1.本实用新型涉及机械加工技术领域,更具体地说,本实用新型涉及一种导弹零件打孔用摇臂钻床。
背景技术:
2.摇臂钻床是一种摇臂可绕立柱回转和升降,通常主轴箱在摇臂上作水平移动的钻床,是一种孔加工设备,可以用来钻孔、扩孔、铰孔、攻丝及修刮端面等多种形式的加工,这种钻床经常用于导弹的研制中,在导弹的研发过程中,我们经常会用到摇臂钻孔来对导弹上的一些部件进行打孔工作,在现在市场上的摇臂钻床都有一定缺陷性,例如,当我们要对一些机械零件进行打孔时,需要对其不同方向上进行打孔时,通常需要人力进行搬运,非常的麻烦,工作效率非常的低下,且不适合超大型的零件加工,有一定的局限性。
3.是摇臂钻床在工作过程中,常常需要对精度要求较高的加工件进行加工,现有技术中,摇臂钻大多采用人工判断或者是在加工件上标示好加工位置再进行加工,效率低下,不能满足快速加工业的需求。
技术实现要素:
4.本实用新型需要解决的技术问题是提供一种导弹零件打孔用摇臂钻床。
5.为解决上述技术问题,本实用新型所采取的技术方案如下。
6.一种导弹零件打孔用摇臂钻床,包括摇臂钻床,所述摇臂钻床的底部固定安装有机床底座,所述机床底座的顶部固定安装有旋转控制箱,所述旋转控制箱内腔的底部固定安装有驱动电机,所述驱动电机的左右两侧均固定安装有固定杆,所述驱动电机的顶部活动套接有转杆,所述转杆的顶部固定安装有固定爪,所述旋转控制箱的顶部固定安装有支撑盘,所述支撑盘的顶部固定安装有载物台,所述支撑盘顶部的左右两侧均固定安装有支撑杆,所述支撑杆外表面活动套接有第一滑块,所述第一滑块的顶部螺纹安装有紧固螺丝,所述紧固螺丝的底部固定安装有磁铁;
7.所述摇臂钻床的顶部固定安装有x轴滑轨,所述x轴滑轨的外表面活动套接有第二滑块,所述第二滑块的底部固定安装有电动伸缩杆,所述电动伸缩杆的底部固定安装有打孔切刀,所述x轴滑轨的外表面固定套接有刻度盘,所述电动伸缩杆的一侧固定安装有光感控制箱。
8.其中,光感控制箱的底部镶嵌安装有光学感应器,光感控制箱内腔的一侧固定安装有支撑座,支撑座的顶部固定安装有控制器,控制器的一侧连接有信号传输导线,光感控制箱内腔的另一侧固定安装有电动伸缩杆开关。
9.其中,摇臂钻床的外表面固定安装有观测窗,摇臂钻床的外表面固定安装有把手,摇臂钻床的外表面固定安装有显示屏,摇臂钻床的外表面固定安装有控制面板。
10.其中,机床底座的内腔固定安装有承重块,机床底座内腔的底部放置有吸水树脂。
11.其中,信号传输导线的数量有若干个,光学感应器的顶部通过信号传输导线与控
制器的一侧连接,控制器的一侧通过信号传输导线与电动伸缩杆开关的一侧连接。
12.其中,固定杆的材质为塑胶材料,观测窗的长度在十厘米到二十厘米之间,宽度在八厘米到十五厘米之间。
13.其中,光学感应器的输出端与控制器的输入端电性连接,控制器的输出端与电动伸缩杆开关的输入端电性连接。
14.由于采用了以上技术方案,本实用新型所取得技术进步如下。
15.本实用新型利用遥控传感装置,当我们要对一些机械零件进行打孔需要对其不同方向上进行打孔时,通常需要人力进行搬运,非常的麻烦,工作效率非常的低下,且不适合超大型的零件加工,有一定的局限性,此时在设备中增加一个全方位工件旋转机构来对加工的工件进行必要的翻转和移动,利用底部的电机以及可旋转的夹紧件来对工件进行旋转,保证了加工的效率,且避免了由于人工搬运致使的工作时间的浪费,提高了装置的实用性。本实用新型利用光学传感器对机械零件进行感应,并发出信号至控制器,控制器控制电动伸缩杆开关,以此来对其进行伸缩,达到精确切割的目的,满足了快速加工业的需要。
附图说明
16.图1为本实用新型的原理框图;
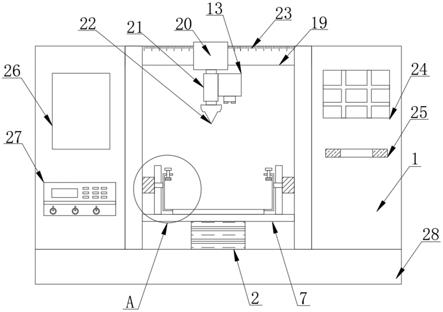
17.图2为本实用新型的旋转控制箱结构示意图;
18.图3为本实用新型图1的a处放大结构示意图;
19.图4为本实用新型的光感控制箱内部结构示意图;
20.图5为本实用新型的机床底座内部结构示意图。
21.其中:1、摇臂钻床;2、旋转控制箱;3、驱动电机;4、固定杆;5、转杆;6、固定爪;7、支撑盘;8、载物台;9、支撑杆;10、第一滑块;11、紧固螺丝;12、磁铁;13、光感控制箱;14、光学感应器;15、支撑座;16、控制器;17、信号传输导线;18、电动伸缩杆开关;19、x轴滑轨;20、第二滑块;21、电动伸缩杆;22、打孔切刀;23、刻度盘;24、观测窗;25、把手;26、显示屏;27、控制面板;28、机床底座;29、承重块;30、吸水树脂。
具体实施方式
22.下面将结合附图和具体实施方式对本实用新型进行进一步详细说明。
23.一种导弹零件打孔用摇臂钻床,其结构如图1至图5所示,包括摇臂钻床1,所述摇臂钻床1的底部固定安装有机床底座28,所述机床底座28的顶部固定安装有旋转控制箱2,所述旋转控制箱2内腔的底部固定安装有驱动电机3,所述驱动电机3的左右两侧均固定安装有固定杆4,所述驱动电机3的顶部活动套接有转杆5,所述转杆5的顶部固定安装有固定爪6,所述旋转控制箱2的顶部固定安装有支撑盘7,所述支撑盘7的顶部固定安装有载物台8,所述支撑盘7顶部的左右两侧均固定安装有支撑杆9,所述支撑杆9外表面活动套接有第一滑块10,所述第一滑块10的顶部螺纹安装有紧固螺丝11,所述紧固螺丝11的底部固定安装有磁铁12。
24.摇臂钻床1的顶部固定安装有x轴滑轨19,所述x轴滑轨19的外表面活动套接有第二滑块20,所述第二滑块20的底部固定安装有电动伸缩杆21,所述电动伸缩杆21的底部固定安装有打孔切刀22,所述x轴滑轨19的外表面固定套接有刻度盘23,所述电动伸缩杆21的
一侧固定安装有光感控制箱13。
25.光感控制箱13的底部镶嵌安装有光学感应器14,光感控制箱13内腔的一侧固定安装有支撑座15,支撑座15的顶部固定安装有控制器16,控制器16的一侧连接有信号传输导线17,光感控制箱13内腔的另一侧固定安装有电动伸缩杆开关18,摇臂钻床1的外表面固定安装有观测窗24,摇臂钻床1的外表面固定安装有把手25,摇臂钻床1的外表面固定安装有显示屏26,摇臂钻床1的外表面固定安装有控制面板27,机床底座28的内腔固定安装有承重块29,机床底座28内腔的底部放置有吸水树脂30。
26.信号传输导线17的数量有若干个,光学感应器14的顶部通过信号传输导线17与控制器16的一侧连接,控制器16的一侧通过信号传输导线17与电动伸缩杆开关18的一侧连接。
27.固定杆4的材质为塑胶材料,观测窗24的长度在十厘米到二十厘米之间,宽度在八厘米到十五厘米之间。
28.光学感应器14的输出端与控制器16的输入端电性连接,控制器16的输出端与电动伸缩杆开关18的输入端电性连接。
29.本实施例中,驱动电机3为玉豹牌,yl型号;光学感应器14为科维牌,cs
‑
3l60型号;电动伸缩杆21为聚福牌,tge型号。
30.本实用新型的工作过程如下:当设备开始工作时,控制控制面板27来对摇臂钻床1进行操控,将所需要打孔的零件放置在载物台8上,由零件的厚度来通过第一滑块10进行控制,拧动紧固螺丝11来对其进行紧固,磁铁12帮助紧固螺丝11进行紧固,当需要对零件的不同部位来进行打孔时,此时驱动电机3开始工作,带动转杆5进行旋转,转杆5旋转的同时带动支撑盘7进行旋转,固定爪6插入至支撑盘7的内部进行固定作用,当需要对零件精确打孔时,此时光学感应器14接收到需要切割的部位,此时传出信号至控制器16,控制器16开始对信号进行处理,并控制电动伸缩杆开关18,打开电动伸缩杆开关18,此时电动伸缩杆21开伸长,带动打孔切刀22对零件进行打孔处理,可通过观测窗24观测摇臂钻床1内部工作情况,承重块29帮助机床底座28进行承重,吸水树脂30可吸收渗进来的水,防止机床底座28被水腐蚀。
31.为了做到可对零件精确打孔,设置了有控制器16、光学感应器14同时还设立有电动伸缩杆21,当光学感应器14接收信号后,此时传出信号至控制器16,控制器16开始对信号进行处理,并控制电动伸缩杆开关18,打开电动伸缩杆开关18,此时电动伸缩杆21开伸长,带动打孔切刀22对零件进行打孔处理;为了做到可对零件的不同部位进行打孔,设置了驱动电机3、紧固螺丝11来对零件的不同部位进行打孔处理,提高了生产效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。