一种ekf滤波算法与神经网络联合的自主相位控制方法
技术领域
1.本发明涉及航空航天应用技术领域,具体涉及一种基于神经网络的自主相位控制方法。航天器轨道确定与控制,用于实现并优化卫星的轨道控制功能。
背景技术:
2.由于遥感卫星的相位保持是实现地面应用需求的关键技术,随着卫星数量增多,相位控制任务会越来越繁重,增加了地面操作人员和地面站的压力,因此自主相位控制是解决该问题的有效手段。目前在遥感卫星在自主轨道控制方面的研究和应用较少。
3.现有技术1,杜耀珂,杨盛庆,完备,王文妍,陈筠力。近地卫星严格回归轨道保持控制[j].航空学报,2018,39(12):334
‑
344。研究了近地卫星基于严格回归参考轨道的轨道保持控制方法。将卫星编队理论引入单星绝对轨道保持控制,提出了“虚拟卫星编队”的概念,分析了卫星轨道相对于参考空间轨迹在轨道摄动情况下的偏离状态及变化趋势,然后根据卫星编队相对运动学,推导出了偏离状态与虚拟卫星编队构形参数之间的对应关系,并设计了以轨道参数超调、偏置及阈值触发为特征的管道保持控制策略。数值仿真证明了该策略的有效性,但是需要地面干预,会占用大量的测控弧段来完成轨控任务,操作繁琐且效率较低。
[0004]
现有技术2,刘洁,李克行,丁建钊,杨家艾,陈超。一种基于gnss的自主轨控策略研究[a]。中国惯性技术学会。惯性技术与智能导航学术研讨会论文集[c].中国惯性技术学会:中国惯性技术学会,2019:6。提出了一种低轨卫星的自主轨控策略及其实现方案。该方法依据gnss实时定轨数据确定实时轨道根数,采用平滑滤波对准平根数进行拟合,并以此为依据开展轨控策略研究。自主轨道控制以维持轨道半长轴和偏心率为主要目标,基于压力传感器实现推力的实时自主标定和卫星质量的自主计算,并将轨控策略与整星任务相结合进行自主的轨道控制。但是忽略了轨道控制时对卫星姿态的干扰影响。
[0005]
现有技术3,谢挺,刘刚,高旭东.带有控制增益自校正的甚低轨道卫星自主轨道维持方法[j].上海,2018,35(05):67
‑
74。设计了一种带有轨控增益校正的自主轨道维持方法。该方法可通过前一次轨控的结果对轨控增益进行校正,提高轨控算法对卫星质量、推力大小等不确定因素的鲁棒性,逐渐提高轨道控制的精度。该方法很好地实现了甚低轨道高度维持控制,但是忽略了轨道控制时对卫星姿态的干扰影响。
[0006]
现有技术4,莫凡,丁建钊,任放,张新伟,赵晨光,王家炜,赵文彦.一种低轨遥感卫星自主轨道控制方法[j].航天器工程,2020,29(03):12
‑
17提出一种无需地面站支持的自主轨道控制方法。利用在轨实时计算得到的轨道偏差作为触发条件,在偏差超出阈值时,卫星根据轨道外推结果、剩余燃料质量、发动机推力等参数自主计算轨控时间,并在不与载荷任务冲突的前提下,实施发动机点火,实现卫星轨道误差的在轨自主补偿。但是忽略了轨道控制时对卫星姿态造成的干扰。
技术实现要素:
[0007]
本发明为解决现有技术中,存在轨道控制过程中忽略了卫星姿态造成的干扰问题,提供一种ekf滤波算法与神经网络联合的自主相位控制方法。
[0008]
一种ekf滤波算法与神经网络联合的自主相位控制方法,采用航天器化学推进系统作为推力器进行设计与实现;该方法由以下步骤实现:
[0009]
步骤一、采用扩展卡尔曼滤波算法,实时确定卫星轨道;
[0010]
步骤二、自主轨道控制;具体过程为:
[0011]
步骤二一、相位预测:
[0012]
设定通过卫星间获取轨道数据,且轨道控制过程中gps导航接收机数据正常可用;则两颗卫星的初始相位差为δ1,期望的相位差为δ2,期望的相位差偏差为δδ;
[0013]
步骤二二、将初始相位差调整到δ2±
δδ,则需要调整两颗卫星的高度差控制相位漂移速度,则两颗卫星的轨道周期差值为:
[0014][0015]
式中,δt为两颗卫星的周期差,a1为第一卫星的轨道半长轴,a2为第二卫星的轨道半长轴;μ为引力常数;
[0016]
两颗卫星的相位随时间的变化规律为:
[0017][0018]
其中,为相位变化量,t相位漂移时长;
[0019]
步骤二三、自主判断策略:
[0020]
当两颗卫星的相位超过阈值时,所述第一卫星在后,第二卫星在前,当a1>a2且则降低第一卫星的轨道高度,当a1<a2且时,则提高第一卫星的轨道高度;
[0021]
根据步骤二三的自主判断策略,轨道控制量为:
[0022]
δa=λ|a1‑
a2|
[0023]
式中,λ为增益系数;
[0024]
由轨道摄动引起的半长轴变化为:
[0025][0026]
式中,δv
s
为轨道控制推力器提供的径向速度增量,δv
t
为轨道控制推力器提供的横向速度增量,δv
t
为姿态控制推力器提供的横向速度增量,n为轨道角速度,e为偏心率,f为真近点角;
[0027]
则化学推进系统的控制器为:
[0028]
δa=δa1 δa2[0029]
式中,δa2=k
a
δa1,k
a
为姿态控制推力器的比例系数,该比例系数在卫星进入轨道后需要进行校准;
[0030]
步骤二四、将脉冲控制模型应用于化学推进系统,分配控制时间计算速度增量,由推力器提供的横向速度增量为:
[0031][0032]
式中,f为推力器提供的推力,m0为卫星初始质量,t1为轨道控制推力器工作时间,为姿态控制推力器作用于横向的总工作时间,t
2j
为4个姿态控制推力器作用于横向的工作时间;
[0033]
步骤三、轨道控制过程中的姿态控制;
[0034]
定义q
d
为期望的姿态角,w
d
为期望的角速度,则偏差四元数e1和偏差角速度e2表示为:
[0035][0036]
定义滑模面s为:
[0037]
s=e2 k1e1=w
‑
w
r
[0038]
式中,w
r
=w
d
‑
k1e1,当s
→
0时,偏差四元数e1和偏差角速度e2沿滑模面趋向于零;
[0039]
在轨道控制过程中,动力学模型中的不确定扰动部分采用神经网络逼近;定义为:
[0040][0041]
则设计的控制器表示为:
[0042][0043]
式中,饱和函数sat(s)表示为:
[0044][0045]
自适应更新率为:
[0046][0047]
式中,γ=diag{γ
ii
},i=1,2
···
7,当t
→
∞时,s
→
0,因此,q
→
q
d
和w
→
w
d
;则认为跟踪误差是有界的。
[0048]
本发明的有益效果:本发明的控制方法,采用扩展卡尔曼滤波算法来确定卫星轨道,通过确定后的轨道来计算卫星相位的漂移,当卫星相位漂出设定的相位阈值时,开始调整卫星姿态并进行轨道控制,星上提前自主生成轨道控制量和控制方向。为保证轨道控制过程中的姿态稳定,提出了一种基于四个斜装推力器的姿态控制方法,并采用神经网络来逼近干扰力矩。数学仿真结果证明了所提出的自主相位控制方法是有效可行的。
[0049]
本发明选用化学推进系统作为推力机构进行设计与实现。化学推进系统是遥感卫星中常用的一种推进系统,可靠性较高,化学推进系统的推力相对较大,并且存在安装偏差、推力矢量偏差和质心偏差,会导致卫星姿态不稳定,影响轨道控制效率和精度,很难实
现高精度的相位控制,因此很难实现自主控制,通过本发明的设计算法和方案可以实现高精度的自主相位控制。
附图说明
[0050]
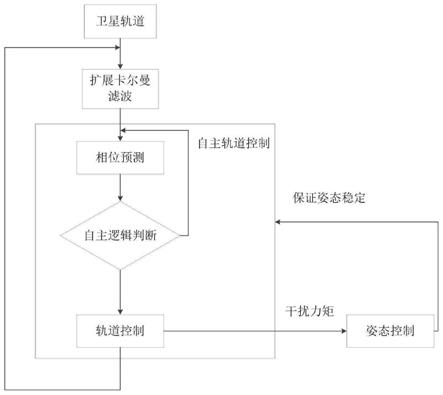
图1为本发明所述的一种ekf滤波算法与神经网络联合的自主相位控制方法的流程图;
[0051]
图2为本发明所述的一种ekf滤波算法与神经网络联合的自主相位控制方法的控制原理框图;
[0052]
图3为本发明所述的一种ekf滤波算法与神经网络联合的自主相位控制方法中ekf算法滤波后的位置误差示意图;
[0053]
图4为ekf算法滤波后的速度误差示意图;
[0054]
图5为卫星相位变化效果图;
[0055]
图6为卫星半长轴变化效果图;
[0056]
图7为rbf神经网络控制下的四元数偏差示意图;
[0057]
图8为rbf神经网络控制力矩示意图。
具体实施方式
[0058]
结合图1至图8说明本实施方式,一种ekf滤波算法与神经网络联合的自主相位控制方法,选用化学推进系统作为推力器进行设计与实现。具体的自主相位控制流程如图1所示。
[0059]
一、滤波算法设计;
[0060]
考虑中心引力项、高阶引力项j2,j3和j4,地球的引力势函数表示为
[0061][0062]
其中r
e
为地球半径,μ为引力常数,为地心纬度r=r是轨道位置的模。
[0063]
定义卫星速度矢量v=[v
x v
y v
z
]
t
,轨道的状态变量为x=[x y z v
x v
y v
z
]
t
,则得到卫星轨道的状态方程和观测方程为
[0064][0065]
其中,w(t)为系统的随机噪声,v(t)为测量噪声,h(x,t)和f(x,t)为向量函数,可表示为
[0066][0067][0068]
其中,
[0069]
对式(2)进行线性离化,可得
[0070][0071]
其中,w
k
和v
k
是均值为零的独立高斯白噪声,其中,q
k
和r
k
为噪声协方差矩阵,和为不同时刻的高斯白噪声,δ
kj
为均值差,状态矩阵a和观测矩阵h
k
为:
[0072][0073][0074]
则ekf公式可表示为:
[0075][0076]
其中,φ
k,k
‑1=i6×6 at a2t2/2为状态转移矩阵,i6×6为单位矩阵,t为采样周期,p
k/k
‑1为k时刻先验估计协方差,k
k
为状态增益矩阵,p
k
和p
k
‑1为k时刻和k
‑
1时刻状态后验估计误差协方差矩阵,为k时刻的误差估计,和为k时刻和k
‑
1时刻后验状态估计值,为k时刻先验状态估计值,z
k
为测量值。。根据上式可实时确定卫星轨道。
[0077]
二、自主相位控制设计;对商业地球观测星座来说,相位分布的维持对卫星的重访和覆盖特别重要。如果同一轨道平面上的两颗卫星高度差较大,相位很快会超出阈值。因此,两颗卫星应尽可能保持在同一轨道高度。
[0078]
若卫星间可以获取轨道数据,并且轨控期间gps导航接收机数据正常可用。两颗卫星的初始相位差为δ1,期望的相位差为δ2,期望的相位差偏差为δδ,两颗星的轨道半长轴为a1和a2,要将初始相位差调整到δ2±
δδ,则需要调整两颗星的高度差来控制相位漂移速度,两颗星的轨道周期差值为
[0079][0080]
其中,δt为两颗卫星的周期差,两颗卫星的相位随时间的变化规律为
[0081][0082]
其中,为相位变化量,t相位漂移时长。
[0083]
当两颗卫星的相位超过限值时,卫星1在后,卫星2在前,当a1>a2且则降低卫星1的轨道高度,当a1<a2且时,则提高卫星1的轨道高度。
[0084]
根据上述自主判断策略,轨道控制量为
[0085]
δa=λ|a1‑
a2|
ꢀꢀ
(11)
[0086]
式中λ为增益系数。
[0087]
由轨道摄动引起的半长轴变化为
[0088][0089]
其中,δv
s
为轨控推力器提供的径向速度增量,δv
t
是轨控推力器提供的横向速度增量,δv
t
是姿控推力器提供的横向速度增量,n是轨道角速度,e(e≈0)是偏心率,f是真近点角。
[0090]
则化学推进系统的控制器为
[0091]
δa=δa1 δa2ꢀꢀ
(13)
[0092]
式中δa2=k
a
δa1,k
a
为姿态控制推力器的比例系数,该比例系数在卫星进入轨道后需要进行校准。
[0093]
将脉冲控制模型应用于化学推进系统,分配控制时间计算速度增量,由推力器提供的横向速度增量为
[0094][0095]
式中,f为推力器提供的推力,m0为卫星初始质量,t1为轨道控制推力器工作时间,为姿态控制推力器作用于横向的总工作时间,t
2j
为4个姿态控制推力器作用于横向的工作时间。
[0096]
三、轨控过程中姿态控制算法设计;
[0097]
在轨道控制过程中,由于推进系统推力方向偏差、推进器安装偏差、质心偏差等因素,轨控推力会对卫星产生姿态耦合力矩,导致卫星姿态不稳定。具体的控制原理如图2所示。
[0098]
定义q
d
为期望的姿态角,w
d
是期望的角速度,则偏差四元数e1和偏差角速度e2表示为
[0099][0100]
定义滑模面
[0101]
s=e2 k1e1=w
‑
w
r
ꢀꢀ
(16)
[0102]
其中,w
r
=w
d
‑
k1e1,当s
→
0时,偏差四元数和偏差角速度沿滑模面趋向于零。
[0103]
在轨道控制过程中,动力学模型中的不确定扰动部分采用神经网络逼近。
[0104]
定义
[0105][0106]
则设计的控制器表示为
[0107][0108]
其中,饱和函数sat(s)表示为
[0109][0110]
自适应更新率为
[0111][0112]
其中,γ=diag{γ
ii
},(i=1,2
···
7),当t
→
∞时,s
→
0,因此,q
→
q
d
和w
→
w
d
。意味着跟踪误差是有界的。
[0113]
具体实施方式二、本实施方式为具体实施方式一所述的一种ekf滤波算法与神经网络联合的自主相位控制方法的实施例,以一颗带有化学推进系统的卫星为例,该推进系统含有5个推力器,进行仿真验证所提控制方法的有效性。最大控制力矩为0.5nm,推进系统的偏差值和初始轨道如表1和表2所示。
[0114]
表1推进系统偏差
[0115]
参数参数值几何安装偏差θ
a
=[0.5;0;0;0;0.5]
°
几何安装偏差方位角θ
ac
=[90;90;90;90;90]
°
推力偏差θ
b
=[1;1;1;1;1]
°
推力偏差方位角θ
bc
=[90;90;90;90;90]
°
质心偏移i
mc
=[0.01;0.01;0.01]mm
[0116]
表2初始轨道参数
[0117][0118][0119]
卫星系统初始参数如表3所示。神经网络控制算法被设计用来提高推进系统的姿态控制精度,rbf神经网络参数如表4所示。
[0120]
表3卫星初始参数
[0121]
参数参数值推力f=1.3n比例系数k
a
=1.3卫星质量m0=200kg真空比冲i
s
=2000n
·
s/kg转动惯量i=diag(55 50 30)初始姿态q0=[0.2;0.3;0.4]初始姿态角速度w0=[
‑
0.2;0.1;0.3](
°
/s)期望姿态q
d
=[0;0.8509;0]期望姿态角速度w0=[0;0;0](
°
/s)
[0122]
表4ekf和rbf神经网络控制器
[0123]
参数参数值p
k0
diag(200 300 400 0.3 0.5 0.3)q
k
diag(15 15 15 8 8 8)
×
0.0001
r
k
diag(600 600 600 0.06 0.06 0.06)
×
10t0.125sk1diag(0.63 0.63 0.63)k
d
diag(88.7 78.8 78.8)
×
0.23k
s
diag(0.006 0.006 0.006)γdiag(4 4 4 4 4 4 4)
×
100
[0124]
卫星轨道受到的噪声可认为是随机噪声,该噪声会产生较大的轨道瞬时波动,因此,需要设计轨道滤波算法,卫星轨道位置和速度的随机噪声分别设置在[
‑
3030]m和[
‑
0.050.05]m/s范围内。采用所设计的ekf算法对卫星进行轨道滤波,ekf效果如图3和图4所示。
[0125]
由于gps在卫星上的位置数据误差约为30m,不利于自主轨道控制策略的制定,因此采用ekf算法对gps数据进行滤波。从图3和图4可知,位置噪声从峰值30m降到0.6m以内,速度噪声从峰值0.05m/s降到0.016m/s以内。可以看出,所设计的ekf算法可以显著提高定轨精度,并成功地为自主控制策略的制定奠定了基础。
[0126]
图5和图6分别给出了卫星的相位变化和平均轨道半长轴变化,确定轨道后,开始制定轨道控制策略。相位要求范围为[117.5
°‑
122.5
°
],当卫星相位超过该阈值时,卫星推进系统自动开始工作,轨道确定和相位跟踪是实现自主相位保持的必要技术手段。
[0127]
从图5和图6可知,卫星平均轨道半长轴为6903.7
±
0.2km,应用ekf算法得到的轨道半长轴为6903.7
±
0.02km,另一颗卫星轨道半长轴为6902.7
±
0.02km,由于两颗卫星有轨道高度差的存在,因此两颗卫星之间的相位会以一定的速度进行漂移,在705s时相位超过117.5
°
,卫星开始自主制定控制策略,控制时间和持续时间分别是705s和62s,卫星的控制量是1.04km。控制后半长轴控制偏差在10m以内,相位开始回漂,轨道控制精度相对较高,这主要与姿态控制推力器的比例系数有关,该系数标定不准确将影响轨道控制精度,图7和图8给出了四元数偏差曲线和控制力矩曲线。
[0128]
从图7和图8可知,在轨道控制过程中,神经网络控制下的四元数偏差在
‑2×
10
‑3和2
×
10
‑3内,神经网络控制下的控制力矩稳定在
±
0.15nm内,充分地说明了神经网络控制算法的优越性,并且证明了卫星从相位跟踪到自主轨道确定,再到轨道控制策略整个过程的有效性和可行性,实现了自主相位控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。