1.本发明涉及一种航空发动机控制方法。
背景技术:
2.传统的航空发动机控制是基于传感器的控制,即通过可测的转速、压比和温度等发动机状态参数来间接控制发动机推力及喘振裕度等性能参数。这种控制模式虽然简单、可靠,但是难以准确获得发动机工作过程中推力/喘振裕度等不可测参数的变化情况,为了保证发动机在全生命周期的安全控制,必须采用过于保守的控制方法,这就限制了发动机性能的充分发挥。目前,面对未来航空发动机提出的高效率、高推重比、高稳定性、高安全性等高性能要求,模型基控制是最有可能实现这一目标的控制方法。
3.模型基控制是指通过机载自适应模型来在线反馈发动机的实时工作状态,计算出推力和喘振裕度作为反馈量,构成直接推力控制和直接喘振裕度闭环控制回路,从而充分挖掘发动机潜力。相比于传统控制方法:1)可提高油门杆和推力之间的线性度、消除油门杆空行程,改善飞行员的驾驶体验,提高发动机推力响应;2)可使发动机稳定工作在高压比、高效率的喘振边界附近,大幅提高了发动机工作范围,是目前最有希望提升航空发动机性能的控制技术之一。
4.而当前模型基控制技术又存在诸多不足,如基于机载自适应模型的推力/喘振裕度等不可测参数估计精度难以在全包线、全状态范围内得到保证,采用先进复杂的算法设计的控制器虽然可以达到更好的控制效果,但验证成本高昂,同时也受到各种条件制约难以进行覆盖所有极限工作范围和极限工作场景的试验测试。由于模型基控制难以展开v&v(verification and validation)验证导致的安全性不足等问题,其难以在工程中进行机载应用。
技术实现要素:
5.本发明所要解决的技术问题在于克服现有航空发动机模型基控制技术的不足,提供一种航空发动机控制方法,可大幅提高航空发动机控制系统的安全性,也大大降低了先进控制算法的验证成本。
6.本发明具体采用以下技术方案解决上述技术问题:
7.一种航空发动机控制方法,以模型基控制器作为主控制系统对所述航空发动机进行控制,并对航空发动机的工作状态及模型基控制器的工作情况是否正常进行实时监控,如发现异常,则切换至作为备份控制系统的转速/压比控制器来对所述航空发动机进行控制;当以下条件全部得到满足时,判定航空发动机的工作状态及模型基控制器的工作情况正常,否则,判定异常:航空发动机的状态参数均在预设范围内;航空发动机参数的实际测量值与模型基控制器的估计值之间的误差均在预设范围内;航空发动机未处于接近失稳状态。
8.基于同一发明构思还可以得到以下技术方案:
9.一种航空发动机控制装置,包括:
10.模型基控制器,其作为所述航空发动机的主控制系统;
11.转速/压比控制器,其作为所述航空发动机的备份控制系统;
12.实时监视器,用于对航空发动机的工作状态及模型基控制器的工作情况是否正常进行实时监控;当以下条件全部得到满足时,实时监视器判定航空发动机的工作状态及模型基控制器的工作情况正常,否则,判定异常:航空发动机的状态参数均在预设范围内;航空发动机参数的实际测量值与模型基控制器的估计值之间的误差均在预设范围内;航空发动机未处于接近失稳状态;
13.切换逻辑,用于根据实时监视器的监控结果控制主控制系统与备份控制器系统的切换。
14.优选地,通过以下方法判断航空发动机是否处于接近失稳状态:使用基于压力相关度测量的近喘喘振裕度估计方法和基于完备集成经验模态分解(ceemdan)的希尔伯特
‑
黄变换(hilbert
‑
huang transform)时频谱分析法分别对航空发动机是否处于接近失稳状态进行判定,只要其中一个判定结果为是,则判定航空发动机处于接近失稳状态。
15.优选地,所述航空发动机的状态参数包括:风扇转速、核心机转速、高压压气机出口静压、高压压气机喘振裕度、低压压气机喘振裕度、类油气比;所述航空发动机参数的实际测量值与模型基控制器的估计值之间的误差包括:风扇转速估计残差、核心机转速估计残差、高压压气机总温估计残差、高压压气机出口静压估计残差、低压涡轮出口总温估计残差、低压涡轮出口总压估计残差。
16.优选地,所述模型基控制器是利用机载自适应模型估计航空发动机的推力和喘振裕度,分别形成推力和喘振裕度闭环反馈控制回路,计算并通过保护逻辑得到最佳燃油流量指令,输出给执行机构来控制发动机。
17.优选地,所述切换逻辑具体如下:
18.step1:开始,主控制系统运行,并设置初始值k=0,t=0以及阈值nthr、tthr、mthr、nthr;
19.step2:对k值变化进行统计,并计算当前短时间内k值变化的频率n;
20.step3:判断n是否大于nthr,如果“是”,进入step4,如果“否”,切换为备份控制系统,并不再触发切换逻辑;
21.step4:对实时监控的结果是否为异常进行判断,进入防止虚报事件触发切换逻辑:
22.1)如果“真”,m ,n=0;如果“假”,m=0,n ;
23.2)判断m大于mthr和n大于nthr两个事件“或”,如果“真”,进入step5;如果“假”,重新进入step4。
24.step5:判断实时监控的结果是否为异常,如果“真”,t清零,并开始计时,切换为备份控制系统;如果“假”,判断k是否等于0,如果“是”切换为主控制系统,进入step2,如果“否”切换为备份控制系统;
25.step6:k=1,t ;
26.step7:判断t是否大于等于tthr以及实时监控的结果是否为异常,并将两个事件“与”,如果“真”,k=0,进入step2,如果“假”,进入step2。
27.相比现有技术,本发明技术方案及其进一步改进技术方案具有以下有益效果:
28.(1)解决了现有的航空发动机模型基控制方法存在的难以展开v&v验证导致的安全性不足问题,提高了模型基控制的安全性,也大大降低了先进控制算法的验证成本。
29.(2)通过非相似余度失稳预测算法得出的失稳预警信号,引入到实时监视器中作为是否从主控制系统(模型基控制)切换到备份控制系统(传统控制)的关键判据,解决了当实时监视器监测的性能参数没有超出(或小于)设定的阈值但发动机已经处于失稳状态的问题,有效提高了模型基控制的安全性。
30.(3)本发明所设计的切换逻辑解决了实时监视器可能出现虚报信号的问题以及主控制系统与备份控制系统因实时监视器预警信号发出频繁切换信号而导致系统震荡的问题。
31.(4)在充分挖掘发动机性能的条件下,为模型基控制工程应用提供了途径。
附图说明
32.图1为本发明航空发动机控制装置的控制架构;
33.图2为非相似余度失稳预测模块的结构原理示意图;
34.图3为切换逻辑图。
具体实施方式
35.当前的航空发动机模型基控制技术采用了许多具有学习、自适应、自我调节和重新分配等能力的复杂算法,但这些算法在系统应用前,由于高昂的验证成本及现有条件的制约,难以开展发动机模型基控制方法的v&v验证,无法保证系统的安全性,如果直接进行闭环反馈控制可能会出现算法失效、软件错误以及硬件故障等情况导致发动机进入失稳状态。因此,本发明提出一种以模型基控制方法为主控制系统、以传统控制方法为备份控制系统的混合控制策略,通过实时监视器实时检测系统状态变化情况,并开发稳定安全的控制器切换逻辑,实现高安全性的航空发动机智能模型基控制。
36.具体而言,本发明航空发动机控制方法,以模型基控制器作为主控制系统对所述航空发动机进行控制,并对航空发动机的工作状态及模型基控制器的工作情况是否正常进行实时监控,如发现异常,则切换至作为备份控制系统的转速/压比控制器来对所述航空发动机进行控制;当以下条件全部得到满足时,判定航空发动机的工作状态及模型基控制器的工作情况正常,否则,判定异常:航空发动机的状态参数均在预设范围内;航空发动机参数的实际测量值与模型基控制器的估计值之间的误差均在预设范围内;航空发动机未处于接近失稳状态。
37.本发明航空发动机控制装置,包括:
38.模型基控制器,其作为所述航空发动机的主控制系统;
39.转速/压比控制器,其作为所述航空发动机的备份控制系统;
40.实时监视器,用于对航空发动机的工作状态及模型基控制器的工作情况是否正常进行实时监控;当以下条件全部得到满足时,实时监视器判定航空发动机的工作状态及模型基控制器的工作情况正常,否则,判定异常:航空发动机的状态参数均在预设范围内;航空发动机参数的实际测量值与模型基控制器的估计值之间的误差均在预设范围内;航空发
动机未处于接近失稳状态;
41.切换逻辑,用于根据实时监视器的监控结果控制主控制系统与备份控制器系统的切换。
42.为了便于公众理解,下面通过一个优选实施例并结合附图来对本发明的技术方案进行详细说明:
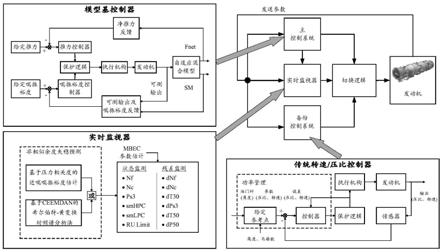
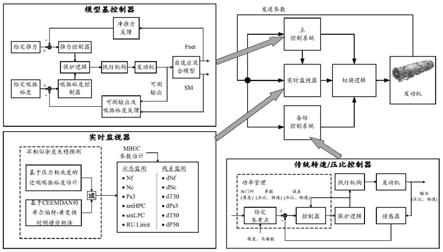
43.本实施例的航空发动机控制装置如图1所示,包括:模型基控制器、传统转速/压比控制器、实时监视器以及切换逻辑。下面对其各部分进行进一步详细说明:
44.(1)主控制系统
45.设计基于航空发动机模型基控制器的主控制系统,利用机载自适应模型估计航空发动机的推力(fnet)和喘振裕度(sm),分别形成推力和喘振裕度闭环反馈控制回路,计算并通过保护逻辑得到最佳燃油流量指令,输出给执行机构来控制发动机。在航空发动机正常工作时,使用航空发动机模型基控制器,以充分发挥航空发动机的潜力。具体原理和结构如图1所示。
46.(2)备份控制系统
47.采用传统的基于传感器的控制方法为备份控制系统,通过航空发动机转速/压比作为反馈进行控制,采取更为保守的设计,留有更大的喘振裕度,能够控制航空发动机的工作点尽可能地远离喘振边界,相对于模型基控制器具有更高的可靠性。具体原理和结构如图1右下角所示。
48.(3)实时监视器
49.实时监视器主要监测航空发动机的工作状态及模型基控制器的工作情况,以作为是否切换到传统控制系统的判据,其结构和原理如图1左下角所示。状态监测参数主要包括:风扇转速(nf)、核心机转速(nc),高压压气机出口静压(ps3)、高压压气机喘振裕度(smhpc)、低压压气机喘振裕度(smlpc)以及类油气比ru(wf/ps3)limit。残差监测参数为模型基(mbec)与真实发动机可测参数之差,主要包括:风扇转速估计残差(dnf)、核心机转速估计残差(dnc),高压压气机总温估计残差(dt30)、高压压气机出口静压估计残差(dps3)、低压涡轮出口总温估计残差(dt50)以及低压涡轮出口总压估计残差(dp50)。
50.针对航空发动机工作状态参数和可测输出残差设定相应阈值,以监测模型基先进控制器的工作情况,如果监测参数超出相应阈值,输出“1”触发信号,反之,输出“0”触发信号;
51.同时,通过基于压力相关度的近喘喘振裕度估计和基于ceemdan的希尔伯特
‑
黄变换时频谱分析法的失稳先兆信号相结合的非相似余度的失稳预测方法(如图2所示),判断发动机是否处于接近失稳状态。如果判断为失稳状态,输出“1”触发信号,反之,输出“0”触发信号。
52.其中,基于压力相关度测量的近喘喘振裕度估计方法为现有技术,详细内容可参见(manj dhingra.compressor stability management[d]//american:georgia institute of technology.2006)其具体实现如下:
[0053]
1)首先,根据压力传感器获得的叶片附近的压力脉动信号,计算用于度量压力脉动信号重复性的相关度;
[0054]
2)其次,选取合适的阈值计算单位时间内相关度测量穿越阈值事件(events),根
据试验数据的离线分析,获得单位时间内穿越阈值事件与喘振裕度的固有特性关系(μ
‑
sm),建立基于相关度测量的发动机近喘喘振裕度估计模型;
[0055]
3)根据发动机近喘喘振裕度估计模型,通过插值法即可对发动机真实喘振裕度作出准确地估计;
[0056]
4)最后根据喘振裕度是否穿越喘振预警阈值判断发动机是否失稳。
[0057]
本实施例采用基于ceemdan的希尔伯特
‑
黄变换时频谱分析法来分析发动机压气机失稳信号。首先,选用采集的压气机叶片附近的压力脉动信号作为检测信号。然后基于ceemdan对检测信号(原始信号)分解成一系列的本征模态函数(imf),然后对这些imf分量进行hilbert变换,从而在时频平面上得到能显示能量分布的hilbert时频谱图,再对其频谱进行分析,根据是否穿越阈值来做出失稳预警判断。具体实现如下:
[0058]
定义x(t)为原始信号,ε0为噪声标准差,w
j
(t)表示第j次加到原始信号中的零均值单位方差的包噪声,e
k
(
·
)是由ceemdan产生的第k阶模态分量算子,c
i
(t)是信号经过分解后得到的第i阶imf分量,t为时间变量。
[0059]
1)将噪声ε0w
j
(t)加到x(t)中,每添加一次噪声都通过ceemdan分解对信号进行一次加噪处理后,得到加入j次噪声后分解出的ceemdan一阶模态分量:
[0060][0061]
2)计算1)中的第一个剩余量信号r1(t):
[0062]
r1(t)=x(t)
‑
c
i
(t)
[0063]
3)按照1)向r1(t)添加噪声分量ε1e1w
j
(t),然后对添加噪声的余量信号进行分解,直到零点个数和极值个数相差不超过1时,分解结束,得到第一个imf分量,则得到ceemdan二阶模态分量为:
[0064][0065]
4)重复2)和3),计算第j个余量信号和第j 1模态分量:
[0066]
r
i
(t)=x
i
‑1(t)
‑
c
i
(t)
[0067][0068]
5)执行直至ceemdan分解的余量信号无法进行emd分解,即残余分量满足分解条件;
[0069]
6)分解终止后,得到分解的模态分量i个,原始信号表示为:
[0070][0071]
7)进行hilbert变换;
[0072]
8)频谱分析,根据阈值做出失稳预警信号。如果判断为失稳状态,输出“1”触发信号,反之,输出“0”触发信号。
[0073]
step3:对此两种方法触发信号进行事件“或”运算,如果为“1”,则事件为“真”,如果为“0”,则事件为“假”。
[0074]
(4)切换逻辑
[0075]
如图3所示,本实施例中的主、备控制系统切换逻辑具体如下:
[0076]
step1:开始,主控制系统运行,并设置初始值k=0,t=0以及阈值nthr,tthr,mthr,nthr;
[0077]
step2:对k值变化进行统计,并计算当前短时间内k变化的频率(n);
[0078]
step3:判断n是否大于nthr,如果“是”,进入step4,如果“否”,切换为备份控制系统,并不再触发切换逻辑;
[0079]
step4:对来自实时监视器的判据信号进行判,进入防止虚报事件触发切换逻辑。
[0080]
1)如果“真”,m ,n=0;如果“假”,m=0,n ;
[0081]
2)判断m大于mthr和n大于nthr两个事件“或”,如果“真”,进入step5;如果“假”,重新进入step4。
[0082]
step5:判断实时监视器的判据信号,如果“真”,t清零,并开始计时,切换为备份控制系统;如果“假”,判断k是否等于0,如果“是”切换为主控制系统,进入step2,如果“否”切换为备份控制系统;
[0083]
step6:k=1,t ;
[0084]
step7:判断t是否大于等于tthr以及来自实时监视器的判据信号两个事件“与”,如果“真”,k=0,进入step2,如果“假”,进入step2。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。