1.本发明涉及一种无人机机场,特别是一种无人机智能化机场地面系统。
背景技术:
2.无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机与行业应用相结合,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用。无人机均配备有无人机机场,供无人机停放及升降。
3.对于长距离的无人机而言,对跑道要求高,需要就较长的跑道,这就需要无人机机场容量大,而很多的无人机机场,容量小,无法提供足够的无人机降落所需长度的跑道,即使设置了跑道阻拦装置,也无法满足长距离无人机的降落要求;而且阻拦装置中阻拦索的高度固定,一些无人机由于机型不同,其阻拦钩的安装位置不同,无法准确与阻拦索勾连,而且容易因较大的冲击力破坏阻拦装置,导致阻拦装置的使用寿命短。
4.机场上的灯光系统一般为固定式灯光,固定式的灯光照明范围有限,在光线较暗的情况下,无法准确、针对性地对无人机的情况进行检修和维护。
5.因此,现有的无人机机场系统,存在容量小、阻拦装置的使用寿命短、灯光系统不便于对无人机系统的维护和检查。
技术实现要素:
6.本发明的目的在于,提供一种无人机智能化机场地面系统。本发明具有机场容量大、阻拦装置使用寿命长、灯光系统便于对无人机系统的维护和检查的特点。
7.本发明的技术方案:无人机智能化机场地面系统,包括停机坪、飞行跑道和灯光系统,所述飞行跑道上设有阻拦装置,所述阻拦装置包括位于跑道两侧的阻拦座和位于两个阻拦座之间的阻拦索,阻拦座内设有上索轮和下索轮,上索轮和下索轮之间设有防护组件,阻拦座的顶部设有经升降装置连接而上下移动的导向轮,阻拦索的一端与阻拦座固定,阻拦索的自由端分别绕过下索轮、防护组件、上索轮和导向轮向外延伸;所述灯光系统包括移动式应急照明装置,所述移动式应急照明装置包括移动底座,移动底座上设有固定座,固定座上铰接有转动臂,转动臂上转动连接有升降灯杆,升降灯杆的端部转动连接有灯盘,灯盘上设有固定灯和移动灯。
8.前述的无人机智能化机场地面系统中,所述固定座内设有卷绕腔和导向腔,上索轮和下索轮均通过驱动轴转动连接在卷绕腔内,驱动轴的一端设有阻尼器,驱动轴的另一端设有驱动上索轮和下索轮转动的卷绕电机以及离合器,导向轮位于导向腔内。
9.前述的无人机智能化机场地面系统中,所述防护组件包括位于上索轮和下索轮之间的横向滑轨,横向滑轨上滑动连接有防护轮,防护轮通过安装架连接有保护推杆,保护推
杆的外部套设有阻尼套,保护推杆伸入到阻尼套内通过拉簧与阻尼套连接。
10.前述的无人机智能化机场地面系统中,所述升降装置包括与阻拦座滑动连接的齿条,导向轮安装在齿条的顶部,齿条上啮合有经驱动电机驱动的齿轮,齿轮的一侧设有与电动推杆连接的固定架,固定架上设有与齿轮配合啮合的固定板。
11.前述的无人机智能化机场地面系统中,所述阻拦索由四根钢索构成,阻拦索包括中间的主体段和两端的连接段,主体段的外部设有树脂包覆层,连接段上活动连接有套筒,套筒的两侧均通过止滑环固定,套筒与阻拦座螺纹连接,连接段的端部穿过套筒并分别连接有四个加强杆,四个加强杆的端部设有与阻拦座呈十字状连接的自攻螺钉。
12.前述的无人机智能化机场地面系统中,所述主体段上设有活动套,活动套与树脂包覆层间隙连接,活动套的底部设有两个呈“八”字形的支撑杆,支撑杆的端部转动连接有重力滚珠。
13.前述的无人机智能化机场地面系统中,所述移动灯包括灯体,灯体的两端设有灯盖,两个灯盖的一侧均设有固定柱,两个固定柱之间设有连接杆;灯盘上设有安装座,安装座上铰接有伸缩杆,伸缩杆的端部设有与连接杆扣接的扣套,扣套的一侧设有缺口。
14.前述的无人机智能化机场地面系统中,所述固定柱的端部沿着圆周方向设有若干磁性吸盘,磁性吸盘的一端与固定柱铰接,从而实现向固定柱内收拢或者向固定柱外展开,固定柱的端面设有供收拢的磁性吸盘嵌入的凹槽。
15.前述的无人机智能化机场地面系统中,所述移动底座的底部一侧设有支脚,移动底座的底部另一侧设有移动轮,支脚的底部低于移动轮的底部,移动底座的上方设有推拉杆以及支撑升降灯杆卧倒的支撑架。
16.与现有技术相比,本发明优化跑道设计,提高机场容量,并设置了可调节高度的阻拦装置,能有效的缩减跑道距离,满足短距和长距的无人机起降,且阻拦装置采用多重阻尼缓冲设置,减少冲击力对阻拦装置的破坏,延长使用寿命,不使用时也不会干扰到行人,使用更安全、方便;且阻拦索强度高,承载力强,在使用时利用支撑杆和重力滚珠的配合,保证了阻拦索稳定、平衡的阻拦状态;
17.设置了移动式应急照明装置,可将照明装置随意移动到所需位置,使用灵活,使用时可以升降翻转调整,扩大照明范围,还设置了可拆卸的移动灯,可手提或固定在无人机上照明,更具有针对性,便于对无人机系统的维护和检查;不使用时,就折叠收拢,便于移动。
18.因此,本发明具有机场容量大、阻拦装置使用寿命长、便于对无人机系统的维护和检查的特点。
附图说明
19.图1是本发明的结构示意图;
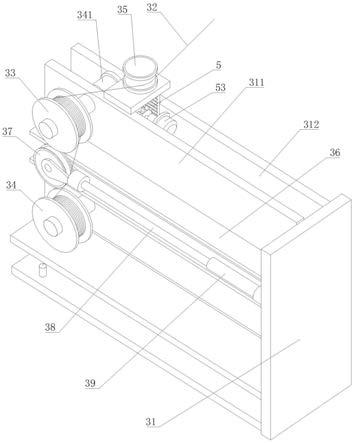
20.图2是阻拦装置的结构示意图;
21.图3是阻拦索在固定座内的连接结构示意图;
22.图4是升降装置的结构示意图;
23.图5是阻拦索的结构示意图;
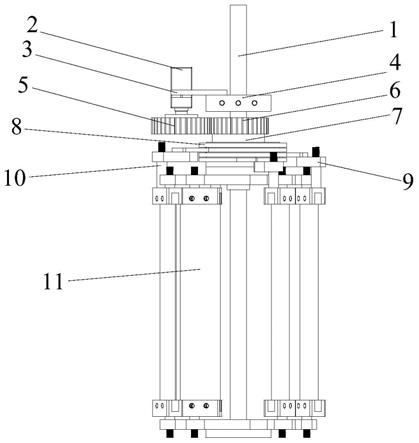
24.图6是移动式应急照明装置的结构示意图;
25.图7是灯盘的结构示意图;
26.图8是移动灯的结构示意图。
27.附图标记:1、停机坪;2、飞行跑道;3、阻拦装置;31、阻拦座;311、卷绕腔;312、导向腔;32、阻拦索;321、树脂包覆层;322、套筒;323、止滑环;324、加强杆;325、自攻螺钉;326、活动套;327、支撑杆;328、重力滚珠;33、上索轮;34、下索轮;341、阻尼器;35、导向轮;36、横向滑轨;37、防护轮;38、保护推杆;39、阻尼套;4、移动式应急照明装置;41、移动底座;411、支脚;412、移动轮;413、推拉杆;414、支撑架;42、固定座;43、转动臂;44、升降灯杆;45、灯盘;46、固定灯;47、移动灯;5、升降装置;51、齿条;52、齿轮;53、驱动电机;54、固定架;541、固定板;55、电动推杆;61、灯体;62、灯盖;63、固定柱;631、磁性吸盘;632、凹槽;64、连接杆;65、安装座;66、伸缩杆;67、扣套。
28.下面结合附图和具体实施方式对本发明作进一步的说明。
具体实施方式
29.本发明的实施例:如图1
‑
3所示,无人机智能化机场地面系统,包括停机坪1、飞行跑道2和灯光系统,所述飞行跑道2包括与停机坪1连通的主跑道区,主跑道区为交叉跑道,增加跑道容量,主跑道区的长度可以为600~800m,主跑道区处还可以根据需求配以次跑道区,次跑道区的长度可以为600m,以满足非短距起降状态无人机的功能要求。
30.交叉跑道上设有阻拦装置3,所述阻拦装置3包括位于跑道两侧的阻拦座31和位于两个阻拦座31之间的阻拦索32,所述阻拦座31内设有卷绕腔311和导向腔312,卷绕腔311内均通过驱动轴转动连接有上索轮33和下索轮34,驱动轴的一端设有阻尼器341,驱动轴的另一端设有驱动上索轮33和下索轮34转动的卷绕电机以及离合器(图中未示意)。上索轮33和下索轮34之间设有防护组件,所述防护组件包括位于上索轮33和下索轮34之间的横向滑轨36,横向滑轨36上滑动连接有防护轮37,防护轮37通过安装架连接有保护推杆38,保护推杆38的外部套设有阻尼套39,阻尼套39与阻拦座31固定连接,保护推杆38伸入到阻尼套39内通过拉簧与阻尼套39连接;导向腔312内设有经升降装置5连接而上下移动的导向轮35;阻拦索32的一端与阻拦座31固定,阻拦索32的自由端分别绕过下索轮34、防护轮37、上索轮33和导向轮35向外延伸至另一侧的阻拦座31。
31.设置的阻拦装置3能有效的缩减跑道距离,将跑道安全距离降至400m,实现紧急条件下飞机的紧急制动。将阻拦索32卷绕在上索轮33和下索轮34上,通过卷绕电机的卷绕可自动调整阻拦索32的长度,并通过可上下移动的导向轮35对阻拦索32进行导向,从而可以调整阻拦索32的高度,不使用时,可适当放长阻拦索32长度,并降低阻拦索32的高度,避免干扰到行人。当无人机降落时,根据无人机的机型、阻拦钩的位置调整阻拦索32的高度,使得无人机的阻拦钩能够顺利钩连到阻拦索32,并在阻尼器341的作用下缓慢释放阻拦索32,实现阻拦索32的对无人机的阻尼阻拦;当上索轮33和下索轮34上卷绕的阻拦索32快用完时,阻拦索32拉动防护轮37,使得防护轮37在阻尼套39和拉簧的阻尼作用下沿着横向滑轨36缓慢移动缓解冲击力,更好地保护阻拦装置3。
32.如图4所示,所述升降装置5包括与阻拦座31滑动连接的齿条51,导向轮35安装在齿条51的顶部,齿条51上啮合有经驱动电机53驱动的齿轮52,齿轮52的一侧设有与电动推杆55连接的固定架54,固定架54上设有与齿轮52配合啮合的固定板541。通过驱动电机53带动齿轮52转动,从而带动与其啮合的齿条51和导向轮35上下移动,当调整好合适的位置后,
利用电动推杆55推动固定板541与齿轮52啮合,从而固定齿条51,保持阻拦索32的高度位置。
33.如图5所示,所述阻拦索32由四根钢索构成,阻拦索32包括中间的主体段和两端的连接段,主体段的外部设有树脂包覆层321,连接段上活动连接有套筒322,套筒322的两侧通过止滑环323固定,套筒322与阻拦座31螺纹连接,连接段的端部穿过套筒322并分别连接有四个加强杆324,四个加强杆324的端部设有与阻拦座31呈十字状连接的自攻螺钉325。
34.设置的树脂包覆层321包覆在由四根钢索构成的阻拦索32的主体段,提高阻拦索32的强度和紧固性能,阻拦索32利用套筒322和自攻螺钉325与阻拦座31进行双重固定,大大提高阻拦索32的固定性能,设置的止滑环323使得套筒322与钢索紧密结合,不易滑移,提高固定稳定性;并利用树脂包覆层321、止滑环323、套筒322和加强杆324对阻拦索32进行保护、加强,提高阻拦索32的强度,提高阻拦座31承载阻拦索32的强度,延长使用寿命。
35.所述主体段上设有活动套326,活动套326与树脂包覆层321间隙连接,活动套326的底部设有两个呈“八”字形的支撑杆327,支撑杆327的端部转动连接有重力滚珠328。在重力滚珠328的重力作用下,支撑杆327始终保持向下的状态,且重力滚珠328与跑道地面滚动接触,从而对主体段起到支撑、平衡的作用,使得阻拦索32在导向轮35的导向作用,距离地面一定高度的状态下,保持阻拦索32平稳的稳定阻拦状态,并且由于活动套326滑动连接,受力时会向两侧滑动,不会影响无人机的阻拦钩勾连阻拦索32。
36.如图6所示,所述灯光系统包括移动式应急照明装置4,便于对无人机系统的维护和检查。所述移动式应急照明装置4包括移动底座41,所述移动底座41的底部一侧设有支脚411,移动底座41的底部另一侧设有移动轮412,支脚411的底部低于移动轮412的底部,移动底座41的上方设有推拉杆413以及支撑升降灯杆44卧倒的支撑架414。推拉杆413的设计便于人工手动移动或者与车辆连接,利用车辆带动照明装置移动,方便将照明装置移动到所需位置,使用灵活机动。
37.移动底座41上设有固定座42,固定座42上铰接有转动臂43,转动臂43上转动连接有升降灯杆44,升降灯杆44的端部转动连接有灯盘45,灯盘45上设有固定灯46和移动灯47。照明装置使用时将升降灯杆44立起,并将升降灯杆44进行高度调整,从而调整照明范围,升降灯杆44可以为常规的多节式管道结构,并通过螺栓固定,或者是电动气缸伸缩杆66结构;不使用时,收缩升降灯杆44,并将升降灯杆44弯折呈水平状态,并用支撑架414固定,方便移动。
38.如图7所示,所述移动灯47包括灯体61,灯体61的两端设有灯盖62,两个灯盖62的一侧均设有固定柱63,两个固定柱63之间设有连接杆64;灯盘45上设有安装座65,安装座65上铰接有伸缩杆66,伸缩杆66的端部设有与连接杆64扣接的扣套67,扣套67的一侧设有缺口。
39.如图8所示,所述固定柱63的端部沿着圆周方向设有若干磁性吸盘631,磁性吸盘631的一端与固定柱63铰接,从而实现向固定柱63内收拢或者向固定柱63外展开,固定柱63的端面设有供收拢的磁性吸盘631嵌入的凹槽632。
40.在灯盘45上设置的移动灯47通过扣套67可拆卸安装在安装座65上,并通过伸缩杆66和连接杆64调整移动灯47的照明位置,使用灵活,还可以将移动灯47从安装座65上取下,通过将磁性吸盘631旋转展开,吸附固定在无人机上,提高固定稳定性,便于对无人机进行
维护和检修,不使用时就将磁性吸盘631旋转收拢到凹槽632内,减少占用空间。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。