性减震器109转动连接的一端绕旋转阻尼107的转轴转动,并且压缩或拉伸弹性减震器109。
47.本技术同时提出一个对于底盘优选集合的实施保护方案:
48.可选地,请参阅图1至图4,作为本技术提供的小型底盘的一个具体实施例,小型底盘100包括底板101、两个驱动轮102、两个从动轮103、两个减震悬架和两个弹性牵拉件113;其中,在底板101上开设有两个第一避让位1011和两个第二避让位1012,两个驱动轮102分
别容置在两个第一避让位1011内,并且两个驱动轮102对称设置在底板中线1010的左右两侧,从而使小型底盘100第一端部的左右两侧获得的驱动力更加均匀,有利于提升小型底盘100在运动过程中的稳定性,驱动轮102为具有轮毂电机的车轮,有利于减少驱动轮102的占用空间,而两个从动轮103分别容置在两个第二避让位1012内,并且两个从动轮103对称设置在底板中线1010的左右两侧,并且与两个驱动轮102相对设置,从而使小型底盘100第二端部的左右两侧获得的支撑效果一致,有利于提升小型底盘100在运动过程中的稳定性和在转向过程中的流畅性;两个减震悬架安装连接在底板101上,并且分别靠近底板101的左右两侧的边缘设置,减震悬架、驱动轮102和从动轮103一一对应设置,在本实施例中,每个悬架均包括第一连接段104、第二连接段105、安装座106、两个旋转阻尼107、卡板108、弹性减震器109和阻尼杆110,其中安装座106紧固连接在底板101上;第一连接段104包括第一l形连杆1041和第二l形连杆1042,第一l形连杆1041从底板101的侧部向底板101的第一端部弯折,第二l形连杆1042从底板101的第一端部的外侧向内侧弯折,第一l形连杆1041的位于底板101的侧部的一端通过其中一个旋转阻尼107与安装座106的一端转动连接,第二l形连杆1042的内端与驱动轮102安装连接,第一l形连杆1041的位于底板101的第一端部的一端与第二l形连杆1042的外端紧固连接,并且相交形成夹角,该夹角优选为90度,使得驱动轮102可以靠近底板101的第一端部的边缘安装,从而给小型底盘100的中部让出更多空间,有助于解决现有六轮的小型底盘体积较大的技术问题,有利于提升小型底盘100的适应性;第二连接段105包括第三l形连杆,第三l形连杆从上向下弯折,第三l形连杆的底端与从动轮103连接,第三l形连杆的拐角部通过另一个旋转阻尼107与安装座106的另一端转动连接;两个旋转阻尼107的端部与卡板108的两端卡接,卡板108紧固连接在安装座106上;从而使两个旋转阻尼107卡紧在安装座106的两个端部上,并且对第一连接段104和第二连接段105形成阻尼效果;弹性减震器109跨设在安装座106的上方,优选为弹簧减震器,弹性减震器109的两端分别与第一l形连杆1041和第三l形连杆的顶端转动连接,从而对驱动轮102和从动轮103的振动进行缓冲,使得小型底盘100在运动过程中更加平稳;阻尼杆110跨设在安装座106的上方,阻尼杆110的两端分别转动连接在安装座106的支撑件和第一l形连杆1041上,从而可以对驱动轮102进行压力补偿,即在小型底盘100的载荷不同时,可以通过阻尼杆110自动调节驱动轮102的轮压,在保证足够驱动力的情况下,使驱动轮102获得更好的操纵性,在同一前悬架上,阻尼杆110和弹性减震器109分别位于第一l形连杆1041的左右两侧,进而可以避免在第一连接段104的运动过程中阻尼杆110与弹性减震器109发生干涉;弹性牵拉件113和悬架一一对应设置,并且每个弹性牵拉件113的两端分别与第一连接段104和底板101的第一端部紧固连接,防止当底板101的第二端部翘起时底板101的第一端部下沉过于严重。
49.本技术还提出一个机器人实施保护方案:
50.请参阅图1和图5,本技术提供的机器人1包括上述实施例所述的小型底盘100。具体地,机器人1还包括机身支架200,同时,小型底盘100还包括顶板111,顶板111通过多个垂直连接在底板101顶面上的支撑杆112安装连接在底板101的顶侧,机身支架200紧固连接在顶板111的靠近两个驱动轮102所在侧的端部。
51.本技术实施例提供的机器人1,采用了小型底盘100,通过从底板101的侧部向底板101第一端部的内部弯折的第一连接段104将驱动轮102安装连接在底板101上,以及通过从
上向下弯折的第二连接段105将从动轮103安装连接在底板101上,使得驱动轮102和从动轮103能够尽量靠近底板101的边缘设置,不用占用底板101的内部空间,使得底板101的内部有足够的空间放置电池等组件,而无需额外增加容置空间,从而有效地解决了现有六轮的移动底盘体积较大的技术问题,有利于提升机器人1的适应性,使得机器人1可以适用在通道较窄的场所里。
52.以上所述仅为本技术的较佳实施例而已,并不用以限制本技术,凡在本技术的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。