1.本实用新型涉及一种装夹定位设备,具体涉及一种公路铣刨机刀座焊接的机器人装夹定位装置,属于装夹定位设备技术领域。
背景技术:
2.公路铣刨机的刀座需要焊接到铣刨鼓上,当前行业内主要靠人工将刀座安装到定位滑台上,人工旋转铣刨鼓,依靠定位滑台和铣刨鼓旋转机构的刻度线定位刀座位置。铣刨鼓重量在2吨左右,旋转费时费力;刀座焊接工作量巨大,每个铣刨鼓需要焊接的刀座的数量在几百到几千之间,人工操作费时费力,且定位精度差,效率低下,定位精度差,影响铣刨鼓的产能和质量。
3.基于以上因素,现开发一套机器人自动装夹定位刀座的设备,配合伺服电机驱动的变位机,实现铣刨鼓的自动旋转、刀座自动装夹定位,保证刀座在铣刨鼓上焊接的定位精度,节约人工成本,提高生产效率。
技术实现要素:
4.本实用新型要解决的技术问题是克服现有技术的上述不足,提供一种公路铣刨机刀座焊接的机器人装夹定位装置。
5.为解决上述问题,本实用新型采用以下技术方案:公路铣刨机刀座焊接的机器人装夹定位装置,包括机架主体,机架主体上设置有铣刨鼓主体,铣刨鼓主体通过变位机安装在机架主体上,机架主体上设置有机器人,机器人上安装有能够对刀座进行抓取的气动夹具,气动夹具与机器人之间通过夹具防碰撞装置连接,变位机、机器人、气动夹具均连接有控制器。
6.以下是本实用新型对上述方案的进一步优化:所述夹具防碰撞装置包括与夹具防碰撞装置连接的卡盘连接座,卡盘连接座的一侧间隔一定距离设置有安装板,卡盘连接座与安装板之间设置有弹簧。
7.进一步优化:所述安装板上与弹簧对应的位置安装有导向座,弹簧内穿设有导向杆,导向杆的一端连接在卡盘连接座上,另一端贯穿至导向座的一端外并通过螺栓封装。
8.进一步优化:所述螺栓上连接有光电感应开关,该光电感应开关与控制器连接。
9.进一步优化:所述安装板上安装有机器人连接座,机器人连接座与机器人连接。
10.进一步优化:所述变位机包括在机架主体上间隔一定距离设置的第一支撑座和第二支撑座,第一支撑座和第二支撑座上分别设置有对称设置的支撑辊。
11.进一步优化:所述第一支撑座上安装有用于带动铣刨鼓主体转动的第一电机,该第一电机与控制器连接。
12.进一步优化:所述机架主体与第一支撑座之间设置有导向装置,且第一支撑座由驱动装置驱动移动。
13.进一步优化:所述导向装置包括安装在机器人上的导轨,第一支撑座上安装与导
轨配合使用的滑块。
14.进一步优化:所述驱动装置包括用于带动第一支撑座移动的第二电机,第二电机上安装有齿轮,机架主体上安装有与该齿轮配合使用的齿条。
15.使用时,先将待焊接的刀座依次排列在码放料台上,然后对控制器的参数进行设置,启动设备,控制器控制机器人带动气动夹具移动到刀座上,并进行抓取,控制器控制气动夹具夹在刀座上,机器人带动刀座移动至铣刨鼓主体的一侧,机器人保持姿态,等待焊接作业完成,焊接完成后操作者按下确认按钮发送焊接完成信号,控制器接收到焊接完成信号后,控制机器人抓取下一工件,进入下一工作循环,如此往复,直至所有刀座焊接完成,机器人系统作业完成后回到安全等待位或原位;
16.在此过程中,当铣刨鼓主体的一侧焊接完成一定数量的刀座后,工作人员通过控制台上的按钮向控制器发送指令,控制器控制铣刨鼓主体转动一定角度,继续焊接;
17.在此过程中,当机器人带动刀座顶在铣刨鼓主体上,若机器人继续动作带动安装板挤压弹簧,安装板与光电感应开关之间的距离发生变化,光电感应开关向控制器发送信号,控制器控制机器人停止动作。
18.本实用新型通过设置机器人和气动夹具,实现了对刀座的抓取和固定,方便了焊接,减轻了人工劳动量,通过设置夹具防撞装置,实现了对刀座和气动夹具的防护,本实用新型解决了现有的技术中刀座焊接工作量巨大,每个铣刨鼓需要焊接的刀座数量在几百到几千之间,人工操作费时费力,且定位精度差,效率低下,定位精度差,影响铣刨鼓的产能和质量的问题。
19.下面结合附图和实施例对本实用新型进一步说明。
附图说明
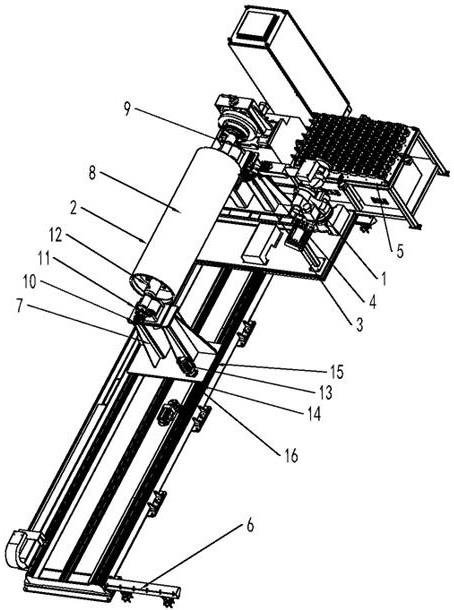
20.图1为本实用新型在实施例中的结构示意图;
21.图2为本实用新型在实施例中的左视图;
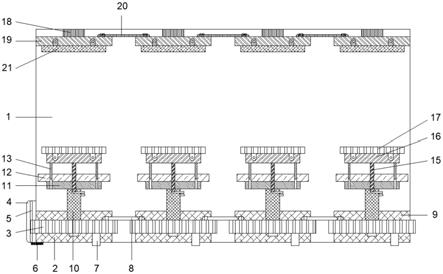
22.图3为本实用新型在实施例中的主视图;
23.图4为本实用新型在实施例中的俯视图;
24.图5为本实用新型在实施例中气动夹具的结构示意图;
25.图6为本实用新型在实施例中夹具防碰撞装置的结构示意图;
26.图7为图2中a处的放大示意图;
27.图8为本实用新型在实施例中第一支撑座的结构示意图。
28.图中:1
‑
机器人;2
‑
变位机;3
‑
气动夹具;4
‑
夹具防碰撞装置;5
‑
码放料台;6
‑
安全光幕;7
‑
第一支撑座;8
‑
铣刨鼓主体;9
‑
第二支撑座;10
‑
第一电机;11
‑
支撑辊;12
‑
起吊环;13
‑
第二电机;14
‑
导轨;15
‑
滑块;16
‑
齿条;17
‑
卡盘连接座;18
‑
机器人连接座;19
‑
安装板;20
‑
光电感应开关;21
‑
弹簧;22
‑
导向座;23
‑
导向杆;24
‑
螺栓。
具体实施方式
29.实施例,如图1
‑
8所示,公路铣刨机刀座焊接的机器人装夹定位装置,包括机架主体,机架主体上设置有铣刨鼓主体8,铣刨鼓主体8通过变位机2安装在机架主体上,机架主体上靠近铣刨鼓主体8一侧的位置设置有机器人1(机械臂),机器人1上安装有能够对刀座
进行抓取的气动夹具3,气动夹具3与机器人1之间通过夹具防碰撞装置4连接,变位机2、机器人1、气动夹具3均连接有控制器。
30.所述夹具防碰撞装置4包括与夹具防碰撞装置的一端固定连接的卡盘连接座17,卡盘连接座17为圆环形。
31.所述卡盘连接座17的一侧间隔一定距离设置有安装板19,卡盘连接座17与安装板19之间设置有多个弹簧21,多个弹簧21呈环形阵列设置。
32.所述安装板19上与每个弹簧21对应的位置分别固定安装有导向座22,导向座22的纵截面为t形,且安装板19上开设有容纳导向座22一端的圆孔。
33.所述弹簧21内穿设有导向杆23,导向杆23的一端固定连接在卡盘连接座17上,另一端贯穿至导向座22的一端外一定距离并通过螺栓24封装。
34.所述螺栓24与导向座22的一端之间设置有垫圈,导向座22上开设有容纳导向杆23移动的通孔,这样便于弹簧21的形变。
35.其中一个螺栓24上连接有光电感应开关20,该光电感应开关20与控制器连接,这样便于检测气动夹具3是否受到碰撞。
36.所述安装板19的一侧远离光电感应开关20的一端固定安装有机器人连接座18,机器人连接座18与机器人1的一端固定连接。
37.所述气动夹具3采用市面上销售的快速定位气动卡盘,气动夹具3通过气管和电磁阀连接有气源,电磁阀与控制器连接。
38.所述变位机2包括在机架主体上间隔一定距离设置的第一支撑座7和第二支撑座9,第一支撑座7和第二支撑座9的上端分别设置有对称设置的支撑辊11,这样便于对铣刨鼓主体8进行支撑。
39.所述第一支撑座7上固定安装有用于带动铣刨鼓主体8转动的第一电机10,第一电机10采用伺服电机,该第一电机10与控制器连接。
40.所述机架主体的一侧靠近机器人1的位置设置有码放料台5,这样便于放置多个刀座,该多个刀座呈矩形阵列设置,且分别倾斜一定角度。
41.所述机架主体与第一支撑座7之间设置有导向装置,且第一支撑座7由驱动装置驱动移动。
42.所述导向装置包括固定安装在机器人1上端的两个导轨14,该两个导轨14对称设置,且分别沿机架主体的长度方向设置。
43.所述第一支撑座7的底部固定安装与两个导轨14配合使用的滑块15,这样设计便于第一支撑座7的移动,以便于支撑不同长度的铣刨鼓。
44.所述驱动装置包括用于带动第一支撑座7移动的第二电机13,第二电机13固定安装在第一支撑座7上靠近下端的位置,第二电机13采用伺服电机,并与控制器连接。
45.所述第二电机13的输出轴贯穿至第一支撑座7的下端面一定距离并同轴安装有齿轮,机架主体上安装有与该齿轮配合使用的齿条16,且齿条16沿机架主体的长度方向设置。
46.所述机架主体的一侧靠近一端的位置固定安装有安全光幕6,安全光幕6与控制器连接。
47.所述铣刨鼓主体8上穿设有轴,该轴的上端面靠近两端的位置分别设置有起吊环12。
48.使用时,先将待焊接的刀座依次排列在码放料台5上,然后对控制器的参数进行设置,启动设备,控制器控制机器人1带动气动夹具3移动到刀座上,并进行抓取,控制器控制气动夹具3夹在刀座上,机器人1带动刀座移动至铣刨鼓主体8的一侧,机器人保持姿态,等待焊接作业完成,焊接完成后操作者按下确认按钮(该按钮安装在控制台上,控制台设置在机器人的一侧)发送焊接完成信号,控制器接收到焊接完成信号后,控制机器人抓取下一工件,进入下一工作循环,如此往复,直至所有刀座焊接完成,机器人系统作业完成后回到安全等待位或原位;
49.在此过程中,当铣刨鼓主体8的一侧焊接完成一定数量的刀座后,工作人员通过控制台上的按钮向控制器发送指令,控制器控制铣刨鼓主体8转动一定角度,继续焊接;
50.在此过程中,当机器人1带动刀座顶在铣刨鼓主体8上,若机器人1继续动作带动安装板19挤压弹簧21,安装板19与光电感应开关20之间的距离发生变化,光电感应开关20向控制器发送信号,控制器控制机器人停止动作。
51.本实用新型通过设置机器人和气动夹具,实现了对刀座的抓取和固定,方便了焊接,减轻了人工劳动量,通过设置夹具防撞装置,实现了对刀座和气动夹具的防护,本实用新型解决了现有的技术中刀座焊接工作量巨大,每个铣刨鼓需要焊接的刀座数量在几百到几千之间,人工操作费时费力,且定位精度差,效率低下,定位精度差,影响铣刨鼓的产能和质量的问题。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。