1.本发明涉及一种非破坏式的、用于前轮转弯超行程的保护装置,更具体地,涉及一种能实现转弯系统的自动断开且易于恢复到初始状态的、用于前轮转弯超行程的保护装置。
背景技术:
2.民用飞机在前轮转弯时,如果超过行程,可能会导致前起落架自身结构的破坏,因此,在前轮转弯达到临界角度时,需要自动断开转弯系统,并通过指示系统向飞行员或机务人员指示这一状态。不仅如此,在自动断开转弯系统之后,还同时需要通过机械机构将该断开状态保持住,以避免因重新上电后误操作。此时,必须经维护人员现场检查,并且确认维护无误后,再重新上电使转弯系统恢复到初始状态。
3.现行的部分飞机的用于前轮转弯超行程的保护装置被设计为结构破坏式的装置,当转弯角度超过临界值时,通过顶杆碰撞安装有行程传感器的标靶的耳片,使耳片被外力剪断,标靶脱离行程传感器,行程传感器向飞行员或机务报警。
4.但是,一旦用于前轮转弯超行程的保护装置被设计为结构破坏式的装置,则结构发生破坏后,需要人工更换新的结构。后期人力恢复保护装置时需要花费大量的时间更换耳片,维护麻烦,造成人力和材料的浪费。另外,由于采用的是结构破坏式的装置,因此,为了在转弯角度超过临界值时易于被破坏,连接点设计强度通常较低,此时,风或震动疲劳容易导致结构破坏,由此触发误报警。
5.例如,在中国发明专利cn103090838b中,提供了一种非破坏式的飞机转弯过行程检测装置,即用于前轮转弯超行程的保护装置,其包括:过行程顶杆,所述过行程顶杆安装在飞机前起落架转弯动作套筒的旋转部分上,并随着所述旋转部分的旋转而旋转;以及检测组件,所述检测组件安装在飞机前起落架转弯动作套筒的静止部分上。所述检测组件包括:标靶;接近传感器,所述接近传感器用于检测所述标靶的位置,并固定在所述静止部分上;套筒,所述套筒位于所述标靶的下方,并固定在所述静止部分上;储能弹簧,所述储能弹簧位于所述套筒内并处于压缩状态;连杆,所述连杆的一端穿过所述套筒的底部和所述储能弹簧并与所述标靶连接,另一端具有锁扣部;以及联动卡勾,所述联动卡勾与所述连杆的锁扣部相锁扣,并固定在所述静止部分上。当发生转弯过行程时,所述过行程顶杆打开所述联动卡勾以松开所述连杆,所述连杆在所述储能弹簧的作用下带动所述标靶朝向所述接近传感器运动,所述接近传感器检测到所述标靶的位置,并发送信号到飞机控制系统。即,在上述现有技术中,通过储能弹簧、联动卡勾、接近传感器等零部件的配合工作,实现了对转弯机构超行程的检测与告警。
6.但是,这种结构的飞机转弯过行程检测装置在工作过程中连杆或者说标靶会对接近传感器产生撞击,容易导致接近传感器受损破坏,同时在工作过程中连杆可能产生振荡,导致检测不准确而产生误判。
7.因此,如何提供一种在使用过程中无需更换零件、材料浪费少,维护的材料成本和
时间成本均小,并同时具有结构稳定、动作可靠,易于检测且检测准确性高、误报警可能性小的优势的用于前轮转弯超行程的、非破坏式的保护装置,便成为亟待解决的技术问题。
技术实现要素:
8.本发明为解决上述技术问题而作,其目的在于提供一种用于前轮转弯超行程的保护装置,其是非破坏式的保护装置,在使用过程中无需更换零件,材料浪费少,维护的材料成本和时间成本均小,并且结构稳定,操作简单,动作可靠,易于检测且检测准确性高,误报警可能性小。
9.为了实现上述发明目的,本发明提供一种用于前轮转弯超行程的保护装置,其特征是,包括:行程传感器,所述行程传感器以使所述行程传感器的感测部面向被感测体的被感测面的方式固定;锁定机构,所述锁定机构在两侧分别具有呈筒状的锁定套筒、呈中空筒状的锁定滑块、锁定顶块,所述锁定滑块部分地形成在所述锁定套筒的内部且能在所述锁定套筒的内部滑动,所述锁定顶块以两端均从所述锁定滑块的内部伸出的方式形成于所述锁定滑块的内周侧;以及连杆机构,所述连杆机构活动连接于所述锁定机构,并具有运动连杆和用于安装并固定所述被感测体的被感测体固定板,在所述锁定滑块从中间位置向两侧弹出时,所述锁定滑块与所述锁定套筒分开且未锁紧,安装并固定在所述连杆机构的所述被感测体固定板上的所述被感测体处于所述行程传感器能感测的范围内,在所述锁定滑块受力而被压紧时,所述锁定滑块相对于所述锁定套筒向中间滑动,所述连杆机构发生偏移,安装并固定在所述连杆机构的所述被感测体固定板上的所述被感测体处于所述行程传感器能感测的范围外,通过由所述锁定套筒和所述锁定滑块所形成的锁定结构,将所述锁定滑块相对于所述锁定套筒锁紧,以限制锁定滑块向两侧滑动,并保持所述被感测体处于所述行程传感器能感测的范围外。
10.根据如上所述构成,由于在所述锁定滑块从中间位置向两侧弹出时,所述锁定滑块与所述锁定套筒分开且未锁紧,在所述锁定滑块受力而被压紧时,通过由所述锁定套筒和所述锁定滑块所形成的锁定结构,将所述锁定滑块相对于所述锁定套筒锁紧,因此,能在被感测体(标靶)与行程传感器之间的接近、脱离状态进行可靠地切换,避免判断时因在接近状态与脱离状态反复的振荡摆动导致的误判,从而能够提高飞行的安全性。
11.另外,由于使用了具有运动连杆和用于安装并固定所述被感测体的被感测体固定板的连杆机构,并且正常工作状态(接近状态)下,安装并固定在所述连杆机构的所述被感测体固定板上的所述被感测体处于所述行程传感器能感测的范围内,而在非正常工作状态(脱离状态)下,所述连杆机构发生偏移,安装并固定在所述连杆机构的所述被感测体固定板上的所述被感测体处于所述行程传感器能感测的范围外,因此,能利用连杆机构将水平运动转换为旋转偏移运动,使得被感测体(标靶)与行程传感器的间距确定可控。
12.再者,由于是对结构件自身不造成损伤的无破坏性检测保护,因此,减少了频繁更换零件造成的材料浪费,也减少了更换零件的人力成本。
13.优选的是,所述运动连杆的一端活动连接于一侧的所述锁定机构的所述锁定滑块,所述被感测体固定板的一端活动连接于另一侧的所述锁定机构的所述锁定滑块,所述运动连杆的另一端与所述被感测体固定板的另一端活动连接。
14.根据如上所述构成,通过铰链方式将运动连杆的两端与其他部件连接,从而能灵
活地实现水平运动向旋转偏移运动的转换。
15.优选的是,所述保护装置包括安装座,所述安装座安装在前起落架转弯的静止部分,并对所述行程传感器和用于安装所述锁定机构的安装板进行固定。
16.根据如上所述构成,通过将保护装置安装于前起落架转弯的静止部分,从而使该保护装置处于一固定的位置,进而能通过安装在前起落架转弯的运动部分处的前轮转动部对该保护装置的施力,来使保护装置相应地起到保护作用,避免前轮转弯时超过行程。
17.优选的是,所述锁定机构是棘轮机构,所述棘轮机构具有棘轮套筒、棘轮滑块、棘轮顶块,所述棘轮机构从左右两侧安装在所述安装板的中间通孔处,弹簧穿过所述中间通孔与左右两侧的所述棘轮机构的所述棘轮顶块连接。
18.根据如上所述构成,棘轮机构的应用使得装置操作使用简单,维护人员易于对装置进行维护。
19.此外,所述棘轮顶块在远离所述安装板一侧、即顶压侧的端部具有向所述顶压侧凸出的被顶压凸部,所述棘轮滑块的内周面与所述棘轮顶块的外周面之间形成抵靠结构,在一侧的所述被顶压凸部被顶压时,该侧的所述锁定顶块通过所述抵靠结构推动该侧的所述锁定滑块向中间滑动。另外,所述棘轮滑块在靠所述安装板一侧的端部具有向所述棘轮滑块的外周突出的外凸缘部,所述锁定顶块在靠所述安装板一侧的端部具有向所述棘轮顶块的外周突出的外凸缘部,在一侧的所述被顶压凸部被顶压时,另一侧的所述锁定顶块的外凸缘部与另一侧的所述棘轮滑块的外凸缘部抵接。另外,所述棘轮滑块在所述顶压侧的端部具有向所述棘轮滑块的外周突出的运动机构连接部,所述运动机构连接部与所述连杆机构的所述运动连杆和所述被感测体固定板铰链连接。另外,所述棘轮滑块的所述运动机构连接部向外周突出的量大于所述棘轮滑块的外凸缘部向外周突出的量。
20.通过如上所述构成,在棘轮机构的动作过程中,一方面能在棘轮顶块受力时,通过抵靠结构推动锁定滑块向中间滑动,进而使与棘轮滑块的运动机构连接部铰链连接的运动连杆发生运动,另一方面能避免另一侧的锁定顶块被相对于锁定滑块推出。
21.优选的是,所述棘轮套筒在远离所述安装板一侧的端部、即顶压侧具有向所述棘轮套筒的内周突出的内凸缘部,所述棘轮套筒的内凸缘部位于所述棘轮滑块的运动机构连接部与所述棘轮滑块的外凸缘部之间,所述棘轮套筒的内凸缘部与所述棘轮滑块的外凸缘部形成所述锁定结构。
22.根据如上所述构成,在前起落架向左或是向右转动至临界角度,能利用所述棘轮套筒的内凸缘部与所述棘轮滑块的外凸缘部形成所述锁定结构保持在非正常工作状态(脱离状态),避免其在未现场确认后从非正常工作状态(脱离状态)回到正常工作状态(接近状态),从而能确保飞行安全的可靠性。
23.作为一个实例,在前起落架未向左和向右中的任一个方向转动至临界角度的情况下,用于前轮转弯超行程的保护装置处于正常工作状态,所述棘轮机构的所述棘轮滑块处于与所述棘轮套筒分开的非锁紧状态,所述被感测体固定板处于水平位置,使得位于所述被感测体固定板上的所述被感测体的被感测面靠近所述行程传感器的感测部并处于感测范围内,在前起落架向左或右的一侧转动至临界角度的情况下,用于前轮转弯超行程的保护装置处于非正常工作状态,所述前起落架向所述一侧转动至临界角度带动着安装在前起落架转弯的运动部分处的前轮转动部顶块顶压位于与所述一侧相反的另一侧的所述棘轮
机构的所述棘轮顶块,并利用抵靠结构使位于所述另一侧的棘轮滑块向所述一侧滑动,使得通过铰链方式连接的所述运动连杆向所述另一侧生转动,以使所述被感测体固定板发生偏转,进而使安装并固定于所述被感测体固定板的所述被感测体的所述被感测面在所述另一侧远离所述行程传感器的所述感测部而处于感测范围外,所述行程传感器立即切断前轮转弯系统。更进一步地,在用于前轮转弯超行程的保护装置处于非正常工作状态时,利用所述锁定结构使得另一侧的所述棘轮滑块相对于所述棘轮套筒被锁住,在确认具备恢复条件后,通过手动按压另一侧的所述棘轮顶块,使另一侧的所述棘轮滑块能相对于所述棘轮套筒弹出,所述运动连杆发生转动而使所述被感测体固定板转动回到水平位置,使得所述前轮转弯系统回到所述正常工作状态。
24.根据如上所述构成,本发明的用于前轮转弯超行程的保护装置由于易于对前起落架超行程的状态进行检测保护,且不会对结构自身造成损伤,因此,在使用过程中无需更换零件,材料浪费少,维护的材料成本和时间成本均小。
25.另外,根据如上所述构成,本发明的用于前轮转弯超行程的保护装置在一旦发生超行程行为后,不会自行复位,必须由机务人员到现场确认、维护并只需通过手动复位即可使前轮转弯系统恢复正常工作,因此,结构稳定,操作简单,动作可靠,并且检测准确性高,误报警可能性小。
26.除此之外,本发明的用于前轮转弯超行程的保护装置能够应用于不同机型的前轮转弯超行程的检测中,应用范围广。
附图说明
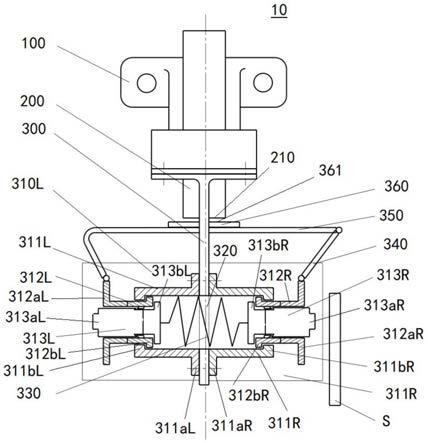
27.图1是本发明一实施方式的用于前轮转弯超行程的保护装置的正常工作状态的结构示意图,所述正常工作状态是标靶位于与行程传感器接近的接近位置时的状态。
28.图2是本发明一实施方式的用于前轮转弯超行程的保护装置的非正常工作状态(第一脱离状态)结构示意图,所述非正常工作状态(第一脱离状态)是标靶位于在右侧远离行程传感器的右侧脱离位置时的状态。
29.图3是本发明一实施方式的用于前轮转弯超行程的保护装置的非正常工作状态(第二脱离状态)结构示意图,所述非正常工作状态(第二脱离状态)是标靶位于在左侧远离行程传感器的左侧脱离位置时的状态。(符号说明)
30.10
ꢀꢀꢀꢀ
保护装置;100
ꢀꢀꢀ
安装座;200
ꢀꢀꢀ
行程传感器;210
ꢀꢀꢀ
感测部;300
ꢀꢀꢀ
棘轮机构安装板;310l
ꢀꢀ
左棘轮机构;311l
ꢀꢀ
左棘轮套筒;311al 外凸缘部;311bl 内凸缘部;312l
ꢀꢀ
左棘轮滑块;
312al 运动机构连接部;312bl 外凸缘部;313l
ꢀꢀ
左棘轮顶块;313al 被顶压凸部;313bl 外凸缘部;310r
ꢀꢀ
右棘轮机构;311r
ꢀꢀ
右棘轮套筒;311ar 外凸缘部;311br 内凸缘部;312r
ꢀꢀ
右棘轮滑块;312ar 运动机构连接部;312br 外凸缘部;313r
ꢀꢀ
右棘轮顶块;313ar 被顶压凸部;313br 外凸缘部;320
ꢀꢀꢀ
中间通孔;330
ꢀꢀꢀ
弹簧;340
ꢀꢀꢀ
运动连杆;350
ꢀꢀꢀ
标靶固定板;360
ꢀꢀꢀ
标靶;361
ꢀꢀꢀ
被感测面;a
ꢀꢀꢀꢀꢀ
棘轮结构;b
ꢀꢀꢀꢀꢀ
抵靠结构;s
ꢀꢀꢀꢀꢀ
前轮转动部顶块。
具体实施方式
31.以下,参考图1至图3,对本发明一实施方式的用于前轮转弯超行程的保护装置100的结构以及不同的状态进行说明。
32.另外,图1至图3所描述的是本发明的优选的实施方式,其仅为了示例性地说明用于实施和使用本发明的一个特定的方式,并不旨在限制本发明的范围。
33.如图1所示,本发明一实施方式的用于前轮转弯超行程的保护装置10包括安装座100,所述安装座100安装在前起落架转弯的静止部分(未图示),其安装方式可以是现有的民用飞机中所采用的安装方式,因此,对于具体安装方式,在此处不予详细描述。
34.用于前轮转弯超行程的保护装置10的安装座100主要用于对行程传感器200和棘轮机构安装板300进行固定。
35.更具体地,如图1所示,所述行程传感器200以使所述行程传感器200的感测部210面向后面描述的标靶360的被感测面361的方式固定于安装座100。
36.另外,如图1所示,在所述棘轮机构安装板300上安装有位于图1中左侧的左棘轮机构310l和位于图1中右侧的右棘轮机构310r,所述左棘轮机构310l和所述右棘轮机构310r
分别从图1中的左右方向安装在棘轮机构安装板300的中间通孔320处。
37.所述左棘轮机构310l由左棘轮套筒311l、左棘轮滑块312l、左棘轮顶块313l构成。
38.所述左棘轮套筒311l呈筒状,在靠所述棘轮机构安装板300一侧(图1的中间侧,即安装侧)的端部具有向所述左棘轮套筒311l的外周突出的外凸缘部311al,在远离所述棘轮机构安装板300一侧(图1中的左侧,即顶压侧)的端部具有向所述左棘轮套筒311l的内周突出的内凸缘部311bl。
39.所述左棘轮滑块312l呈中空的筒状,在远离所述棘轮机构安装板300一侧(图1中的左侧,即顶压侧)的端部具有向所述左棘轮滑块312l的外周突出的运动机构连接部(其是外凸缘部)312al,在靠所述棘轮机构安装板300一侧(图1的中间侧,即安装侧)的端部具有向所述左棘轮滑块312l的外周突出的外凸缘部312bl,运动机构连接部(外凸缘部)312al向外周突出的量大于外凸缘部312bl向外周突出的量。所述左棘轮套筒311l的内凸缘部311bl位于所述左棘轮滑块312l的运动机构连接部(外凸缘部)312al与外凸缘部312bl之间,并且所述左棘轮套筒311l的内凸缘部311bl与所述左棘轮滑块312l的运动机构连接部(外凸缘部)312al和外凸缘部312bl间的部分之间形成作为锁定结构的棘轮结构a(参见图2、图3)。
40.所述左棘轮顶块313l以两端在图1的左右方向上均从所述左棘轮滑块312l伸出的方式形成于所述左棘轮滑块312l的内周侧。所述左棘轮顶块313l的远离所述棘轮机构安装板300一侧(图1中的左侧,即顶压侧)的端部具有向顶压侧凸出的被顶压凸部313al,在靠所述棘轮机构安装板300一侧(图1的中间侧,即安装侧)的端部具有向所述左棘轮顶块313l的外周突出的外凸缘部313bl,所述左棘轮顶块313l的所述外凸缘部313bl能与所述左棘轮滑块312l的外凸缘部312bl抵靠,以防止所述左棘轮顶块313l从所述左棘轮滑块312l的内周侧脱出。另外,并且左棘轮滑块312l的内周面与所述左棘轮顶块313l的外周面之间形成抵靠结构b(参见图2、图3),以使所述左棘轮顶块313l被按压时能进一步推动右棘轮滑块312r向左滑动。
41.所述左棘轮机构310l在左棘轮滑块312l弹出时,左棘轮滑块312l与所述左棘轮套筒311l分开(非锁紧),相反,在左棘轮滑块312l受力而被压紧时,左棘轮滑块312l相对于所述左棘轮套筒311l滑动且通过所述棘轮结构a将左棘轮滑块312l锁住,以限制左棘轮滑块312l的滑动。
42.如图1所示,所述右棘轮机构310r与所述左棘轮机构310l同样地,由右棘轮套筒311r、右棘轮滑块312r、右棘轮顶块313r构成。右棘轮套筒311r、右棘轮滑块312r和右棘轮顶块313r与左棘轮套筒311l、左棘轮滑块312l和左棘轮顶块313l除了左右方向相反之外,具有同样的结构。另外,所述右棘轮机构310r与所述左棘轮机构310l除了运动的方向相反之外,具有同样的动作方式。
43.另外,如图1所示,在所述左棘轮机构310l与所述右棘轮机构310r之间安装有穿过中间通孔320的弹簧330,弹簧330的一端与所述左棘轮机构310l的所述左棘轮顶块313l的靠所述棘轮机构安装板300一侧(图1的中间侧,即安装侧)的端部连接,另一端与所述右棘轮机构310r的所述右棘轮顶块313r的靠所述棘轮机构安装板300一侧(图1的中间侧,即安装侧)的端部连接。
44.在所述左棘轮机构310l的左棘轮滑块312l和所述右棘轮机构310r的右棘轮滑块312r各自的运动机构连接部312al、312ar上,分别通过铰链方式连接有运动连杆340和标靶
固定板350。更具体地,例如,如图1所示,所述运动连杆340的一端通过铰链方式与所述左棘轮滑块312l的运动机构连接部312al连接,所述标靶固定板350的一端通过铰链方式与所述右棘轮滑块312r的运动机构连接部312ar连接,所述运动连杆340的另一端与所述标靶固定板350的另一端通过铰链方式连接。在所述标靶固定板350上安装并固定有标靶360。
45.接着,对用于前轮转弯超行程的保护装置100的正常工作状态和非正常工作状态(第一脱离状态、第二脱离状态)的情况进行说明。
46.图1是用于前轮转弯超行程的保护装置100的正常工作状态的结构示意图,所述正常工作状态是标靶360位于与行程传感器200接近的接近位置时的状态。此时,所述左棘轮机构310l的左棘轮滑块312l处于与所述左棘轮套筒311l分开(非锁紧)的状态,而所述右棘轮机构310r的右棘轮滑块312r处于相对于所述右棘轮套筒311r弹开的状态,标靶固定板350处于水平位置,使得位于标靶固定板350上的标靶360的被感测面361靠近行程传感器200的感测部210并处于感测范围内,由此判断为前轮转弯系统正常工作,前轮可以正常转弯。
47.图2是前起落架向左转动达到临界角度时各结构位置示意图,用于前轮转弯超行程的保护装置100处于标靶360在右侧远离行程传感器200的非正常工作状态(第一脱离状态)。此时,前起落架向左转动至临界角度带动着安装在前起落架转弯的运动部分处的前轮转动部顶块s顶压右棘轮顶块313r,并利用抵靠结构b进一步使得右棘轮滑块312r向左滑动。随着右棘轮滑块312r向左滑动,通过铰链方式连接在运动机构连接部312ar上的运动连杆340向右侧发生转动,并使得标靶固定板350也发生了偏转,从而使得安装并固定于标靶固定板350的标靶360的被感测面361在右侧远离行程传感器200的感测部210而处于感测范围外。行程传感器200立即向驾驶舱发出告警,并同时切断前轮转弯系统。另外,此时,由于利用棘轮结构a使得右棘轮滑块312r相对于右棘轮套筒311r被锁住,因此,无法自行解除锁定。后期需要机务人员到现场进行维护,观察现场具备恢复条件后,手动按压右棘轮顶块313r,使右棘轮滑块312r能相对于右棘轮套筒311r弹出,这时,随着右棘轮滑块312r的弹出,运动连杆340向左侧发生转动,且标靶固定板350向左侧转动回到水平位置,标靶360的被感测面361靠近行程传感器200的感测部210并处于感测范围内,由此前轮转弯系统重新回到正常工作状态。
48.图3是前起落架向右转动达到临界角度时各结构位置示意图,用于前轮转弯超行程的保护装置100处于标靶360在左侧远离行程传感器200的非正常工作状态(第二脱离状态)。此时,前起落架向右转动至临界角度带动着安装在前起落架转弯的运动部分处的前轮转动部顶块s顶压左棘轮顶块313l,并利用抵靠结构b进一步使得左棘轮滑块312l向左滑动。随着左棘轮滑块312l向右滑动,通过铰链方式连接在运动机构连接部312al上的标靶固定板350向左侧发生了偏转,并使运动连杆340向左侧发生转动,从而使得安装并固定于标靶固定板350的标靶360的被感测面361在左侧远离行程传感器200的感测部210而处于感测范围外。行程传感器200立即向驾驶舱发出告警,并同时切断前轮转弯系统。另外,此时,由于利用棘轮结构a使得左棘轮滑块312l相对于左棘轮套筒311l被锁住,因此,无法自行解除锁定。后期需要机务人员到现场进行维护,观察现场具备恢复条件后,手动按压左棘轮顶块313l,使左棘轮滑块312l能相对于左棘轮套筒311l弹出,这时,随着左棘轮滑块312l的弹出,标靶固定板350向右侧转动回到水平位置,且运动连杆340向右侧发生转动,标靶360的
被感测面361靠近行程传感器200的感测部210并处于感测范围内,由此前轮转弯系统重新回到正常工作状态。
49.在本发明一实施方式中,需要注意以下几个方面:
50.·
第一,运动连杆340和标靶固定板350的长度需合理且正确地设计,使得标靶360能够在作为正常工作状态的接近状态下处于行程传感器200的检测范围内,并且在作为非正常工作状态的第一脱离状态及第二脱离状态下脱离行程传感器200的检测范围;
51.·
第二,所述左棘轮机构310l和所述右棘轮机构310r的设计需合理,使得左棘轮滑块312l及右棘轮滑块312r分别能相对于左棘轮套筒311l及右棘轮套筒311r牢固地锁定且能通过手动按压容易对弹出。
52.熟悉本领域的技术人员易于想到其它的优点和修改。因此,在其更宽泛的上来说,本发明并不局限于这里所示和所描述的具体细节和代表性实施例。因此,可以在不脱离如所附权利要求书及其等价物所限定的总体发明概念的精神或范围的前提下做出修改。
53.例如,在本发明中,作为锁定机构,以棘轮结构a为例进行了说明,但本发明不局限于此,也可以使用其他常见的能防止脱开的锁定机构,例如,在一方的构件上设置有卡合部而在另一方的构件上设置被卡合部的卡合结构,或是在一方的构件上设置钩之类的钩挂部而在另一方的构件上设置孔之类的被钩挂部的钩挂结构等。
54.又例如,在本发明中,以具有运动连杆和用于安装并固定所述被感测体的被感测体固定板的连杆机构为例进行了说明,但本发明不局限于此,只要是能实现将水平运动转换为旋转偏移运动的机构,其均能视为是本发明所称的连杆机构,而该机构中起到安装并固定被感测体(例如标靶)的部件均能视为是本发明所称的被感测体固定板,该机构中起到运动作用的部件,无论结构如何复杂或是简易,均能视为是本发明所称的运动连杆。另外,在本发明中,以连杆机构具有一根运动连杆和一块被感测体固定板为例进行了说明,但本发明的连杆机构也可以具有两根以上的运动连杆,此时,在例如两根运动连杆的情况下,两根运动连杆各自的一端与运动机构连接部铰链连接,而各自的另一端分别与被感测体固定板的两端铰链连接。
55.再例如,在本发明中,以用于前轮转弯超行程的保护装置10包括棘轮机构(左棘轮机构310l和所述右棘轮机构310r)为例进行了说明,但本发明不局限于此,在未使用棘轮结构而是使用卡合结构或是钩挂结构等其他锁定结构实现锁紧的情况下,用于前轮转弯超行程的保护装置10包括具有相应结构(即,锁定套筒、锁定滑块、锁定顶块)的锁定机构,此时,锁定机构能在从中间位置向左移动某一行程时和向右移动某一行程时被锁定,并且能通过解锁而回到中间位置。
56.再例如,在本发明中,连杆机构与锁定机构相互之间或是连杆机构的各部件之间均是通过铰链方式连接,但本发明不局限于此,铰链连接方式是能自由进行活动连接的一种优选方式,但也可以采用其他能实现将水平运动转换为旋转偏移运动的活动连接的方式。另外,连杆机构具有多个部件的情况下,也可以根据情况,使其中一部分部件之间通过活动连接,而使另一部分部件之间固定连接。
57.再例如,在本发明中,以棘轮机构(左棘轮机构310l和所述右棘轮机构310r)由棘轮套筒、棘轮滑块和棘轮顶块构成为例进行了说明,但本发明不局限于此,只要不影响棘轮机构实现其功能,棘轮机构还可以进一步包括其他部件,即,棘轮机构包括棘轮套筒、棘轮
滑块和棘轮顶块。
58.再例如,在本发明中,以左侧及右侧的棘轮套筒、棘轮滑块和棘轮顶块中的每一个均为一体结构件为例进行了说明,但本发明不局限于此,左侧及右侧的棘轮套筒、棘轮滑块和棘轮顶块中的每一个均可以由多个零部件组合实现各自基本的功能。
59.再例如,在本发明中,以标靶360作为被感测体进行了说明,但本发明不局限于此,只要是具有被感测面且能够被传感器感测到的被感测体,也可以采用其他任意的结构。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。