1.本发明涉及机械手技术领域。
背景技术:
2.机械手在工业生产中应用非常广泛,其由手掌和多个手指组成,在工作中由手指进行物体的抓取。然而目前的机械手手指只能整体动作,不能每个关节动作,另外,目前的机械手手指只能实现抓取,并不能像人手一样实现摆动,从而使得旋转的机械手在使用过程中灵活度较低,应用范围受到限制。
技术实现要素:
3.为解决上述技术问题,本发明提供一种机械手,能像人手一样实现每个关节的动作,且可实现摆动,提高其灵活度,增加其应用范围。
4.本发明解决其技术问题所采用的技术方案是:
5.一种机械手,包括手掌和手指,所述手掌上设有多个手指摆动机构,所述手指与所述手指摆动机构一一对应地连接所述手指摆动机构;
6.所述手指包括第一驱动机构和依次转动连接的第一关节、第二关节、第三关节,所述第三关节转动连接所述手指摆动机构,所述第一驱动机构用于驱动所述第一关节、所述第二关节及所述第三关节转动,所述第二关节与所述第三关节之间、所述第三关节与所述手指摆动机构之间设有弹性件。
7.优选地,所述第一驱动机构包括用于驱动所述第一关节的第一驱动组件、驱动所述第二关节的第二驱动组件及用于驱动所述第三关节的第三驱动组件。
8.优选地,所述第一驱动组件包括连接所述第一关节及所述第二关节的第一转轴、套接在所述第一转轴上的第一滚动轴承、设置在所述第一关节内部的第一安装座、设置在所述第二关节上的第一导向块、第一牵引钢丝和第五牵引钢丝,所述第一牵引钢丝及所述第五牵引钢丝均穿过所述第一导向块连接所述第一安装座,且所述第一牵引钢丝抵接在所述第一滚动轴承的上侧,所述第五牵引钢丝抵接在所述第一滚动轴承的下侧。
9.优选地,所述第二驱动组件包括连接所述第二关节及所述第三关节的第二转轴、套接在所述第二转轴上的第二滚动轴承、设置在所述第二关节内部的第二安装座、设置在所述第三关节上的第二导向块、第二牵引钢丝和第六牵引钢丝,所述第二牵引钢丝及所述第六牵引钢丝均穿过所述第二导向块连接所述第二安装座,且所述第二牵引钢丝抵接在所述第二滚动轴承的上侧,所述第六牵引钢丝抵接在所述第二滚动轴承的下侧。
10.优选地,所述第三驱动组件包括固设在所述手指摆动机构上的转动耳板、连接所述转动耳板及所述第三关节的第三转轴、套接在所述第三转轴上的第三滚动轴承、设置在所述第三关节内部的第三安装座、设置在所述转动耳板两端的第三导向块和第四导向块、第三牵引钢丝、第四牵引钢丝,所述第三牵引钢丝穿过所述第三导向块连接所述第三安装座,所述第四牵引钢丝穿过所述第四导向块连接所述第三安装座,并绕接在所述第三滚动
轴承上。
11.优选地,所述手指摆动机构包括第二驱动机构、手指摆动板及舵盘,所述手指摆动板的一端与所述手掌铰接,所述手指摆动板的另一端用于所述手指,所述第二驱动机构通过所述舵盘驱动所述手指摆动板摆动,实现所述手指的摆动。
12.优选地,所述手指摆动板的中部沿其长度方向设有摆臂孔,所述舵盘上设有驱动柱,所述驱动柱滑接于所述摆臂孔内;
13.所述摆臂孔为腰型孔,其长度为a,宽度为b,a:b=3.5:1
‑
4.5:1。
14.优选地,所述舵盘包括舵盘主体,所述舵盘主体的上表面用于连接所述第二驱动机构,所述驱动柱设置在所述舵盘主体的下表面;
15.所述舵盘主体的上表面设有卡接块,所述卡接块内设有多边形卡接槽,所述第二驱动机构的输出轴插接在所述卡接槽内。
16.优选地,所述手掌上设有安装架,所述第一驱动机构及所述第二驱动机构均设置在所述安装架上。
17.优选地,所述手指包括拇指、食指、中指、无名指和小指,食指、中指、无名指和小指均通过所述手指摆动机构连接所述手掌;
18.所述拇指的所述第三关节上设有固定板,所述手掌上对应所述拇指设有第一摆轴,所述第一摆轴的另一端连接所述固定板,所述第一摆轴上套接有第一转盘,所述第一转盘连接第三驱动机构;
19.所述固定板通过支撑杆连接第二摆轴,所述第二摆轴的另一端连接所述拇指的第三关节,所述第二摆轴上套接有第二转盘,所述第二转盘连接第四驱动机构。
20.本发明实施例的一种机械手,与现有技术相比,其有益效果在于:通过将第一关节、第二关节、第三关节依次转动连接,并将第三关节转动连接手指摆动机构,同时通过第一驱动机构驱动第一关节、第二关节及第三关节转动,使得手指能像人手一样实现每个关节的动作;同时,通过设置手指摆动机构,并与手指一一对应地连接,从而可实现手指的摆动,提高了机械手的使用灵活度,增加了其应用范围。本发明结构简单,使用效果好,易于推广使用。
附图说明
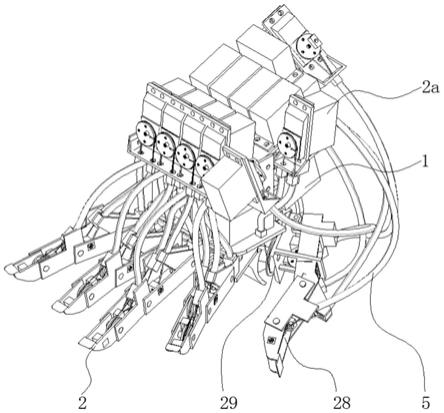
21.图1为本发明的机械手的轴测图。
22.图2为本发明的机械手的另一视角的轴测图。
23.图3为本发明的机械手的手指的轴测图。
24.图4为本发明的机械手的手指另一视角的轴测图。
25.图5为本发明的机械手的手指的分解示意图。
26.图6为发明的机械手的手指摆动机构的结构示意图。
27.图7为发明的手指摆动板的结构示意图。
28.图8为发明的舵盘的结构示意图。
29.其中:1
‑
手掌,2
‑
手指,21
‑
第一关节,211
‑
夹持板,22
‑
第二关节,23
‑
第三关节,25
‑
第一驱动组件,251
‑
第一转轴,252
‑
第一滚动轴承,253
‑
第一安装座,254
‑
第一导向块,255
‑
第一牵引钢丝,26
‑
第二驱动组件,261
‑
第二转轴,262
‑
第二滚动轴承,263
‑
第二安装座,
264
‑
第二导向块,265
‑
第二牵引钢丝,266
‑
第一扭簧,27
‑
第三驱动组件,271
‑
转动耳板,272
‑
第三转轴,273
‑
第三滚动轴承,274
‑
第三安装座,275
‑
第三导向块,276
‑
第四导向块,277
‑
第三牵引钢丝,278
‑
第四牵引钢丝,279
‑
第二扭簧,28
‑
拇指,29
‑
固定板,2a
‑
第三驱动机构,2b
‑
第四驱动机构,3
‑
手指摆动机构,31
‑
第二驱动机构,32
‑
手指摆动板,321
‑
摆臂孔,322
‑
安装槽,33
‑
舵盘,331
‑
驱动柱,332
‑
舵盘主体,333
‑
卡接块,334
‑
卡接槽,4
‑
安装架,5
‑
穿线管。
具体实施方式
30.下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明,但不用来限制本发明的范围。
31.如图1
‑
5所示,本发明实施例优选实施例的一种包括手掌和手指,所述手掌上设有多个手指摆动机构,所述手指与所述手指摆动机构一一对应地连接所述手指摆动机构;
32.所述手指2包括第一驱动机构和依次转动连接的第一关节21、第二关节22、第三关节23,所述第三关节23转动连接所述手指摆动机构3,所述第一驱动机构用于驱动所述第一关节21、所述第二关节22及所述第三关节23转动,所述第二关节22与所述第三关节23之间、所述第三关节23与所述手指摆动机构3之间设有弹性件,所述弹性件用于复位。
33.基于上述技术特征的机械手,通过将第一关节21、第二关节22、第三关节23依次转动连接,并将第三关节23转动连接手指摆动机构3,同时通过第一驱动机构驱动第一关节1、第二关节2及第三关节3转动,使得手指能像人手一样实现每个关节的动作;同时,通过设置手指摆动机构3,并与手指2一一对应地连接,从而可实现手指2的摆动,提高了机械手的使用灵活度,增加了其应用范围。本发明结构简单,使用效果好,易于推广使用。
34.请参阅图3
‑
5,本实施例中,所述第一驱动机构包括用于驱动所述第一关节21的第一驱动组件25、驱动所述第二关节22的第二驱动组件26及用于驱动所述第三关节23的第三驱动组件27,具体地:
35.所述第一驱动组件25包括连接所述第一关节21及所述第二关节2的第一转轴251、套接在所述第一转轴251上的第一滚动轴承252、设置在所述第一关节21内部的第一安装座253、设置在所述第二关节22上的第一导向块254、第一牵引钢丝255和第五牵引钢丝(图中未标出),所述第一牵引钢丝255及所述第五牵引钢丝均穿过所述第一导向块254连接所述第一安装座253,且所述第一牵引钢丝255抵接在所述第一滚动轴承252的上侧,所述第五牵引钢丝抵接在所述第一滚动轴承252的下侧。所述第一牵引钢丝255及所述第五牵引钢丝的另一端连接动力装置,如舵机等,工作时舵机正反转,当其带动所述第一牵引钢丝255绕所述第一滚动轴承252实现对所述第一安装座253向上的牵引时,所述第一关节21向上运动,当其带动所述第五牵引钢丝时,控制所述第一关节21向下运动。当然,所述第一牵引钢丝255及所述第五牵引钢丝也可以是一根钢丝,绕在所述第一滚动轴承252上即可。
36.同理,所述第二驱动组件26包括连接所述第二关节22及所述第三关节23的第二转轴261、套接在所述第二转轴261上的第二滚动轴承262、设置在所述第二关节22内部的第二安装座263、设置在所述第三关节23上的第二导向块264、第二牵引钢丝265和第六牵引钢丝,所述第二牵引钢丝265就所述第六牵引钢丝均穿过所述第二导向块264连接所述第二安装座263,且所述第二牵引钢丝265抵接在所述第二滚动轴承262的上侧,所述第六牵引钢丝
抵接在所述第二滚动轴承262的下侧。所述第二牵引钢丝265也连接舵机,当舵机驱动所述第二牵引钢丝265运动时,所述第二关节22向上运动;当舵机驱动所述第六牵引钢丝运动时,所述第二关节22上下运动。所述第二牵引钢丝265及所述第六牵引钢丝也可以是一根钢丝。同时,所述第二转轴261上套接有第一扭簧266,所述第一扭簧266的两端分别抵接所述第二关节22及所述第三关节23,实现所述第二关节22的张紧与复位。
37.本实施例中,所述第三驱动组件27包括固设在所述手指摆动机构23(手指摆动板32)上的转动耳板271、连接所述转动耳板271及所述第三关节23的第三转轴272、套接在所述第三转轴272上的第三滚动轴承273、设置在所述第三关节23内部的第三安装座274、设置在所述转动耳板271两端的第三导向块275和第四导向块276、第三牵引钢丝277、第四牵引钢丝278,所述第三牵引钢丝277穿过所述第三导向块275连接所述第三安装座274,所述第四牵引钢丝278穿过所述第四导向块276连接所述第三安装座274,并绕接在所述第三滚动轴承273上。所述第三牵引钢丝277及所述第四牵引钢丝278各连接一个动力装置(舵机),其中,所述第三牵引钢丝277用于驱动所述第三关节23向上运动,所述第四牵引钢丝278用于驱动所述对三关节23向下运动。同时,所述第三转轴272上套接有第二扭簧279,所述第二扭簧279的两端分别抵接所述第三关节23及所述手指摆动板232,实现所述第三关节24的张紧与复位。
38.本实施例中,所述第一关节21远离所述第二关节22的一端设有夹持板211,所述夹持板211上设有防滑纹,从而方便对物品进行夹取。
39.需要说明的是,所述关节的数量可以不止三个(第一关节、第二关节及第三关节),也可以是两个、四个、五个等任意数量。
40.如图6所示,本实施例中,所述手指摆动机构3包括第二驱动机构31、手指摆动板32及舵盘33,所述手指摆动板32的一端与所述手掌1铰接,所述手指摆动板32的另一端连接所述手指2,所述第二驱动机构31通过所述舵盘33驱动所述手指摆动板32摆动,实现所述手指2的摆动。所述第二驱动机构31优选舵机。通过设置手指摆动板32,并将手指摆动板32的一端与所述手手掌1铰接,另一端连接所述手指2,需要摆动时第二驱动机构31驱动所述舵盘33,所述舵盘33驱动手指摆动板32带动3手指2摆动,从而使得所述手指2能像人手一样实现摆动,从而提高了其使用灵活度,增加了其应用范围。
41.请参阅附图7,本实施例中,所述手指摆动板32的中部沿其长度方向设有摆臂孔321,所述舵盘33上设有驱动柱331,所述驱动柱331滑接于所述摆臂孔321内。摆动时所述第二驱动机构31驱动所述舵盘33转动,使得所述驱动柱331绕所述舵盘3的中心转动,由于其设于所述摆臂孔321内,从而驱动所述手指摆动板32绕其与所述手掌1的铰接点转动,实现了所述手指2的摆动。较佳地,所述摆臂孔321为腰型孔,若其长度为a,宽度为b,则其之间满足a:b=3.5:1
‑
4.5:1,优选4:1。
42.请参阅附图8,本实施例中,所述舵盘33包括舵盘主体332,所述舵盘主体332的上表面用于连接所述第二驱动机构31,所述驱动柱331设置在所述舵盘主体332的下表面。为便于与所述第二驱动机构31安装,所述舵盘主体332的上表面设有卡接块333,所述卡接块333内设有多边形卡接槽334(如三角形、四边形),所述第二驱动机构31的输出轴插接在所述卡接槽334内。同时,所述手指摆动板32连接所述手指2的一端设有多个安装槽322,所述手指2的所述转动耳板271与所述安装槽322连接,安装简单方便。
43.本实施例中,所述手指2为仿人手结构,其包括拇指28、食指、中指、无名指和小指,食指、中指、无名指和小指均通过所述手指摆动机构3连接所述手掌1,不过所述拇指的摆动动作与食指、中指、无名指和小指不同,所以其摆动结构不同,具体地:
44.所述拇指28的所述第三关节23上设有固定板29,所述手掌1上对应所述拇指28设有第一摆轴,所述第一摆轴的另一端连接所述固定板29,所述第一摆轴上套接有第一转盘,所述第一转盘连接第三驱动机构2a。所述拇指28需要左右摆动时所述第三驱动机构2a启动,驱动所述第一转盘带动所述第一摆轴转动,所述第一摆轴带动所述固定板29与所述拇指28一起转动,实现所述拇指28的左右摆动。同时,所述固定板29通过支撑杆连接第二摆轴,所述第二摆轴的另一端连接所述拇指28的第三关节23,所述第二摆轴上套接有第二转盘,所述第二转盘连接第四驱动机构2b。当所述拇指28需要上下摆动时所述第四驱动机构2b启动,驱动所述第二转盘带动所述第二摆轴转动,所述第二摆轴带动所述拇指28绕所述第二转轴转动,实现了所述拇指28的上下转动。所述第三驱动机构2a及所述第四驱动机构2b均优选舵机,舵机与所述第一转盘及所述第二转盘之间均通过钢丝连接。
45.本实施例中,所述手掌1上设有安装架4,所述第一驱动机构、所述第二驱动机构31、所述第三驱动机构2a及所述第四驱动机构2b均设置在所述安装架4上。同时,本技术中所有的动力机构均采用舵机。
46.另外,为方便舵机驱动相应的手指关节,各牵引钢丝上应套设穿线管5(刹车线管),所述穿线管5包括钢丝内管,钢丝内管外表面套设橡胶管,所述穿线管5的一端抵靠相应的舵机,另一端抵靠相应的导向块,需要驱动相应的关节运动时相应的舵机启动,钢丝内管不会产生相对伸缩,从而使得舵机驱动相应的牵引钢丝带动相应的关节移动,实现各手指的工作。
47.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和替换,这些改进和替换也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。