1.本技术涉及门锁制造的领域,尤其是涉及一种精密全自动加工铝门锁自动机。
背景技术:
2.目前门锁应用广泛,可以是大家每天都可以见到的,门锁生产时,需要对锁件进行打孔,现在常见的锁件打孔是通过打孔机进行打孔。
3.现在常见的一种打孔机包括放置台、设置在放置台上机体,放置台上固定设置有固定块,放置台上滑移设置有抵紧块,抵紧块上螺纹连接有转杆,转杆端部转动设置在固定块上,转杆进行转动时,抵紧块能够朝向固定块一侧进行移动。锁件放置在抵紧块和固定块之间,工作人员转动转杆让抵紧块抵紧锁件,从而将锁件固定,再驱动打孔机对锁件进行打孔。
4.针对上述中的相关技术,发明人认为存在有还需人手转动转杆,造成不方便固定锁件的缺陷。
技术实现要素:
5.为了方便固定锁件,本技术提供的一种精密全自动加工铝门锁自动机采用如下的技术方案:
6.一种精密全自动加工铝门锁自动机,包括放置台、设置在放置台上的进料装置、推料装置、夹持装置、冲孔装置和出料装置,所述放置台上设置有支撑架,所述夹持装置包括上板、下板、安装板,所述安装板设置在支撑架上,所述下板固定设置在安装板上,所述安装板侧壁上固定设置有固定杆,所述固定杆上铰接设置有连接杆,所述连接杆上固定设置有安装杆,所述安装板上固定设置有连接板,所述上板铰接设置在连接板上,所述安装杆抵触在上板,所述安装板上转动设置有第一气缸,所述第一气缸的伸缩轴铰接设置在连接杆上,所述连接杆转动时带动上板朝向下板一侧进行移动,锁件放置在上板和下板之间。
7.通过采用上述技术方案,锁件放入下板和上板之间后,驱动第一气缸,第一气缸的伸缩轴伸出带动连接杆进行转动,从而带动安装杆进行转动,安装杆带动上板朝向下板一侧进行移动,从而将锁件夹紧,达到方便固定锁件的效果。
8.优选的,所述冲孔装置包括冲孔机、竖直固定设置在支撑架上的支撑杆,所述冲孔机固定设置在支撑杆上,所述冲孔机的冲头朝向锁件,所述上板开设有让位孔,所述冲头与让位孔对齐。
9.通过采用上述技术方案,锁件固定在上板和下板之间后,驱动冲孔机,冲孔机的冲头向下移动,穿过让位孔对锁件进行打孔,达到锁件冲孔的效果。
10.优选的,所述出料装置包括第二气缸、推料杆,所述推料杆固定连接在第二气缸的伸缩轴上,所述第二气缸伸缩轴伸出时,所述推料杆推动锁件脱离上板和下板之间。
11.通过采用上述技术方案,当锁件加工结束后,驱动第一气缸,让下板朝向远离上板一侧移动,再驱动第二气缸,让推料杆朝向锁件一侧进行移动,将锁件从上板和下板之间推
出,达到方便出料的效果。
12.优选的,所述支撑架的上固定设置有电机,所述电机的转动轴垂直于推料杆,所述安装板上固定设置有连接块,所述连接块螺纹连接在电机转轴上,所述支撑架上设置有用于防止连接块转动的限位件。
13.通过采用上述技术方案,驱动电机,电机的转轴进行转动,连接块在限位件的作用下跟随电机的转轴进行移动,安装板跟随连接块进行移动,达到方便锁件移动的效果。
14.优选的,所述推料装置包括第三气缸、设置在放置台上的移动板、推动块,所述推动块固定连接在第三气缸的伸缩轴上,所述第三气缸固定连接在移动板上,锁件放置在移动板上,所述第三气缸的伸缩轴伸出时,所述推动块推动锁件进入上板和下板之间中,所述第二气缸的伸缩轴与推料杆平行。
15.通过采用上述技术方案,锁件放置在移动板上,驱动第三气缸的伸缩轴伸出,推动块推动锁件朝向下板一侧进行移动,直至锁件进入上板和下板之间,达到方便锁件进料的效果。
16.优选的,所述放置台上固定设置有第四气缸,所述第四气缸的伸缩轴固定连接在移动板上,所述第四气缸伸缩轴伸出时,所述移动板朝向下板一侧进行移动。
17.通过采用上述技术方案,锁件进入下板和上板时,驱动第四气缸,让移动板朝向下板一侧移动,移动板与下板接触时,再驱动第三气缸,将锁件推至下板上,减少锁件下侧悬空,达到稳定锁件进入下板的效果。
18.优选的,所述移动板上开设有放料槽,所述锁件放置在放料槽中。
19.通过采用上述技术方案,锁件移动时,放料槽能够减少锁件的晃动,达到稳定锁件移动的效果。
20.优选的,所述进料装置包括固定设置在放置台上的导料板,所述导料板倾斜设置,所述导料板在放置台上对应设置有两个,两个导料板相对之间开设有导料槽,所述导料板下端位于放料槽的上方。
21.通过采用上述技术方案,锁件的原件放置在导料槽中,加工时,锁件沿着导料槽下滑至导料槽中,达到方便锁件进入导料槽中的效果。
22.综上所述,本技术包括以下至少一种有益技术效果:锁件放入下板和上板之间后,驱动第一气缸,第一气缸的伸缩轴伸出带动连接杆进行转动,从而带动安装杆进行转动,安装杆带动上板朝向下板一侧进行移动,从而将锁件夹紧,达到方便固定锁件的效果。
附图说明
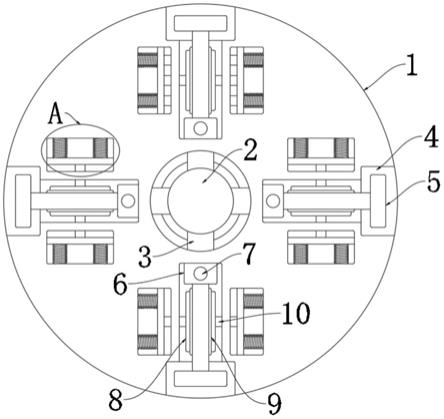
23.图1是本实施例中夹持装置的安装位置示意图。
24.图2是本实施例中夹持装置的结构示意图。
25.图3是本实施例中螺杆的安装结构示意图。
26.图4是本实施例中第一气缸的安装结构示意图。
27.图5是图1中a的放大示意图。
28.图6是本实施例中推料装置的结构示意图。
29.图7是图6中b的放大示意图。
30.图8是图1中c 的放大示意图。
31.附图标记:1、放置台;2、支撑架;3、竖板;4、放置板;5、横板;6、上板;7、下板;8、安装板;9、导向条;10、导向槽;11、固定块;12、连接板;13、导向板;14、让位槽;15、连通孔;16、转动杆;17、固定杆;18、第一气缸;19、连通板;20、导向杆;21、连接杆;22、安装杆;23、通过孔;24、锁件;25、电机;26、螺杆;27、连接块;28、连接孔;29、限位槽;30、冲孔机;31、冲头;32、支撑杆;33、让位孔;34、第二气缸;35、推料杆;36、第三气缸;37、移动板;38、推动块;39、第四气缸;40、支撑板;41、导料板;42、导料槽;43、进料装置;44、夹持装置;45、推料装置;46、冲孔装置;47、出料装置。
具体实施方式
32.以下结合附图1
‑
8对本技术作进一步详细说明。
33.本技术实施例公开一种精密全自动加工铝门锁自动机,参照图1和图2,包括放置台1、设置在放置台1上的进料装置43、推料装置45、夹持装置44、冲孔装置46、出料装置47,放置台1上有支撑架2,支撑架2包括两个竖板3、一个横板5、一个放置板4,两个竖板3分别垂直固定连接在横板5和放置板4上,放置板4位于横板5的上方。横板5的下方固定连接在放置台1上,放置板4与两个竖板3一体成型。
34.参照图2和图3,具体的,夹持装置44包括上板6、下板7、安装板8,竖板3的侧壁上水平固定设置有导向条9,安装板8上开设有导向槽10,导向条9位于导向槽10中。下板7上的侧壁上固定设置有固定块11,固定块11固定连接在安装板8上,固定块11上固定设置有连接板12,连接板12一侧固定连接在安装板8上。上板6上垂直固定设置有导向板13,导向板13与上板6一体成型,连接板12上竖直开设有让位槽14,导向板13竖直插接在导向槽10中。
35.参照图3和图4,具体的,导向板13水平开设有转动孔(图中未示出),连接板12上水平开设有连通孔15,连通孔15与让位槽14相通,连通孔15上固定设置有转动杆16,转动杆16插接在转动孔中,导向板13与连接板12之间留有一定的间隙,以保证导向板13能够进行转动。安装板8朝向连接板12的一侧侧壁上固定设置有固定杆17,安装板8的侧壁上设置有第一气缸18,第一气缸18上固定设置有连通板19,连通板19上固定设置有导向杆20,导向杆20转动设置在安装板8上。
36.参照图3和图4,具体的,第一气缸18的伸缩轴上铰接设置有连接杆21,连接杆21的端部铰接设置在固定杆17上,连接杆21的端部上固定连接有安装杆22,固定块11上开设有通过孔23,安装杆22穿过通过孔23抵触在导向板13上,通过孔23大于安装杆22,保证安装杆22能够在通过孔23中进行转动。锁件24放置在下板7上时,驱动第一气缸18,让第一气缸18的伸缩轴带动连接杆21进行转动,从而让安装杆22跟随连接杆21进行转动,安装杆22推动导向板13进行转动,从而让上板6朝向下板7一侧进行转动,将锁件24抵紧,达到方便固定锁件24的效果。
37.参照图3和图4,具体的,放置板4的侧壁上固定设置有电机25,电机25一侧固定设置在竖板3上,电机25的转轴上同轴固定设置有螺杆26,安装板8朝向竖板3的一侧侧壁上固定设置有连接块27,连接块27上开设有连接孔28,螺杆26螺纹连接在连接孔28上。竖板3上设置有防止连接块27转动的限位件,本实施例中的限位件为限位槽29,限位槽29开设在竖板3的侧壁上,连接块27位于限位槽29中。驱动电机25,螺杆26进行转动时,限位槽29能够防止连接块27进行转动,连接块27沿着螺杆26进行移动,此时安装板8跟随连接块27进行移
动,达到方便调节锁件24加工位置的效果。
38.参照图3和图4,具体的,在安装板8进行移动时,导向条9位于导向槽10能够减少安装板8的晃动,达到稳定安装板8移动的效果。
39.参照图1和图2,具体的,冲孔装置46包括冲孔机30、竖直固定设置在放置板4上的支撑杆32,冲孔机30固定设置在支撑杆32上,上板6上开设有让位孔33,本实施例中的冲孔机30的冲头31朝下。锁件24进行冲孔时,驱动电机25,让夹持装置44夹持锁件24朝向冲孔机30因此而移动,直至冲头31与让位孔33对齐,驱动冲孔机30的冲头31转动同时下移,对锁件24进行加工,达到锁件24打孔的效果。
40.参照图5和图6,具体的,出料装置47包括第二气缸34、推料杆35,第二气缸34固定设置在放置台1上,推料杆35固定连接在第二气缸34的伸缩轴上。锁件24加工完后,驱动电机25,让安装板8移动至第二气缸34的伸缩轴处,驱动第一气缸18,让上板6脱离锁件24,再驱动第二气缸34伸缩轴伸出,推料杆35朝向锁件24一侧进行移动,直至推动锁件24脱离下板7,达到锁件24脱离下板7的效果。
41.参照图6和图7,具体的,推料装置45包括第三气缸36、设置在放置台1上的移动板37、推动块38,推动块38固定连接在第三气缸36的伸缩轴上,移动板37滑移设置在放置台1上,放置台1上固定设置有第四气缸39,第四气缸39的伸缩轴与第二气缸34的伸缩轴平行。第四气缸39的伸缩轴端部固定连接在移动板37上,驱动第四气缸39让移动板37朝向安装板8一侧进行移动,在移动板37朝向安装板8一侧进行移动时,移动板37始终与放置台1接触。
42.参照图6和图7,具体的,第三气缸36固定连接在移动板37上,在锁件24放置在移动板37上时,驱动第三气缸36,让推动块38朝向锁件24一侧进行移动,推动块38推动锁件24进行移动,推动块38的形状与锁件24相似,能够减少锁件24移动时的晃动。锁件24要进入下板7和上板6之间时,驱动电机25,让下板7移动至靠近移动板37处,驱动第四气缸39,让移动板37朝向下板7一侧进行移动直至与连接板12接触,再驱动第三气缸36,让推动块38推动锁件24进入上板6和下板7之间中,达到方便锁件24进料的效果。
43.参照图6和图7,具体的,移动板37上开设有放料槽(图中未示出),放料槽与锁件24的形状相似,锁件24放置在放料槽中,锁件24进行移动时,放料槽能够进一步减少锁件24的晃动,达到稳定锁件24移动的效果。
44.参照图6和图8,具体的,进料装置43包括固定设置在移动板37上表面的导料板41,导料板41的下侧固定设置有支撑板40,支撑板40固定设置在放置台1上,导料板41倾斜设置,导料板41的下端位于移动板37的上方,导料板41在放置台1板上对应设置有两个。两个导料板41相对之间开设有导料槽42,导料槽42靠近放料槽,多个锁件24预先放置在两个导料槽42之间,推动块38在导料板41下侧进行移动,在推动块38进推动锁件24进入下板7之间时,推动块38可对导料板41下侧进行阻挡,防止后续的锁件24下落。
45.参照图6和图8,具体的,当推动块38送料脱离导料板41的下侧后,导料槽42中的锁件24可继续下落到放料槽中,推动块38继续推动锁件24进入下板7中,达到方便锁件24进料的效果。
46.本技术实施例一种精密全自动加工铝门锁自动机的实施原理为:驱动电机25让安装板8朝向移动板37一侧移动,锁件24从导料槽42中落到放料从中,驱动第四气缸39让移动板37移动至与连接板12接触,驱动第三气缸36推动锁件24进入下板7上。驱动第一气缸18,
第一气缸18的伸缩轴进行收缩,从而带动连接杆21进行转动,让安装杆22推动导向板13进行转动,最后让上板6朝向下板7一侧进行转动,将锁件24抵紧,达到方便固定锁件24的效果。
47.锁件24固定后,驱动电机25,让安装板8朝向冲孔机30一侧进行移动,当让位孔33与冲孔机30的冲头31对齐时,驱动冲孔机30对锁件24进行冲孔。当锁件24经过一系列的加工结束后,驱动电机25,让安装板8朝向第二气缸34进行移动,驱动第一气缸18伸出,让上板6脱离抵紧锁件24,再驱动第二气缸34,让推料杆35朝向锁件24一侧进行移动,将锁件24从下板7上推出,达到方便出料的效果。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。