1.本实用新型涉及农业机械收获技术领域,具体而言,涉及一种全地形农机的转向装置。
背景技术:
2.随着无人农场的发展,无人驾驶技术在农机上的应用越来越广泛。在农机中,转向系统的功能是按照驾驶员的意愿控制农机的行驶方向。现有的转向系统不论是机械转向系统还是动力转向系统都要依靠转向节臂和横拉杆才能实现转向。其结构复杂,响应速度慢,制造成本高,维修繁琐
技术实现要素:
3.本实用新型的目的在于提供一种全地形农机的转向装置,取消了现有转向装置的转向节臂,横拉杆,转向拉杆等结构。
4.为实现上述目的,本实用新型的技术方案是:
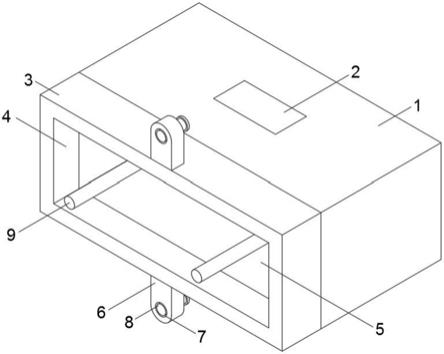
5.一种全地形农机的转向装置,包括驱动车轮转动并与车轮同芯布置的驱动轴承,驱动轴承上固定设置有立式布置的转向轴,舵机驱动转向轴转动。
6.上述方案中立式布置的转向轴转动从而带动驱动轴承摆动从实现车轮的转向,取消了现有转向装置的转向节臂,横拉杆,转向拉杆等结构,采用转动装置的输出轴与转向轴连接的方式驱动车轮转向。即舵机转角就是车轮在地面上的转动角度。
7.所述舵机安装在舵机安装板上,舵机安装板的水平轴与上臂的一端铰接,舵机安装板上设置有与上臂构成卡簧连接的卡簧槽,舵机的输出轴与驱动轴承的第一转向轴孔连接。这样布置减震机构时车轮能够上下摆动。
8.所述舵机安装板的第二转向轴孔与驱动轴承的上转向轴构成转动连接。
9.驱动轴承的下转向轴插入转向轴承的轴承孔,转向轴承与下臂的一端铰接,其铰接轴方向平行于车长方向,下转向轴的下端设置有轴向固定键,轴向固定键上开设有供螺丝穿过的孔,下转向轴的下端对应孔设置有螺纹孔。这样布置减震机构时车轮能够上下摆动。
10.所述轴向固定键上表面设置有定位凸台与下转向轴的凹面构成周向定位配合。防止定位凸台因振动而转动从而带动螺丝转动脱落。
11.轴向固定键的上表面与转向轴承的台阶面贴合,转向轴承的上表面与驱动轴承的下轴向凸台底面贴合。这样三者能够构成轴向定位。
12.所述舵机安装板由两个哈夫式半体合围构成,哈夫式半体上设置有用于相互螺纹连接的螺栓孔,舵机安装板还设置有用于连接舵机的螺丝孔。便于安装舵机安装板,同时也便于后期维修和保养,舵机安装板损坏时只需拆除舵机安装板无需拆除其他结构。
13.所述舵机安装板的轴向固定面和底面分别与驱动轴承的凸台面及上轴向凸台底面贴合构成轴向固定。所述转向轴承与驱动轴承的下转向轴的轴向固定。
14.上述方案的优点在于:结构简单,响应速度快,制造成本低,维修简单,可以根据实际需要灵活配置来实现两轮转向或四轮转向。
附图说明
15.图1为本发明的爆炸视图和整体结构图;
16.图2为本发明的舵机安装板爆炸视图;
17.图3为本发明的驱动轴承轴测图;
18.图4为本发明的转向轴承基本视图;
19.图5为本发明的轴向固定键轴测图;
20.图6为本发明的四轮转向模式的原理示意图;
21.图7为本发明的高速并线模式的原理示意图;
22.图8为本发明的原地转向模式的原理示意图。
23.图中:上臂1;舵机2;舵机安装板3;驱动轴承4;转向轴承5;轴向固定键6;下臂7;螺丝孔31;轴向固定面32;水平轴33;卡簧槽34;第二转向轴孔35;螺栓孔36;底面37;第一转向轴孔41;上转轴42;上轴向凸台底面43;轴承孔44;凸台面45;下轴向凸台底面46;下转向轴47;螺纹孔48;下转向轴凹面49;台阶面51;铰接轴52;卡簧槽53;上表面54;轴承孔55;定位凸台61;上表面62;孔63。
具体实施方式
24.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
25.请参阅图1
‑
8所示,
26.一种全地形农机的转向装置,包括驱动车轮转动并与车轮同芯布置的驱动轴承4,驱动轴承4上固定设置有立式布置的转向轴,舵机2驱动转向轴转动。
27.上述方案中立式布置的转向轴转动从而带动驱动轴承4摆动从实现车轮的转向,取消了现有转向装置的转向节臂,横拉杆,转向拉杆等结构,采用转动装置的输出轴与转向轴连接的方式驱动车轮转向。即舵机转角就是车轮在地面上的转动角度。其结构简单,响应速度快,制造成本低,维修简单,可以根据实际需要灵活配置来实现两轮转向或四轮转向。
28.所述舵机2安装在舵机安装板3上,舵机安装板3的水平轴33与上臂1的一端铰接,舵机安装板3上设置有与上臂1构成卡簧连接的卡簧槽34,舵机2 的输出轴与驱动轴承的第一转向轴孔41连接。这样布置减震机构时车轮能够上下摆动。
29.所述舵机安装板3的第二转向轴孔35与驱动轴承4的上转向轴42构成转动连接。
30.驱动轴承4的下转向轴47插入转向轴承5的轴承孔55,转向轴承5与下臂 7的一端铰接,其铰接轴52方向平行于车长方向,下转向轴47的下端设置有轴向固定键6,轴向固定键6上开设有供螺丝穿过的孔63,下转向轴47的下端对应孔63设置有螺纹孔48。这样布置减震机构时车轮能够上下摆动。
31.所述轴向固定键6上表面设置有定位凸台61与下转向轴47的凹面49构成周向定位
配合。防止定位凸台61因振动而转动从而带动螺丝转动脱落。
32.轴向固定键6的上表面62与转向轴承5的台阶面51贴合,转向轴承5的上表面54与驱动轴承4的下轴向凸台底面46贴合。这样三者能够构成轴向定位。
33.所述舵机安装板3由两个哈夫式半体合围构成,哈夫式半体上设置有用于相互螺纹连接的螺栓孔36,舵机安装板3还设置有用于连接舵机2的螺丝孔31。便于安装舵机安装板3,同时也便于后期维修和保养,舵机安装板3损坏时只需拆除舵机安装板3无需拆除其他结构。
34.所述舵机安装板3的轴向固定面32和底面37分别与驱动轴承的凸台面45 及上轴向凸台底面43贴合构成轴向固定。所述转向轴承5与驱动轴承的下转向轴47的轴向固定。
35.无人驾驶模式下的控制步骤如下:
36.a.当ecu根据行驶路线选择四轮转向模式时,控制前轮的两个舵机转动 arctan(l/d),而后轮的两个舵机转动arctan(l/d),但后轮的两个舵机与前轮的两个舵机转向相反,l表示汽车轴距,d表示轮距,完成四轮转向。
37.b.当ecu根据行驶路线选择高速并线模式时,控制前轮的两个舵机转动 arctan(l/d),而后轮的两个舵机转动arctan(l/d),此时后轮的两个舵机与前轮的两个舵机转向相同,完成高速并线。
38.c.当ecu根据行驶路线选择原地转向模式时,控制前左车轮和右后车轮的两个舵机转动arctan(l/d),而前右车轮和右后车轮的两个舵机转动arctan (l/d),此时前左和右后车轮的两个舵机与前右和左后车轮的两个舵机转向相反,完成原地转向。
39.在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
40.以上内容仅仅是对本实用新型所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离实用新型或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。