1.本发明涉及花叶轮叶片的切割及插片控制领域,特别涉及一种花叶轮叶片切割及插片装置。
背景技术:
2.花叶轮、百叶轮等的加工通常包括砂带的切割(切割后的砂带通常叫做叶片)、上胶、排片、插片、胶接成型等工序;这些工序中,针对切割步骤技术越发成熟,切割的效率也逐渐提高,然而现有的插片装置的插片速度不高,进而使得整体加工效率无法提高;本技术的重点是针对上述工序中,切割和插片两个动作的驱动结构进行的技术改进。
3.本技术切割步骤中,通过驱动切刀升降对砂带进行冲压切割,使得砂带切割成叶片;插片动作是通过机械手抓取切割后的叶片并运输插入至金属材质的插盘。
4.申请人在先有提出一种花叶轮插片结构,参考公开号为cn209998679u的专利申请,公开了一种花叶轮双插片机械手,该结构通过两个机械手交叉驱动实现双插片,但该在先申请控制机械手开合的结构需要分别设置以配合取料和插片动作时,这需要采用两个电机方能实现机械手开合的控制,同时掰料动作也单独设置了结构及驱动电机,如此需要多台电机方能实现取料、插片、掰料、三个动作的控制,但这三个动作实际所需要驱动的动力要求并不高,这便造成了电机的浪费和动力的闲置,整体结构也较为复杂繁琐;在先申请双插片机械手转动幅度较大,插片效率仍然受到限制,同时控制插片机械手转动时,由于传动结构限制,整体运转时的精度不足,特别是高速动作时,容易出现动作不稳定的情况。
5.本技术所要解决的技术问题为:如何优化插片机械手的结构使得插片机械手的运动更加精准平稳,缩减运动角度和距离且减少控制电机的数量和成本。
技术实现要素:
6.本发明的目的是提供一种解决上述一个或多个技术问题的的花叶轮叶片切割及插片装置。
7.为实现上述目的,本发明采用如下技术方案,花叶轮叶片切割及插片装置,包括机架及机架上的进料口和放料区,机架上设有左右对称设置的插片机械手,插片机械手由进料口至放料区做往返周期弧形运动,还包括与插片机械手驱动连接的机械手驱动结构和与插片机械手控制配合的机械手开合控制装置,机械手驱动结构包括机械手安装架、与机械手安装架固定安装的机械手电机、与机械手电机驱动连接的电机传动块、与电机传动块偏心设置的偏心传动块、与偏心传动块传动配合的机械手齿条、与机械手齿条啮合的机械手齿轮,机械手齿轮与插片机械手传动连接,机械手安装架设有弧形轨道,插片机械手与弧形轨道滑动配合;机械手开合控制装置包括开合安装架、与开合安装架固定连接的开合电机、与开
合电机驱动连接的开合升降结构、与开合升降结构固定连接的开合控制块,插片机械手设有开合松紧夹,开合控制块与开合松紧夹接触配合;还包括进料切料装置,进料切料装置包括切料电机和切料电机驱动的切料升降台,切料升降台底部设有切料模具,进料口设于切料升降台底部。
8.本发明花叶轮排片插片结构,通过优化机械手的传动和运动轨迹结构,采用齿轮齿条精准控制转动角度和轨迹,通过弧形轨道配合插片机械手实现插片机械手轨迹的优化,插片机械手取料夹整体转动角度小于90
°
,移动的距离较小,运动轨迹稳定,提高了插片效率;通过设置开合电机驱动开合控制块的升降,即可实现插片机械手在取料、插片动作时开合控制,结构精简有效,还同时可通过电机参数设置匹配开合控制块不同的升降频率,以配合不同轨迹的升降机械手的动作。
9.在一些实施方式中,插片机械手包括机械手传动臂,机械手传动臂两端分别设有取料夹和机械手固定座,机械手固定座与机械手齿轮固定连接,机械手固定座与机械手安装架转动连接。通过机械手齿轮带动机械手固定座,实现插片机械手的运动驱动。
10.在一些实施方式中,机械手固定座设有与其固定连接的机械手固定轴,机械手固定轴与弧形轨道滑动配合。设置机械手固定轴,让机械手固定轴沿弧形轨道滑动,确保了插片机械手的运动轨迹,确保了运动稳定性。
11.在一些实施方式中,机械手齿条一端与偏心传动块一端活动铆接,机械手齿条由偏心传动块带动做水平往复运动。采用偏心传动块的转动带动机械手齿条,传动结构稳定。
12.在一些实施方式中,机械手齿条设于机械手齿轮底部并啮合传动,机械手齿轮下方设有齿条限位台,机械手齿条设于齿条限位台与机械手齿轮之间,机械手齿条与齿条限位台滑动配合。通过设置齿条限位台,确保了机械手齿条运动轨迹的稳定性,不会松动偏离。
13.在一些实施方式中,弧形轨道的弧形轨迹为255
°
。弧形轨道的整体弧形轨迹角度为255
°
,机械手齿轮和机械手固定座转动角度为255
°
,带动的插片机械手转动不到90
°
。
14.在一些实施方式中,机械手传动臂设有传动臂限位座,传动臂限位座与机械手安装架活动铆接,传动臂限位座设有传动臂限位槽,传动臂限位槽与机械手传动臂限位滑动配合。设置传动臂限位座,确保机械手传动臂的运动轨迹,保证了运动行程的稳定性。
15.在一些实施方式中,开合控制块包括上控制块和下控制块,上控制块与下控制块之间设有升降滑座。设置上下控制块,分别用于取料动作和插片动作,同时设置升降滑座同步联动,即实现一个电机驱动升降滑座即可同时调节上下控制块位置。
16.在一些实施方式中,开合升降结构包括与开合电机驱动连接的开合凸轮、与开合凸轮传动配合的升降传动块,升降传动块与升降滑座固定连接。通过开合凸轮实现升降传动块的升降动作,结构简单有效。
17.在一些实施方式中,开合升降结构包括升降限位座,升降限位座与开合安装架固定连接,升降滑座与升降限位座限位滑动。设置升降限位座,限位升降滑座的滑动轨迹,避免出现侧方向的偏移。
18.在一些实施方式中,上控制块两侧设有上控制作用部,下控制块两侧设有下控制作用部,上控制作用部与下控制作用部分别与开合松紧夹接触配合。设置上下控制作用部,精准匹配开合松紧夹,方便控制。
19.在一些实施方式中,上控制作用部与开合松紧夹接触面为水平倾斜设置,下控制作用部与开合松紧夹接触面为纵向倾斜设置。限定上下控制作用部的接触面方向,取料时,开合松紧夹要求变为水平倾斜方向位置,插片时,开合松紧夹要求变为立向倾斜方向。
20.在一些实施方式中,升降滑座上设有取料台,取料台与进料口匹配设置。设置取料台,通过取料台接收进料口进入的切好的花叶轮叶片,并通过升降滑座的上下升降实现进入取料台的花叶轮叶片与进料口分离,实现掰料效果。
21.在一些实施方式中,取料台设有用于放置花叶轮叶片取料槽。通过取料槽让花叶轮叶片进入,确保了掰料的效果,同时取料槽的设置配合插片机械手的动作,确定了取料位置。
22.本发明的有益效果为:本发明花叶轮叶片切割及插片装置,通过伺偏心传动块将机械手电机旋转运动的驱动转换为水平方向运动,并驱动机械手齿条水平方向往复运动,通过机械手齿条和机械手齿轮的啮合带动插片机械手的转动,驱动结构精准且稳定;插片机械手设置的在弧形轨道内滑动,该滑动轨迹缩减了取料夹的运动行程距离,加强了取料至插片的整体效率;通过设置开合电机驱动开合升降结构的升降,在开合升降结构上设置开合控制块,实现在取料动作和插片动作时插片机械手上开合松紧夹的松紧控制;同时在开合升降结构上设置取料台,实现掰料动作,整体结构只需采用一个电机驱动,大大精简了整体结构,减少了电机成本和结构成本。
附图说明
23.图1为本发明花叶轮叶片切割及插片装置插片机械手插片状态的结构示意图;图2为图1取料状态的结构示意图;图3为本发明插片机械手和机械手驱动结构部分的结构示意图;图4为图3的背面结构示意图;图5为本发明机械手开合控制装置的结构示意图;图6为图5的正面结构示意图;图7为本发明进料切料装置的结构示意图;图8为图7的背面结构示意图。
具体实施方式
24.下面结合附图对本发明作进一步详细的说明。
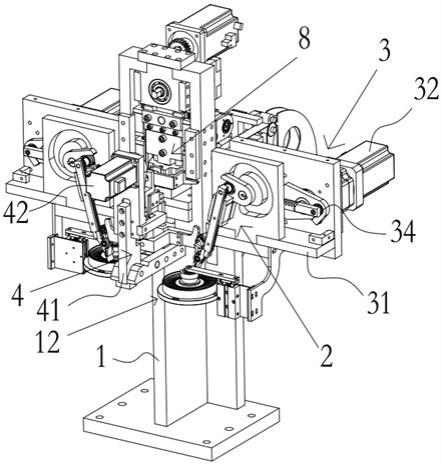
25.实施例如图1、2所示,花叶轮叶片切割及插片装置,包括机架1及机架1上的进料口11和放料区12,机架1上设有左右对称设置的插片机械手2,插片机械手2由进料口11至放料区12做往返周期弧形运动,还包括与插片机械手2驱动连接的机械手驱动结构3、与插片机械手2动作配合的机械手开合控制装置4以及进料切料装置8。
26.如图3、4所示,机械手驱动结构3包括机械手安装架31、与机械手安装架31固定安装的机械手电机32、与机械手电机32驱动连接的电机传动块33、与电机传动块33偏心设置的偏心传动块34、与偏心传动块34传动配合的机械手齿条35、与机械手齿条35啮合的机械手齿轮36,机械手齿轮36与插片机械手2传动连接,机械手安装架31设有弧形轨道37,插片
机械手2与弧形轨道37滑动配合。
27.插片机械手2包括机械手传动臂21,机械手传动臂21两端分别设有取料夹22和机械手固定座23,机械手固定座23与机械手齿轮36固定连接,机械手固定座23与机械手安装架31转动连接。
28.机械手固定座23设有与其固定连接的机械手固定轴24,机械手固定轴24与弧形轨道37滑动配合。
29.机械手齿条35一端与偏心传动块34一端活动铆接,机械手齿条35由偏心传动块34带动做水平往复运动。
30.机械手齿条35设于机械手齿轮36底部并啮合传动,机械手齿轮36下方设有齿条限位台38,机械手齿条35设于齿条限位台38与机械手齿轮36之间,机械手齿条35与齿条限位台38滑动配合。
31.弧形轨道37的弧形轨迹为255
°
。
32.机械手传动臂21设有传动臂限位座25,传动臂限位座25与机械手安装架31活动铆接,传动臂限位座25设有传动臂限位槽26,传动臂限位槽26与机械手传动臂21限位滑动配合。
33.插片机械手2插片动作和取料动作原理如下:以右侧的插片机械手为例,如图2所示,插片机械手2呈水平,处于取料状态,此时插片机械手2处于弧形轨道37下方尽头,取料夹22处于取料口11,取料夹22抓取进料口11的切割后的花叶轮叶片,完成取料动作;机械手电机32驱动电机传动块33转动,电机传动块33由于与偏心传动块34偏心铆接,电机传动块33带动偏心传动块34偏心转动,偏心传动块34一端与机械手齿条35活动铆接,随着偏心传动块34的转动,带动机械手齿条35向右水平运动,机械手齿条35啮合带动机械手齿轮36逆时针转动,机械手齿轮36与机械手固定座23同轴传动并带动机械手固定座23逆时针同步转动;由于机械手固定座23与机械手固定轴24固定连接,由此带动机械手传动臂21转动,机械手传动臂21转动过程中,受传动臂限位座25的限位,带动传动臂限位座25转动的同时也通过传动臂限位槽26相互滑动。偏心传动块34转动180
°
时,机械手固定轴24移动到弧形轨道37左侧尽头处,处于放料状态,此时取料夹22运动至放料区12,将花叶轮叶片插入至放料区12的插盘内,完成插片动作。
34.机械手电机32继续转动,此时偏心传动块34带动机械手齿条35向左水平运动,机械手齿轮36顺时针转动,基于上述的传动结构,使得机械手固定轴24沿着弧形轨道37顺时针方向移动,实现插片机械手2向进料区运动,直至取料夹22到达进料口11,完成一个动作循环。
35.如图5、6所示,机械手开合控制装置4包括开合安装架41、与开合安装架41固定连接的开合电机42、与开合电机42驱动连接的开合升降结构5、与开合升降结构5固定连接的开合控制块6,插片机械手2设有开合松紧夹27,开合控制块6与开合松紧夹27接触配合。
36.开合控制块6包括上控制块61和下控制块62,上控制块61与下控制块62之间设有升降滑座63。
37.上控制块61两侧设有上控制作用部64,下控制块62两侧设有下控制作用部65,上控制作用部64与下控制作用部65分别与开合松紧夹27接触配合。
38.上控制作用部64与开合松紧夹27接触面为水平倾斜设置,下控制作用部65与开合
松紧夹27接触面为纵向倾斜设置。
39.开合升降结构5包括与开合电机42驱动连接的开合凸轮51、与开合凸轮51传动配合的升降传动块52,升降传动块52与升降滑座63固定连接。
40.开合升降结构5还包括升降限位座53,升降限位座53与开合安装架41固定连接,升降滑座63与升降限位座53限位滑动。
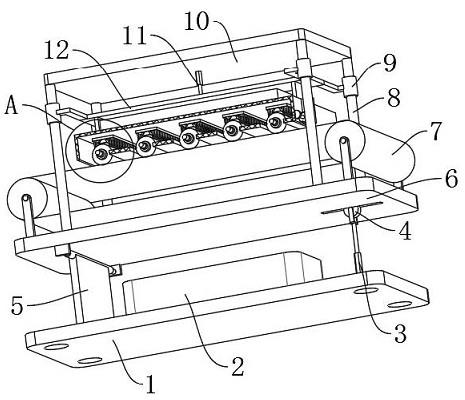
41.升降滑座63上设有取料台7,取料台7与进料口11位置匹配设置。
42.取料台7设有用于放置花叶轮叶片的取料槽71。
43.机械手开合控制装置4配合插片机械手2工作时:如图1所示,此时为插片机械手2插片动作状态,此时下控制作用部65与开合松紧夹27接触,使得插片机械手2的取料夹打开,插片机械手2内的原夹持的花叶轮叶片脱离插片机械手2,完成插片,此时开合凸轮51上表面为较低面,升降传动块52处于最低位置,即下控制作用部65也处于最低位置。
44.随后开合电机42驱动开合凸轮51转动,开合凸轮51上表面变高,随之带动升降传动块52上升,升降传动块52带动升降滑座63上升,升降滑座63上升过程中与升降限位座53限位滑动,升降滑座63同时带动上控制块61和下控制块62上升,下控制块62的下控制作用部65与开合松紧夹27脱离,直至开合凸轮51上表面为最凸点,即升降滑座63到达最高点;此时插片机械手2也运动至取料区,如图2所示,开合松紧夹27与上控制作用部64接触,并使得插片机械手2的取料夹打开,取料夹夹取处于取料槽71内的切割好的花叶轮叶片,完成取料;插片机械手2继续向放料区12运动,上控制作用部64与开合松紧夹27脱离,取料夹夹紧花叶轮叶片,开合电机42同时继续转动,由于开合凸轮51上表面高度下降,升降滑座63下降,取料台7也随之下降,自然完成掰料过程。
45.直至插片机械手2回到如图1所示的位置,即进行插片动作,升降滑座63也下降至最低点,完成一个动作循环。
46.开合电机42驱动机械手开合控制装置4升降的周期频率与插片机械手2的运动周期频率相匹配,即完成很好的控制配合。
47.如图7、8所示,进料切料装置8,进料切料装置8包括切料电机81和切料电机81驱动的切料升降台82,切料升降台82底部设有切料模具83,进料口11设于切料升降台82底部。
48.切料电机81驱动切料齿轮转动,通过两个切料齿轮的啮合,进行切料电机81的动力传递,切料齿轮内连接有切料凸轮,通过切料凸轮与切料升降台82的配合,转换切料齿轮传动的转动动力为升降动力,继而带动切料升降台82的升降运动,切料模具83设置有切料刀具,切料刀具与砂带的压切面为“z”形,通过升降压切进料的砂带,切出带缺口的花叶轮叶片,并自进料口11输出至取料台7的取料槽71内,供插片机械手2取料。
49.以上所述的仅是本发明的一些实施方式。对于本领域的普通技术人员来说,在不脱离本发明创造构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。