1.本实用新型属于起重机制动防护技术领域,具体涉及一种夹轨制动自锁装置。
背景技术:
2.门式起重机作为物料搬运机械中的最主要的一种,在机械制造、冶金、钢铁、码头集装箱装运等行业中得到了广泛的应用。门式起重机体积和占地面积都较大,一般都安装在外场地,且受迎风面积较大,使得在一些风害多发地区,非工作状态的时候很有可能会在大风的推力作用下,无人操作而沿着轨道移动,存在安全隐患。为避免受风力作用而出现溜车现象,除了靠自身设备的制动系统外,还可利用各类型的夹轨器来稳固设备,若遇强风天气,还可采用专用的铁鞋装置和电动锚定装置,但还是频繁发生大车溜车事故,究其原因主要有如下两点:其一,风力已经超过现有的港口起重机制动装置所能达到的制动能力,现有的制动装置的制动力远远不够。其二,现有制动装置,其自身的结构特点,制动能力达不到理论设计能力,实际制动能力无法确定。如果无限制增加夹轨器、轮边制动器,其制动能力并不是无限制地增加,而设备增加给设备维护、保养带来非常大的工作量,制动装置增加,能耗也随之增加,故障发生的概率也增大,不利于提高生产作业效率,这些都给现场操作人员带来诸多困扰,亟待解决。
技术实现要素:
3.本实用新型的目的是克服上述现有技术的不足,提供一种结构合理且使用可靠便捷的夹轨制动自锁装置,其能解决起重机的防溜车问题,并同步具备实用性强、能耗小且工作可靠稳定的效果,能确保门式起重机以及其它同类机械设备的防风安全。
4.为实现上述目的,本实用新型采用了以下技术方案:
5.一种夹轨制动自锁装置,其特征在于:包括用于直接夹持并抱死在轨道上的制动自锁组件以及用于驱动制动自锁组件产生指定动作的动力组件;所述制动自锁组件包括左钳臂、右钳臂以及水平铰接在两组钳臂的中段臂身处的水平连杆,两组钳臂的前端构成用于相向动作并夹紧轨道的工作端;制动自锁组件还包括水平铰接在相应钳臂后端处的自锁连杆,两组自锁连杆的相邻端彼此铰接且与动力组件的动力输出端形成动力配合,各彼此配合的连杆之间以及各连杆与相应钳臂之间的铰接轴线均彼此平行;动力组件固定于起重机机架上,且当动力组件驱动两组自锁连杆动作直至两组自锁连杆的杆身处于同一直线上时,两组钳臂的工作端与轨道间形成死点自锁状态。
6.优选的,所述动力组件包括输出轴轴线铅垂设置的自锁直线动力源以及起到动力过渡功能的动力连杆机构;所述动力连杆机构包括固定于起重机机架上的铅垂杆,水平连杆固定在铅垂杆上,铅垂杆顶端通过第一水平铰接座铰接有水平杆;水平杆的后端通过第二水平铰接座铰接在自锁直线动力源的输出轴上,水平杆的前端通过第三水平铰接座铰接在过渡杆上,过渡杆再与自锁连杆的相应端形成铰接配合;各水平铰接座轴线彼此平行,且与自锁连杆处的铰接处轴线相垂直。
7.优选的,该装置还包括驱动方向与自锁直线动力源同向的提升直线动力源以及用于固定提升直线动力源的固定架,提升直线动力源固定于u型的固定架的槽腔内,固定架的后槽口处依序的铰接有第一提升杆和第二提升杆,第一提升杆水平布置且提升直线动力源的输出轴水平铰接在第一提升杆的中段杆身处;第二提升杆杆长方向铅垂设置,且第二提升杆的底端铰接在“l”型的悬浮架的顶端,悬浮架与固定架间形成面贴合配合;铅垂杆以及自锁直线动力源均固定在悬浮架上,且各提升杆之间铰接处以及第二提升杆与悬浮架之间铰接处的铰接轴线均平行所述第一水平铰接座的铰接轴线。
8.优选的,所述左钳臂及右钳臂彼此面对称布置,且两组钳臂、一组水平连杆及两组自锁连杆均位于同一铅垂面上;左钳臂及右钳臂外形均呈“z”字状,各钳臂的前端处相邻面设置便于卡入“工”字状的轨道侧面处的定位槽,所述定位槽槽腔及槽口轮廓与轨道的侧面轮廓相吻合。
9.优选的,该装置还包括自动检测控制组件,所述自动检测控制组件包括用于监控各提升杆、动力连杆机构、悬浮架以及自锁连杆当前所在位置的位置传感器以及用于检测当前风力的风速仪,位置传感器及风速仪将所获取信息传递至程序控制模组处,以便程序控制模组控制动力组件产生既定动作。
10.本实用新型的有益效果在于:
11.1)、通过上述方案,本实用新型利用了死点自锁技术,依靠两组钳臂与一组水平连杆配合形成卡钳结构,此时卡钳的前端形成工作端,卡钳的后端形成施力端;在施力端处再布置自锁连杆,当动力源驱动两组自锁连杆处于同一直线上时,两组钳臂的工作端刚好抱死在轨道上,且两组自锁连杆形成自锁状态,从而有效的解决起重机的防溜车问题。
12.显然,综上所述,本实用新型具备实用性强、能耗小且工作可靠稳定的效果,能确保门式起重机以及其它同类机械设备的防风安全。
13.2)、作为上述方案的进一步优选方案,动力组件主要由自锁直线动力源及动力连杆机构形成。当然,实际操作时,自锁直线动力源,包括提升直线动力源,均可采用诸如液压缸等直行程机构来实现;同理,各动力源可以直接安装在被驱动部件的同平面上,如自锁直线动力源可以直接安装在制动自锁组件的正上方且两者处于同一铅垂面,以保证驱动功能。本实用新型优选通过动力连杆机构来形成过渡件,使得自锁直线动力源与制动自锁组件分置在动力连杆机构的两侧,一方面使得高度上的占用空间更小,也有利于减少受风面;另一方面,通过跷跷板结构的动力连杆机构,可进一步提升自锁效果,一举多得。
14.3)、提升直线动力源及相应提升杆及悬浮架的布置,使得作为前置件的动力组件和制动自锁组件具备了高度方向上的动作目的,从而使得两组钳臂的工作端可适时的抬离轨道,确保在非制动状态下不影响起重机沿轨道的正常行进动作。
附图说明
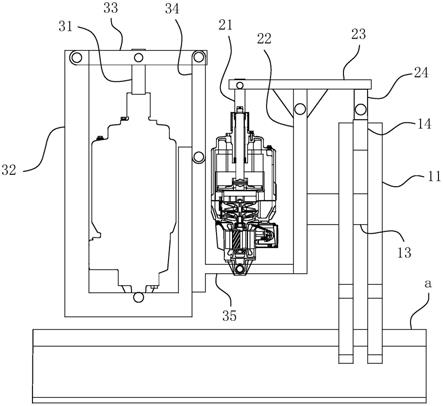
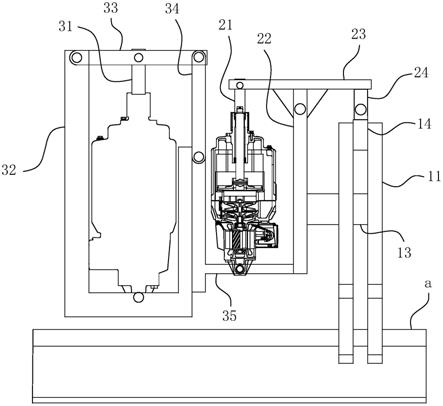
15.图1为制动自锁组件处于死点自锁状态下时,本实用新型的正视图;
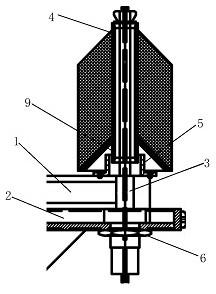
16.图2为图1所示结构的右视图。
17.本实用新型各标号与部件名称的实际对应关系如下:
18.a
‑
轨道
19.11
‑
左钳臂 12
‑
右钳臂 13
‑
水平连杆 14
‑
自锁连杆 15
‑
定位槽
20.21
‑
自锁直线动力源 22
‑
铅垂杆 23
‑
水平杆 24
‑
过渡杆
21.31
‑
提升直线动力源 32
‑
固定架
22.33
‑
第一提升杆 34
‑
第二提升杆 35
‑
悬浮架
具体实施方式
23.为便于理解,此处结合图1
‑
2,对本实用新型的具体结构及工作方式作以下进一步描述:
24.本实用新型的具体结构如图1
‑
2所示,包括制动自锁连杆14系统、提升系统和自动检测控制系统。其中:
25.制动自锁连杆14系统包括如图1所示的由右至左依序布置的制动自锁组件、动力连杆机构以及自锁直线动力源21。制动自锁组件为对称结构,包括两组通过水平连杆13彼此铰接的左钳臂11及右钳臂12。两组钳臂的前端也即如图2所示的顶端设置定位槽15,以便于在死点自锁状态时能吻合的紧紧抱死在轨道a上。两组钳臂的后端也即如图2所示的顶端一一对应的布置自锁连杆14。对于动力连杆机构而言,其与自锁直线动力源21均安装在悬浮架35上。动力连杆机构包括铅垂杆22及水平杆23,且铅垂杆22、水平连杆及悬浮架35形成一体式结构。自锁直线动力源21产生伸缩动作时,通过跷跷板结构的动力连杆机构将动力经由过渡杆24传递至自锁连杆14处。
26.对于提升系统而言,其结构如图1所示的包括提升直线动力源31、第一提升杆33和第二提升杆34,第二提升杆34处再铰接悬浮架35。在如图1
‑
2所示状态下,位于固定架32处的提升直线动力源31处于初始状态时,此时第一提升杆33水平布置,第二提升杆34铅垂布置,悬浮架35贴合在固定架32上,左钳臂11及右钳臂12刚好处于彼此配合夹紧和抱死轨道a的状态。
27.本实用新型在上述结构的基础上,还提供了一套控制模组,以实现对本实用新型自动化控制目的。当然,在使用时,该控制模组可以与现有技术中的软件配合来实现自动控制,但是必须指出的是:与本控制系统相配合的软件不是本实用新型的创新部分,也不是本实用新型的组成部分。本实用新型的保护仅延及到由物理部件和导线而构成的硬件网络,如各传感器及风速仪的布置状态及工作状态等,而不涉及到对软件的改进和保护。
28.在此基础上,本实用新型的自动检测控制系统也即自动检测控制组件,包括用于监控各提升杆、动力连杆机构、悬浮架35以及自锁连杆14当前所在位置的位置传感器以及用于检测当前风力的风速仪,位置传感器及风速仪将所获取信息传递至程序控制模组处,以便程序控制模组控制动力组件产生既定动作。
29.为便于进一步了解本实用新型,此处结合图1
‑
2,给出本实用新型实际工作流程如下:
30.在得到自动检测控制系统的指令后,自锁直线动力源21动作,通过动力连杆机构的力的传递,驱动自锁连杆14动作,直至两组钳臂彼此配合夹住轨道a。此时,可依靠各钳臂处定位槽15与轨道a之间的滑动摩擦力产生制动效果。随后,自锁直线动力源21进一步推动,直至两组自锁连杆14处于如图1
‑
2所示的同一直线上,自动检测控制系统得到反馈信号后立即发出停止动作指令,自锁直线动力源21停止驱动,自锁连杆14处于机械自锁位置。同时,由于自锁连杆14与各钳臂之间的铰接配合,使各钳臂的工作端与轨道a接触面之间存在
一定夹角,即产生一个侧面偏转力矩,当夹角增大到摩擦角时产生摩擦力自锁,此时,在理论上相当于产生无穷大的摩擦力,从而使本发明的制动效果发挥到理想状态。上述流程反之为松开制动,此处就不再赘述。
31.在不需要制动状态时,提升直线动力源31产生动作,驱动第一提升杆33和第二提升杆34产生动作,带动前述整个制动自锁组件及动力组件上升。在自动检测控制系统收到运行位置检测信号后,发出停止运作信号,提升直线动力源31停止动作,从而使整个机构处于轨道a上方的安全位置。反之,则下放制动自锁组件直至位于轨道a高度处,以便于执行前述的制动自锁动作。
32.当然,对于本领域技术人员而言,本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
33.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
34.本实用新型未详细描述的技术、形状、构造部分均为公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。