1.本发明属于船载航空保障装备领域,具体涉及一种航空模拟装置及方法,用于在陆上模拟发射回收装置的回收窗口随船运动的空中姿态变化情况,以化解真机海上对接回收风险。
背景技术:
2.中国专利“一种固定翼无人机短距共轨发射回收装置”,专利授权号:zl201710731451.6公开了一种用于短距发射和回收固定翼无人机的专有技术和装置概念方案,该专利基于气液复合动力和8倍比率的滑轮绳系在一条长约10m级的轨道上实现了固定翼无人机的短距共轨发射和回收功能,该原理已通过模型机回收试验验证了动力系统的合理性,但对于摇摆环境下的动动对接风险尚未完全化解,有必要开发一种较为安全的动动对接方式,不仅验证引导系统的精度是否符合要求,同时也验证在回收“窗口”运动条件下,无人机模拟对接的成功率,并基于此制定无人机的回收及复飞策略,以指导真机回收作业流程的制定。
技术实现要素:
3.本发明要解决的技术问题是:为化解固定翼无人机短距共轨发射回收装置在海上回收无人机时的风险,特别是回收窗口运动状态下,无人机与回收窗口潜在的碰撞风险,测试引导系统精度和无人机飞控精度以及能够适应的海况上限(窗口运动幅度上限),为开展真机海上回收对接试验提供指导,并为制定装置回收无人机的海况等级、回收及复飞策略提供依据,以确保无人机的安全可靠回收。
4.为解决上述技术问题,本发明采用如下技术方案:
5.一种船载无人机回收对接窗口运动模拟装置,其特征在于包括:
6.互相垂直设置的横向平移滑轨和纵向平移滑轨;
7.在横向平移滑轨和纵向平移滑轨上各设置两个同步运动且保持间距的移动滑车,移动滑车上设置高功率激光源用于产生射线,横向的两条射线与纵向的两条射线在发射状态下相交并在交汇处生成一个按规律曲线运动的对接窗口,对接窗口中心点设置为无人机回收对接的目标点;
8.移动滑车驱动执行机构,驱动各滑轨上的移动滑车沿滑轨同步移动,从而使得对接窗口中心点轨迹形成规律曲线;
9.一个信号发送基站,接收对接窗口的中心位置并将该位置实时传输给无人机。
10.进一步地,在横向平移滑轨和纵向平移滑轨相互交叉点设置信号发送基站。
11.进一步地,移动滑车驱动执行机构设置为能够模拟出正弦波的运动轨迹,使得对接窗口的运动与船的运动在幅值和时间周期上相当。
12.进一步地,在横向平移滑轨和纵向平移滑轨上设置易于辨别的刻度线。
13.进一步地,高功率激光源采用带颜色的高压柱状液体发生源替代,或者在高压柱
外层增加薄膜套管使得高压射线为直线。
14.进一步地,船载无人机回收对接窗口运动模拟装置固定安装于水平地面或带有长托板的车辆上,通过悬垂线调整安装,确保模拟装置的纵向平移滑轨、信号发送基站处于与大地坐标系的z向一致。
15.一种船载无人机回收对接窗口运动模拟方法,其特征在于包括如下步骤:
16.s1.无人机回收对接引导准备阶段,将船载无人机回收对接窗口运动模拟固定安装于水平地面或带有长托板的车辆上,通过悬垂线调整安装,确保模拟装置的纵向平移滑轨、信号发送基站处于与大地坐标系的z向一致;
17.s2:放飞无人机,同时开启移动滑车驱动执行机构、高功率激光源、和信号发送基站,移动滑车驱动执行机构带动移动滑车按预设轨迹运动,信号发送基站把对接窗口中心点的实时位置数据发送给无人机,无人机从远处飞来,在信号发送基站位置信息的指引下,通过机载差分gps/bd的解算逐步迭代逼近对接窗口中心点的实时方位,并按此对接窗口中心点轨迹飞行撞向对接窗口中心点,从而模拟无人机短距回收的拦阻过程。
18.进一步地,步骤s1中,在移动滑车驱动执行机构中预设运动轨迹,开启4个高功率激光源,并通过单机恢复检测确认移动滑车驱动执行机构的运动状态能够模拟出正弦波的运动轨迹,使对接的运动与船的运动在幅值和时间周期上均相当。
19.进一步地,步骤s1中,通过预先标定将信号发送基站拟发送信号的零位设定在虚拟对接窗口的中心,并实时解算出中心点下一刻的运动位置,通过单机恢复试验,将其采集信号与对接窗口中心点轨迹保持一致。
20.进一步地,在s2步骤中,通过高速摄像系统记录无人机穿过对接窗口时,与中心点的偏离情况,如果出现较大的偏差,通知无人机操控员人工干预实施复飞;如果无人机按预期穿越虚拟窗口,则记录下实时情况,作为后处理分析偏差大小的依据。
21.相对于现有技术,本发明具有如下有益效果:
22.本发明提出了一种船载无人机回收对接窗口运动模拟装置及方法,可以在陆上模拟回收窗口随船运动变化的轨迹,并将中心点信息反馈给无人机,引导无人机不断逼近理想挂索点,从而实现安全可靠回收,提前化解真机海上对接风险。
23.基于本发明,可在无人机短距共轨发射回收装置实施陆上及海上真机对接试验前,提前摸底无人机飞控和引导系统精度以及可能适应的海况等级,从而为真机对接试验提前化解风险,并为真机对接试验提供指导,也为制定装置回收无人机的海况等级、回收及复飞策略提供依据,以确保无人机的安全、可靠回收。
24.由于本装置结构简单成本低,易于实现且不限制实验场地;同时模拟方法精度高,能够重复进行回收实验操作,可以大幅降低真机海上对接试验的风险,也是实现真机对接前的关键一步。
附图说明
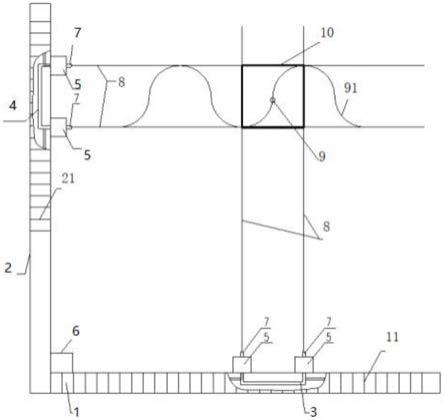
25.图1为本发明的无人机回收对接窗口运动模拟装置示意图(动力系统不在本图反映)。
26.附图标记对应如下:1
‑
横向平移滑轨;2
‑
纵向平移滑轨;3
‑
横向运动伺服执行机构;4
‑
纵向运动伺服执行机构;5
‑
移动滑车;6
‑
信号发送基站;7
‑
高功率激光源;8
‑
激光、9
‑
对接窗口中心点、91
‑
对接窗口中心点轨迹、10
‑
对接窗口。
具体实施方式
27.现结合附图1对根据本发明实施的船载无人机回收对接窗口运动模拟装置及方法进行说明,以验证本发明在无人机复合导引精度方面的作用,本发明并不局限于下述实施例。
28.本发明的船载无人机回收对接窗口运动模拟装置包括横向平移滑轨1、纵向平移滑轨2、四个移动滑车5(两个横向移动滑车5、两个纵向移动滑车5)、横向运动伺服执行机构3、纵向运动伺服执行机构4、四个安装于移动滑车5上的高功率激光源7、信号发送基站6,以及为伺服执行机构提供动力的动力系统。
29.横向平移滑轨1和纵向平移滑轨2垂直安装,安装在移动滑车5上的4个绿色高功率激光源7同时开启,射出4道激光8可在空中形成一个由光束8形成的虚拟对接窗口10,对接窗口10优选为正方形,通过调整移动滑车5的间距,可以调整出不同大小的“窗口”,以适应不同尺度和不同形状的无人机,“窗口”距离横向平移滑轨1、纵向平移滑轨2均留出足够的安全距离,以确保无人机模拟对接时的安全。
30.横向平移滑轨1上的两个移动滑车5同步运动,以保证对接窗口10的2个竖直边同步运动;纵向平移滑轨2上的两个移动滑车5同步运动,以保证对接窗口10的2个横边同步运动通过预设伺服运动;这样可以确保窗口大小保持不变。
31.对接窗口中心点9设定为无人机回收对接的“目标点”,通过对接窗口10的运动,使“目标点”沿着类似正弦波曲线的规律运动(类似船舶的周期摇摆运动,也可以直接输入船在不同海况下的周期摇摆运动轨迹曲线)形成对接窗口中心点轨迹91,运动周期一般是8s~15s,对接窗口10的运动通过横向和纵向运动伺服执行机构带动滑车运动实现;
32.通过安装在横向平移滑轨和纵向平移滑轨交叉点(也即本坐标系下的原点)的信号发送基站6(当然也可以任意相对位置安装,只是算法复杂一点),将“目标点”的位置信息实时传输给无人机,无人机通过差分gps/bd系统解算出相对位置,然后逐步迭代拟合,直至按照预定轨迹“撞”向中心点,从而模拟无人机短距回收的拦阻过程。
33.该船载无人机回收对接窗口运动模拟装置的模拟方法如下:
34.1.无人机回收对接引导准备阶段,将无人机回收对接窗口运动模拟装置固定安装于水平地面或带有长托板的车辆上,通过悬垂线调整安装,确保模拟装置的纵向平移滑轨2、信号发送基站6处于与大地坐标系的z向一致,这是为了使得机载差分gps/bd在差分解算时更加简化。
35.2.在运动伺服执行机构(横向运动伺服执行机构3、纵向运动伺服执行机构4)中预设运动轨迹,开启4个绿色高功率激光源7,并通过单机恢复检测确认横向运动伺服执行机构3、纵向运动伺服执行机构4的运动状态能够模拟出正弦波的运动轨迹,使窗口的运动与船的运动在幅值和时间周期上均相当。
36.3.通过预先标定,将信号发送基站6拟发送信号的零位设定在虚拟对接窗口10的中心(对接窗口中心点9),并实时解算出中心点下一刻的运动位置,通过单机恢复试验,将其采集信号与对接窗口中心点轨迹保持一致。
37.4.准备一套高速摄像系统,用于记录无人机穿过虚拟对接窗口10时,与中心点的
偏离情况,横向平移滑轨和纵向平移滑轨上预先涂上易于辨别的油漆刻度线(纵向刻度21,、横向刻度11),以便于高速摄像后期处理偏差数据时做参考。
38.5.放飞无人机,同时开启横向运动伺服执行机构3、纵向运动伺服执行机构4,绿色高功率激光7,信号发送基站6,通过横向运动伺服执行机构3、纵向运动伺服执行机构4带动移动滑车5按预设轨迹运动,信号发送基站6把虚拟对接窗口中心点9的实时位置数据发送给无人机,无人机从远处飞来,在信号发送基站位置信息的指引下,通过机载差分gps/bd的解算逐步迭代逼近虚拟对接窗口中心点9的实时方位,并按此对接窗口中心点轨迹91飞行虚拟窗口中心点。
39.6.通过高速摄像观察无人机与虚拟对接窗口10的相对位置,如果出现较大的偏差,通知无人机操控员人工干预实施复飞;如果无人机按预期穿越虚拟窗口,则记录下实时情况,作为后处理分析偏差大小的依据。
40.7.通过多次试验采集足够多的样本数据,综合分析判定无人机复合引导精度能否满足使用需求,从而为真机和发射回收装置的回收对接引导提供技术判定依据。
41.综上,本发明实现的关键在于无人机回收对接窗口运动模拟装置、信号发送基站6和无人机在时间轴上统一,对接窗口运动模拟装置横向、纵向滑轨上的移动滑车5能够按照预定轨迹模拟出类似正弦波的运动轨迹,并且信号发送基站6能够实时解算出虚拟窗口中心点9的位置信息并以尽可能小的时间延迟发送给无人机,以引导无人机通过差分解算逐步拟合、逼近虚拟窗口中心点飞行。
42.本发明的绿色高功率激光源7在强光下不可见,因此,只适用于在傍晚或者晚上做试验,如果是白天做试验,可以将绿色高功率激光源换成带颜色的高压柱状喷雾或者在水雾外层增加薄膜套管以实现在高压作用下呈直线。本发明可以安装于移动车辆上,增加垂直于窗口的运动,从而实现在三维坐标系下与实船更加贴近的运动模拟。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。