1.本实用新型涉及连接器加工设备技术领域,尤其涉及一种下料装置及自动焊接设备。
背景技术:
2.在连接器的加工过程中,有时需要将两个壳体焊接在一起,对连接器的两个壳体焊接时,现有的焊接方式一般是通过人工加锡焊接,或者半自动焊接,将两个壳体焊接完成后若采用手动下料,会导致焊接效率较低。
3.因此,亟需一种下料装置能够完成对壳体的自动下料。
技术实现要素:
4.本实用新型的目的在于提出一种下料装置,能够实现对壳体的自动下料,提高加工效率。
5.本实用新型的另一个目的在于提出一种自动焊接设备,通过设置上述的下料装置,能够使焊接后的壳体自动下料,提高加工效率。
6.为达此目的,本实用新型采用以下技术方案:
7.一种下料装置,包括载具、分离机构和取放料机构,所述载具包括载具本体、定位件和压接件,所述定位件设置于所述载具本体上;所述压接件的中部转动连接于所述载具本体,所述压接件的压接端压接在所述定位件上,转动所述压接件时,所述压接件的压接端能够和所述定位件分离;分离机构设置于所述载具的一侧,所述分离机构能够将所述定位件和所述压接件分离;取放料机构设置在所述载具的一侧,所述取放料机构能够将位于所述定位件上的所述壳体取出。
8.可选地,所述定位件分为两个定位部,两个所述定位部间隔设置于所述载具本体的顶部。
9.可选地,所述载具本体的顶端开设有安装槽,所述压接件包括连接体和压爪,连接体安装在所述安装槽内,且所述连接体的中部转动连接于所述载具本体,所述连接体远离所述压接端的一端底部和所述安装槽的槽底之间设置有弹性复位件;所述压爪设置于所述连接体的压接端,所述压爪压接在所述定位件上;
10.其中,所述分离机构的执行端能够按压所述连接体设置有所述弹性复位件的一端以将所述压接端和所述定位件分离。
11.可选地,所述压接件还包括转动轴,所述连接体朝向所述安装槽的槽底的一侧设置有凸耳,所述转动轴穿设于所述载具本体和所述凸耳。
12.可选地,所述连接体背离所述弹性复位件的一侧开设有按压槽,所述分离机构的执行端能够抵压在所述按压槽内。
13.可选地,所述分离机构包括分离座、分离驱动件和分离驱动杆,分离座设置在所述载具的一侧;所述分离驱动件连接于所述分离座;分离驱动杆连接于所述分离驱动件的输
出端,所述分离驱动件能够驱动所述分离驱动杆沿竖直方向往复移动,所述分离驱动杆按压所述压接件时能够将所述压接端和所述定位件分离。
14.可选地,所述分离机构还包括分离滑块和分离导向块,所述分离滑块的一端连接于所述分离驱动件的执行端,另一端连接于所述分离驱动杆;所述分离导向块连接于所述分离座且与所述分离座之间形成有导向孔,所述分离滑块滑动穿设在所述导向孔内。
15.可选地,所述取放料机构包括取料座、第一直线驱动组件、第二直线驱动组件和夹持组件,取料座设置于所述载具的一侧;第一直线驱动组件连接于所述取料座;第二直线驱动组件连接于所述第一直线驱动组件的输出端,所述第一直线驱动组件能够驱动所述第二直线驱动组件沿靠近或远离所述载具的水平方向移动;夹持组件连接于所述第二直线驱动组件的输出端,所述第二直线驱动组件能够驱动所述夹持组件沿竖直方向移动,所述夹持组件能够松开或夹持所述壳体。
16.可选地,还包括收集机构,所述收集机构设置于所述取放料机构的执行端下方。
17.一种自动焊接设备,包括上述的下料装置。
18.本实用新型的有益效果为:
19.本实用新型的下料装置包括载具、分离机构和取放料机构,载具包括载具本体、定位件和压接件,定位件设置于载具本体上;压接件的中部转动连接于载具本体,压接件的压接端压接在定位件上,转动压接件时,压接件的压接端能够和定位件分离,对壳体进行焊接时,壳体夹紧在压接端和定位件之间,从而便于对壳体进行焊接,焊接完成后,通过分离机构可以驱动压接端和压接件分离,从而使取放料机构能够将位于定位件上的壳体取出,实现了对壳体的自动下料,提高加工效率。
20.本实用新型的自动焊接设备,通过设置上述的下料装置,实现了对壳体的自动下料,提高了加工效率。
附图说明
21.图1是第一壳体和第二壳体的爆炸图;
22.图2是本实用新型具体实施方式提供的自动焊接设备的立体结构示意图;
23.图3是本实用新型具体实施方式提供的自动焊接设备在去掉底部机架后的立体结构示意图;
24.图4是本实用新型具体实施方式提供的自动焊接设备的旋转盘、固定盘和载具的立体结构示意图;
25.图5是本实用新型具体实施方式提供的固定有第一壳体的载具的立体结构示意图;
26.图6是本实用新型具体实施方式提供的载具的爆炸图;
27.图7是本实用新型具体实施方式提供的旋转盘、固定盘、载具、抵压装置和分离机构的立体结构示意图;
28.图8是本实用新型具体实施方式提供的分离机构的立体结构示意图;
29.图9是本实用新型具体实施方式提供的第一上料裁切装置的立体结构示意图;
30.图10是本实用新型具体实施方式提供的第一上料裁切装置另一视角的立体结构示意图;
31.图11是本实用新型具体实施方式提供的第一上料裁切装置在去掉第一供料组件后的爆炸图;
32.图12是本实用新型具体实施方式提供的第一输料组件的爆炸图;
33.图13是本实用新型具体实施方式提供的自动焊接设备在去掉第一上料裁切装置和第二上料裁切装置后的立体结构示意图;
34.图14是本实用新型具体实施方式提供的第一折料装置和抵压装置的立体结构示意图;
35.图15是本实用新型具体实施方式提供的第一折料装置的立体结构示意图;
36.图16是本实用新型具体实施方式提供的第一折料装置的爆炸图;
37.图17是本实用新型具体实施方式提供的抵压装置的立体结构示意图;
38.图18是本实用新型具体实施方式提供的第二折料装置和第二上料裁切装置的立体结构示意图;
39.图19是本实用新型具体实施方式提供的中转夹持机构和第二上料裁切装置的立体结构示意图;
40.图20是本实用新型具体实施方式提供的第二折料装置的爆炸图;
41.图21是本实用新型具体实施方式提供的下料装置的立体结构示意图。
42.图中:
43.100、第一壳体;200、第二壳体;
44.1、工作台;2、旋转盘;
45.3、下料装置;31、载具;311、载具本体;3111、安装槽;3112、定位孔;312、定位件;3121、定位槽;3122、定位柱;313、压接件;3131、连接体;31311、按压槽;3132、压爪;3133、铰接轴;314、弹性复位件;32、取放料机构;321、取料座;322、第一直线驱动组件;323、第二直线驱动组件;324、夹持组件;33、分离机构;331、分离座;332、分离驱动件;333、分离驱动杆;334、分离滑块;335、分离导向块;34、收集机构;
46.4、第一上料裁切装置;41、底座;42、上料机构;421、输料组件;4211、输料支座;4212、输料底板;4213、输料上盖;42131、避让槽;4214、导向通道;4215、输料驱动结构;42151、输料驱动件;42152、拨料组件;421521、连接座;4215211、第一连接槽;421522、拨块;42153、连接板;42154、顶升块;421541、台阶面;422、供料组件;4221、料盘;4222、输送轨道;4223、料盘驱动件;43、裁切机构;431、裁切框架;432、上裁切刀;433、下裁切刀驱动组件;4331、裁切驱动件;4332、连接块;4333、滚轮;4334、驱动块;434、第一下裁切刀;435、第一上压块;436、压块驱动件;44、第一推送机构;
47.5、第一折料装置;51、第一弯折座;52、第一弯折驱动机构;521、第一弯折驱动组件;5211、第一旋转驱动部;5212、第一偏心轮;522、第一驱动板;5221、第一腰形槽;523、第一限位件;53、第一夹持机构;
48.6、第二折料装置;61、弯折机构;611、第二弯折座;612、第二弯折驱动结构;6121、第二弯折驱动组件;61211、第二旋转驱动部;61212、第二偏心轮;6122、第二驱动板;61221、第二腰形槽;6123、第二限位件;613、第二夹持机构;62、中转夹持机构;621、夹块升降驱动件;622、上夹块;623、下夹块;624、夹块平移驱动件;63、中转旋转驱动机构;64、中转板;
49.7、第二上料裁切装置;71、第二推送机构;
50.8、固定盘;
51.9、第一检测装置;
52.10、第二检测装置;
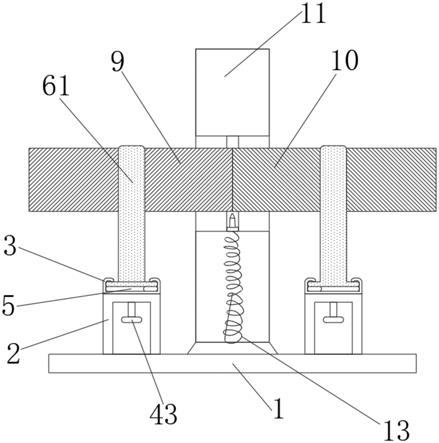
53.11、抵压装置;111、抵压座;112、抵压驱动机构;113、抵压部;
54.12、第一定位架;13、第二定位架;
55.14、矫正装置;141、校正块;142、校正柱;
56.15、焊接装置;
57.16、防护装置;161、防护板;162、遮蔽机构;1621、遮蔽件;1622、遮蔽驱动件。
具体实施方式
58.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。其中,术语“第一位置”和“第二位置”为两个不同的位置。
59.除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
60.除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一特征和第二特征直接接触,也可以包括第一特征和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
61.下面结合附图图1
‑
图21并通过具体实施方式来进一步说明本实用新型的技术方案。
62.本实施例提供了一种下料装置,如图5、图6和图21所示,下料装置3包括载具31、分离机构33和取放料机构32,载具31包括载具本体311、定位件312和压接件313,定位件312设置于载具本体311上。压接件313的中部转动连接于载具本体311,压接件313的压接端压接在定位件312上,转动压接件313时,压接件313的压接端能够和定位件312分离。分离机构33设置于载具31的一侧,分离机构33能够将定位件312和压接件313分离。取放料机构32设置在载具31的一侧,取放料机构32能够将位于定位件312上的壳体取出。
63.本实施例通过载具31将壳体固定,从而便于对产品进行焊接,壳体焊接完成后,通过分离机构33可以驱动压接端和压接件313分离,从而使取放料机构32能够将位于定位件312上的壳体取出,实现了对壳体的自动下料,提高了加工效率。
64.进一步地,定位件312分为两个定位部,两个定位部间隔设置于载具本体311的顶
部。通过两个定位部的设置可以对第一壳体100和/或第二壳体200的两端分别进行定位。
65.更进一步地,定位部的顶部开设有定位槽3121,定位槽3121内设置有定位柱3122。可以理解的是,第一壳体100的两端盖设在定位柱3122上,第一壳体100两端的侧壁设置在定位槽3121内,通过定位柱3122和定位槽3121配合对第一壳体100进行定位。
66.如图5和图6所示,载具本体311的顶端开设有安装槽3111,压接件313包括连接体3131和压爪3132,连接体3131安装在安装槽3111内,且连接体3131的中部转动连接于载具本体311,连接体3131远离压接端的一端底部和安装槽3111的槽底之间设置有弹性复位件314。压爪3132设置于连接体3131的压接端,压爪3132压接在定位件312上。按压连接体3131设置于弹性复位件314的一端,可以使压爪3132远离定位件312,从而便于壳体的取放,松开连接体3131,在弹性复位件314的作用下,压爪3132复位压接到定位件312上,可以对壳体进行固定。其中,分离机构33的执行端能够按压连接体3131设置有弹性复位件314的一端以将压爪3132和定位件312分离,实现了压爪3132和定位件312的自动分离。
67.如图5和图6所示,压接件313还包括转动轴,连接体3131朝向安装槽3111的槽底的一侧设置有凸耳,转动轴穿设于载具本体311和凸耳,从而使连接体3131可绕转动轴转动。特别地,载具本体311相对的两侧朝向安装槽3111凹设,且凹设的位置对应转动轴的两端,可以减少转动轴的长度,降低成本。
68.特别地,连接体3131背离弹性复位件314的一侧开设有按压槽31311,分离机构33的执行端能够抵压在按压槽31311内,以便于分离机构33按压连接体3131。
69.在一些可选的实施例中,如图8和图21所示,分离机构33包括分离座331、分离驱动件332和分离驱动杆333,分离座331设置在载具31的一侧。分离驱动件332连接于分离座331。分离驱动杆333连接于分离驱动件332的输出端,分离驱动件332能够驱动分离驱动杆333沿竖直方向往复移动,分离驱动杆333按压压接件313时能够将压接端和定位件312分离。
70.为了使分离驱动杆333能够稳定的移动,如图21所示,分离机构33还包括分离滑块334和分离导向块335,分离滑块334的一端连接于分离驱动件332的执行端,另一端连接于分离驱动杆333。分离导向块335连接于分离座331且与分离座331之间形成有导向孔,分离滑块334滑动穿设在导向孔内。
71.如图21所示,取放料机构32包括取料座321、第一直线驱动组件322、第二直线驱动组件323和夹持组件324,取料座321设置于载具31的一侧。第一直线驱动组件322连接于取料座321。第二直线驱动组件323连接于第一直线驱动组件322的输出端,第一直线驱动组件322能够驱动第二直线驱动组件323沿靠近或远离载具31的水平方向移动。夹持组件324连接于第二直线驱动组件323的输出端,第二直线驱动组件323能够驱动夹持组件324沿竖直方向移动,夹持组件324能够松开或夹持壳体。详细地,分离机构33将载具31的压接件313和定位件312分离,从而夹持组件324可以夹持载具31内的壳体,第二直线驱动组件323壳体上升,第一直线驱动组件322带动第二直线驱动组件323和壳体远离载具31,夹持组件324松开壳体,即完成壳体的下料。在一些可选的实施例中,第一直线驱动组件322和第二直线驱动组件323均为气缸。当然,在其他实施例中第一直线驱动组件322和第二直线驱动组件323也可以设置为其他形式,在此不进行限制。本实施例中优选地,夹持组件324为夹爪气缸。
72.进一步地,为了便于收集下料后的壳体,本实施例中的笑料装置还包括收集机构
34,收集机构34设置于取放料机构32的执行端下方。夹持组件324松开壳体后,壳体落入收集机构34内。在一些可选的实施例中,收集机构34为料盒。在其他实施例中,收集机构34还可以为输送带,通过输送带可以直接将壳体输送至下一工序。
73.本实施例还提供了一种自动焊接设备,用于自动焊接第一壳体100和第二壳体200,如图1至图3所示,自动焊接设备包括工作台1、转动设置于工作台1上的旋转盘2、同轴设置于旋转盘2的上方的固定盘8以及若干上述的载具31,若干载具31沿旋转盘2的边缘周向间隔设置,固定盘8相对工作台1固定,且固定盘8的直径小于旋转盘2。该自动焊接设备还包括设置于工作台1上且依次围绕旋转盘2设置的第一上料裁切装置4、第一折料装置5、第二折料装置6、焊接装置15、上述的取放料机构32以及设置于第二折料装置6的一侧的第二上料裁切装置7和若干上述的分离机构33。固定盘8的外缘对应第一上料裁切装置4、第二折料装置6和取放料机构32分别设置有分离机构33。
74.其中,第一上料裁切装置4能够输送第一壳体100,并能够将输出端的第一壳体100和与其相邻的第一壳体100之间的料带分离后输送至第一上料工位处的载具31上。第一折料装置5能够去除旋转至折料工位处的载具31上的第一壳体100连接的料带。第二上料裁切装置7能够输送第二壳体200,并能够将输出端的第二壳体200和与其相邻的第二壳体200之间的料带分离后输送至第二折料装置6。第二折料装置6能够去除第二壳体200上的料带并将第二壳体200输送至第二上料工位处的载具31上。焊接装置15用于焊接旋转至焊接工位处的载具31上的第一壳体100和第二壳体200。取放料机构32能够将旋转至下料工位处的载具31上的第一壳体100和第二壳体200取出。分离机构33能够分别将第一上料工位处、第二上料工位处和下料工位处的载具31的定位件312和压接件313分离,可以理解的是,第一上料裁切装置4将第一壳体100输送至第一上料工位处的载具31上时,需要先通过分离机构33将压接件313和定位件312分离,才能将第一壳体100放置于定位件312上,第一壳体100放置完成后,压接件313复位,将第一壳体100夹紧。同样地,第二折料装置6将第二壳体200输送至第二上料工位处时,需要先通过分离机构33将压接件313和定位件312分离,才能将第二壳体200放置于定位件312上的第一壳体100上,第二壳体200放置完成后,压接件313复位,将第二壳体200夹紧在第一壳体100上。对焊接后的第一壳体100和第二壳体200下料时,需要先通过分离机构33将压接件313和定位件312分离,才能将第一壳体100和第二壳体200下料从载具31上取出。本实施例中的自动焊接设备实现了对第一壳体100和第二壳体200的自动焊接,从而能够提高焊接效率,并提高了焊接的一致性。
75.详细地,旋转盘2在间歇旋转驱动机构的驱动下实现间歇旋转,在一些可选的实施例中,间歇旋转驱动机构包括电机、传动组件和凸轮分割器,电机和凸轮分割器均连接于工作台1,电机通过传动组件连接于凸轮分割器的输入端,旋转盘2连接于凸轮分割器的输出端,固定盘8连接于凸轮分割器上的固定部。在一些可选的实施例中,传动组件包括第一带轮、第二带轮和传动带,第一带轮设置于电机的输出轴,第二带轮设置于凸轮分割器的输入轴,传动带绕设在第一带轮和第二带轮上。
76.为了避免固定盘8移动,如图4所示,本实施例中的自动焊接设备还包括第一定位架12和第二定位架13,第一定位架12的一端连接于工作台1,另一端连接于固定盘8。第二定位架13的一端连接于工作台1,另一端连接于固定盘8。通过第一定位架12和第二定位架13固定固定盘8,使固定盘8相对工作台1固定,从而可以避免因间歇旋转驱动机构的移动而造
成固定盘8的移动,进而避免了对载具31的反复定位。
77.为了便于对载具31定位,如图4、图6和图7所示,载具31与旋转盘2可拆卸连接,本实施例中优选地,载具31和旋转盘2通过螺栓连接。载具31上开设有至少两个间隔设置的定位孔3112,自动焊接设备还包括矫正装置14。矫正装置14包括校正块141和校正柱142,校正块141固定于旋转盘2上方,校正块141上开设有与每个载具31上的定位孔3112一一对应的校正孔。每个校正柱142能够依次插设于校正孔、定位孔3112。对载具31的位置进行矫正时,将旋转盘2旋转一定角度,松开载具31上的螺栓,通过校正柱142依次穿过校正孔和定位孔3112,然后锁紧载具31上的螺栓,在此过程中,手动移动校正柱142时,校正柱142能够无阻力的滑动,此工位的载具31校准完毕后,取出校正柱142,再将旋转盘2按照相同的方向旋转相同的角度后停止,重复上述的操作,直到所有载具31矫正完毕。
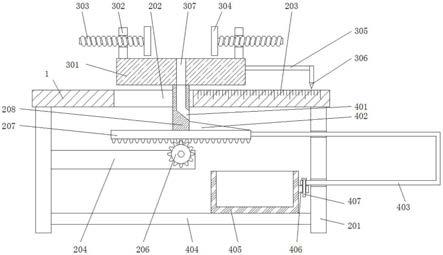
78.如图9至图12所示,第一上料裁切装置4包括底座41、上料机构42和裁切机构43,底座41设置于工作台1上,上料机构42包括输料组件421,输料组件421设置于底座41上,输料组件421能够间歇输送通过料带依次连接的第一壳体100至预设位置。裁切机构43连接于底座41,裁切机构43的执行端位于输料组件421的输出端,裁切机构43能够将输料组件421输出端的第一壳体100和与其相邻的第一壳体100之间的料带分离,实现了第一壳体100的自动上料。
79.具体地,输料组件421包括输料支座4211、输料底板4212、输料上盖4213和输料驱动结构4215,输料支座4211连接于底座41。输料底板4212设置于输料支座4211顶部,输料上盖4213设置于输料底板4212顶部,且输料底板4212和输料上盖4213之间形成供第一壳体100穿设的导向通道4214,能够对第一壳体100进行导向。输料驱动结构4215连接于输料支座4211,输料驱动结构4215能够驱动导向通道4214内的第一壳体100间歇移动,从而能够向裁切机构43持续输送第一壳体100。
80.在一些可选的实施例中,输料驱动结构4215包括输料驱动件42151、拨料组件42152和顶升块42154,输料驱动件42151连接于输料支座4211。拨料组件42152通过连接板42153连接于输料驱动件42151的执行端,输料上盖4213上开设有避让槽42131,拨料组件42152的底端贯穿避让槽42131,输料驱动件42151能够驱动拨料组件42152沿第一壳体100的输送方向移动,拨料组件42152的底端穿过避让槽42131能够带动料带沿输送方向移动。顶升块42154活动嵌设于输料底板4212内,拨料组件42152沿输送方向的反向移动时,顶升块42154能够将料带弹性抵接于输料上盖4213的底面,使料带停止移动,防止输料驱动件42151驱动拨料组件42152沿第一壳体100的输送方向的反向移动时带动料带反向移动。
81.如图11和图12所示,拨料组件42152包括连接座421521和拨块421522,连接座421521连接于连接板42153,连接座421521的底部开设有沿第一壳体100的输送方向延伸的第一连接槽4215211。拨块421522顶部设置于第一连接槽4215211内,拨块421522顶部背离第一壳体100的输送方向的一端转动连接于连接座421521,另一端与第一连接槽4215211的槽底之间设置有第一弹性件,拨块421522的底部位于输料上盖4213的顶部,拨块421522的底端形成有用于穿过避让槽42131驱动料带的拨片,拨片的底端形成有与料带上的定位孔3112配合的尖端。拨料组件42152驱动第一壳体100向第一壳体100的输送方向移动时,拨片的尖端在第一弹性件的作用下,伸入至定位孔3112内,并带动第一壳体100向第一壳体100的输送方向移动,拨料组件42152驱动第一壳体100反向移动时,拨片克服第一弹性件的压
力,不会伸入到定位孔3112内,同时,顶升块42154受到的弹性顶升力大于第一弹性件的压力,从而使拨片反向移动时,不能带动第一壳体100移动,实现了第一壳体100向输送方向的间歇移动。
82.进一步地,输料底板4212上开设有第二连接槽,顶升块42154设置于第二连接槽内,且顶升块42154的底面和第二连接槽的槽底之间设置有第二弹性件,顶升块42154的顶部具有活动穿设于输料上盖4213的导向孔内的导向部,顶升块42154的顶部具有用于抵接料带的台阶面421541,使得顶升块42154能够沿导向孔升降,同时又避免顶升块42154脱出第二连接槽内,进而使第一壳体100能够沿导向通道4214移动的同时,又能防止第一壳体100反向移动。
83.如图10和图11所示,裁切机构43包括裁切框架431、上裁切刀432、下裁切刀驱动组件433和第一下裁切刀434,裁切框架431连接于底座41。上裁切刀432连接于上料机构42,且位于上料机构42的输出端。下裁切刀驱动组件433连接于裁切框架431。第一下裁切刀434连接于下裁切刀驱动组件433的输出端且位于上裁切刀432的下方,下裁切刀驱动组件433能够驱动第一下裁切刀434靠近或远离上裁切刀432以与上裁切刀432配合裁切第一壳体100。可以理解的是,第一壳体100位于上裁切刀432和第一下裁切刀434之间,下裁切驱动组件驱动第一下裁切刀434靠近上裁切刀432时,在第一下裁切刀434和上裁切刀432配合下,将相邻两个第一壳体100之间的料带分离。
84.进一步地,如图11所示,下裁切刀驱动组件433包括裁切驱动件4331和连接块4332。裁切驱动件4331连接于裁切框架431。连接块4332竖直滑动连接于裁切框架431,第一下裁切刀434连接于连接块4332,连接块4332连接于裁切驱动件4331的输出端,裁切驱动件4331能够驱动连接块4332升降,从而带动第一下裁切刀434升降。
85.更进一步地,下裁切刀驱动组件433还包括滚轮4333和驱动块4334,滚轮4333转动连接于连接块4332。驱动块4334连接于裁切驱动件4331的输出端,驱动块4334顶面设置有倾斜面,滚轮4333滚动连接在驱动块4334的顶面,裁切驱动件4331能够驱动驱动块4334沿水平方向往复移动以使倾斜面与滚轮4333配合带动连接块4332升降,能够使连接块4332稳定地升降,从而使第一下裁切刀434能够稳定地升降。
86.为了便于上裁切刀432和第一下裁切刀434能够稳定地将相邻两个第一壳体100之间的料带分离,如图和图所示,裁切机构43还包括第一上压块435和压块驱动件436,第一上压块435设置于第一下裁切刀434的上方。压块驱动件436连接于裁切框架431,第一上压块435连接于压块驱动件436的执行端,压块驱动件436能够驱动第一上压块435靠近或远离第一下裁切刀434。裁切相邻两个第一壳体100之间的料带时,压块驱动件436驱动上压块向下移动,下裁切刀驱动组件433驱动第一下裁切刀434向上移动,第一壳体100夹持于第一下裁切刀434和第一上压块435之间,同时在第一下裁切刀434和上裁切刀432的共同作用下,将相邻两个第一壳体100之间的料带分离。在一些可选的实施例中,压块驱动件436为气缸。当然,在其他实施例中,还可以将压块驱动件436设置为其他驱动形式,在此不进行限制。
87.为了便于上料机构42的连续送料,如图9和图10所示,上料机构42还包括供料组件422,供料组件422设置于输料组件421的输入端,供料组件422能够向输料组件421供应通过料带依次连接的第一壳体100。
88.详细地,供料组件422包括料盘4221、输送轨道4222和料盘4221驱动件,料盘4221
驱动件通过料架固定在工作台1上,料盘4221连接于料盘4221驱动件的输出端,料盘4221驱动件能够驱动料盘4221旋转。输送轨道4222连接于料架并位于料盘4221的下方,输送轨道4222的输出端和输料组件421的输入端连接。
89.特别地,如图11所示,本实施例中的第一上料裁切装置4还包括第一推送机构44,第一推送机构44连接于底座41,裁切机构43滑动连接于底座41,第一推送机构44能够驱动裁切机构43沿第一壳体100的输送方向往复移动,能够便于将裁切后的第一壳体100输送至载具31上。具体地,分离装置将压接件313的压接端和定位件312分离,第一推送机构44将第一壳体100输送至载具31,然后第一上料裁切装置4复位,分离装置松开压接件313,使压接件313的压接端压接在定位于载具31上的第一壳体100上以将第一壳体100压紧。
90.通过第一上料裁切装置4将第一壳体100输送至载具31上后,定位有第一壳体100的载具31旋转至折料工位处后,通过第一折料装置5对第一壳体100上的料带进行折料。
91.如图13和图14所示,第一折料装置5包括第一弯折座51、第一弯折驱动机构52和第一夹持机构53,第一弯折座51设置于工作台1上,第一弯折驱动机构52连接于第一弯折座51,第一夹持机构53连接于第一弯折驱动机构52的输出端,第一弯折驱动机构52能够驱动第一夹持机构53摆动,第一夹持机构53具有夹爪。折料时,第一夹持机构53的夹爪夹持折料工位处的第一壳体100连接的料带,第一弯折驱动机构52驱动第一夹持机构53摆动,通过往复弯折第一壳体100上的料带而将该料带和第一壳体100分离。
92.进一步地,如图14和图15所示,第一弯折驱动机构52包括第一弯折驱动组件521、第一驱动板522和第一限位件523,第一弯折驱动组件521连接于第一弯折座51。第一驱动板522连接于第一弯折驱动组件521的输出端,第一弯折驱动组件521能够驱动第一驱动板522往复移动,第一夹持机构53连接于第一驱动板522。第一限位件523连接于第一弯折座51或第一弯折驱动组件521的固定部,第一限位件523沿垂直于第一驱动板522的移动方向限位第一驱动板522。
93.在一些可选的实施例中,第一弯折驱动组件521包括第一旋转驱动部5211和第一偏心轮5212。第一旋转驱动部5211连接于第一弯折座51。第一偏心轮5212套设在第一旋转驱动部5211的输出轴上,第一驱动板522上开设有第一腰形槽5221,第一偏心轮5212穿设在第一腰形槽5221内,第一腰形槽5221沿垂直于第一驱动板522的移动方向延伸。第一旋转驱动部5211驱动第一偏心轮5212旋转,通过第一偏心轮5212和第一腰形槽5221的配合,实现第一驱动板522的升降。
94.为了在第一折料装置5弯折第一壳体100的料带时,能够将第一壳体100稳定固定,防止第一壳体100在折弯过程中变形,如图13、图14和图17所示,本实施例中的自动焊接设备还包括抵压装置11,抵压装置11设置于固定盘8的外缘且对应第一折料装置5,抵压装置11能够抵压于折料工位处的载具31固定的第一壳体100上。
95.在一些可选的实施例中,抵压装置11包括抵压座111、抵压驱动机构112和抵压部113,第一座连接于固定盘8,抵压驱动机构112连接于抵压座111,抵压部113连接于抵压驱动机构112的执行端。可以理解的是,抵压驱动机构112驱动抵压部113下压时,抵压部113能够抵压在第一壳体100上,从而能够将第一壳体100稳定地固定。
96.如图4所示,本实施例中的自动焊接设备还包括第二检测装置10,第二检测装置10设置于工作台1上,且位于第一折料装置5和第二折料装置6之间,第二检测装置10被配置为
检测第二检测工位处的载具31上是否装有第一壳体100。在一些可选的实施例中,第二检测装置10包括红外传感器。红外传感器设置在第一定位架12上,且位于第一检测工位处的载具31上方。当然,在其他实施例中第二检测装置10也可以设置为其他形式,在此不进行限制。
97.进一步地,第二上料裁切装置7的结构和第一上料裁切装置4的结构相同,在此不进行赘述。
98.如图18和图19所示,第二折料装置6包括中转夹持机构62和弯折机构61,中转夹持机构62设置于第二上料裁切装置7的一侧,第二上料裁切装置7的第二推送机构71能够将第二上料裁切装置7裁切后的第二壳体200输送至中转夹持机构62。弯折机构61设置于中转夹持机构62的一侧,弯折机构61能够去除中转夹持机构62夹持的第二壳体200上的料带。
99.为了提高第二壳体200上料的效率,中转夹持机构62设置有两个,第二折料装置6还包括中转旋转驱动机构63,中转旋转驱动机构63设置于第二上料裁切装置7的一侧,两个中转夹持机构62分别通过中转板对称设置于中转旋转驱动机构63的输出端。详细地,两个中转夹持机构62中的一个和第二上料裁切装置7配合,将第二上料裁切装置7裁切后的第二壳体200输送至中转夹持机构62,另一个中转夹持机构62与第二折料装置6配合,完成对第二壳体200的料带的去除,提高了第二壳体200上料的效率。
100.进一步地,中转夹持机构62包括夹块平移驱动件624、夹块升降驱动件621、上夹块622和下夹块623,夹块平移驱动件624连接于中转板64,夹块升降驱动件621连接于夹块平移驱动件624的执行端,夹块平移驱动件624能够驱动夹块升降驱动件621水平移动。上夹块622连接于夹块升降驱动件621的执行端,下夹块623连接于中转板64且位于上夹块622的下方,上夹块622朝向下夹块623的一侧开设有真空吸孔,真空吸孔连接于抽真空装置。夹块升降驱动件621能够驱动上夹块622靠近或远离下夹块623。可以理解的是,第二上料裁切装置7的第二推送机构71带动第二上压块和第二下裁切刀将第二壳体200推送至下夹块623上,夹块升降驱动件621驱动上夹块622下压,并压紧第二壳体200,中转旋转驱动机构63驱动中转板64旋转,带动第二壳体200转动至预设位置,第二折料装置6将第二壳体200上的料带弯折下来,夹块升降驱动件621带动上夹块622上抬,同时上夹块622通过真空吸孔吸附第二壳体200,夹块平移驱动件624动作带动上夹块622平移,将第二壳体200放入位于第二上料工位处的载具31上的第一壳体100上,实现第二壳体200的上料。
101.如图19和图20所示,弯折机构61包括第二弯折座611、第二弯折驱动结构612和第二夹持机构613,第二弯折座611设置于中转夹持机构62的一侧、第二弯折驱动结构612连接于第二弯折座611。第二夹持机构613连接于第二弯折驱动结构612的输出端,第二弯折驱动结构612能够驱动第二夹持机构613摆动,第二夹持机构613具有夹爪。
102.在一些可选的实施例中,第二弯折驱动结构612包括第二弯折驱动组件6121、第二驱动板6122和第二限位件6123,第二弯折驱动组件6121连接于第二弯折座611,第二驱动板6122连接于第二弯折驱动组件6121的执行端,第二弯折驱动组件6121能够驱动第二驱动板6122往复移动,第二夹持机构613连接于第二驱动板6122。第二限位件6123连接于第二弯折座611或第二弯折驱动组件6121的固定部,第二限位件6123沿垂直于第二驱动板6122的移动方向限位第二驱动板6122。进一步地,第二弯折驱动组件6121包括第二旋转驱动部61211和第二偏心轮61212。第二旋转驱动部61211连接于第二弯折座611。第二偏心轮61212套设
在第二旋转驱动部61211的输出轴上,第二驱动板6122上开设有第二腰形槽61221,第二偏心轮61212穿设在第人腰形槽内,第二腰形槽61221沿垂直于第二驱动板6122的移动方向延伸。第二旋转驱动部61211驱动第二偏心轮61212旋转,通过第二偏心轮61212和第二腰形槽61221的配合,实现第二驱动板6122的升降。
103.优选地,焊接装置15为激光镭射焊接装置15,焊接效率高。
104.如图2和图3所示,本实施例中的自动焊接设备还包括第一检测装置9,第一检测装置9设置于焊接装置15背离第二折料装置6的一侧,第一检测装置9被配置为获取第一检测工处位的载具31上固定的第一壳体100和第二壳体200的图像信息。通过获取的图像信息检测第一壳体100和第二壳体200焊接后有无假焊或虚焊现象,以及检测焊接后第一壳体100和第二壳体200是否因功率太大而被击穿。详细地,第一检测装置9包括设置于第二检测工位处的上ccd和下ccd,上ccd设置于第二检测工位处的载具31上方,下ccd设置于第二检测工位处的载具31下方。
105.为了在对第一壳体100和第二壳体200进行焊接时,能够对第一壳体100和第二壳体200的非焊接区域进行保护,本实施例中的自动焊接设备还包括防护装置16,防护装置16设置于旋转盘2上方且对应于焊接工位处的载具31,以防护载具31固定的第一壳体100和第二壳体200的非焊接处。在一些可选的实施例中,防护装置16包括防护板161和遮蔽机构162,防护板161设置于焊接装置15和第一检测装置9之间,防止焊渣飞溅到上ccd和下ccd的镜片而影响检测结果。
106.进一步地,遮蔽机构162包括遮蔽件1621和遮蔽驱动件1622,遮蔽驱动件1622连接于固定板,遮蔽件1621连接于遮蔽驱动件1622的输出端,遮蔽驱动件1622能够驱动遮蔽件1621靠近或远离位于焊接工位处的载具31。对焊接工位处的第一壳体100和第二壳体200进行焊接时,遮蔽驱动件1622驱动遮蔽件1621移动至焊接工位处的载具31上方,能够对第一壳体100和第二壳体200的非焊接处进行防护,焊接完成后,遮蔽驱动件1622驱动遮蔽件1621远离载具31以备下一个位于焊接工位处的第一壳体100和第二壳体200的防护。
107.使用本实施例中的自动焊接设备时,旋转旋转盘2,通过第一上料裁切装置4输送第一壳体100,并将第一壳体100和与其相邻的第一壳体100之间的料带分离后输送至第一上料工位处的载具31上。然后,第一折料装置5去除旋转至折料工位处的载具31上的第一壳体100连接的料带。载具31旋转至第一检测工位后,通过第一检测装置9检测载具31上是否安装有第一壳体100。第二上料裁切装置7输送第二壳体200,并将第二壳体200和与其相邻的第二壳体200之间的料带分离后输送至第二折料装置6。第二折料装置6去除第二壳体200上的料带并将第二壳体200输送至旋转至第二上料工位处的载具31上,且将第二壳体200放置于第一壳体100上。载具31旋转至焊接工位后,焊接装置15对第一壳体100和第二壳体200进行焊接。焊接完成后,旋转盘2将载具31旋转至第二检测工位,第二检测装置10对焊接后的第一壳体100和第二壳体200进行检测。检测完成后,旋转盘2将载具31旋转至下料工位,完成对第一壳体100和第二壳体200的焊接。本实施例中的自动焊接设备实现了对第一壳体100和第二壳体200的自动焊接,提高了焊接效率,并提高了焊接的一致性。
108.以上结合具体实施例描述了本实用新型的技术原理。这些描述只是为了解释本实用新型的原理,而不能以任何方式解释为对本实用新型保护范围的限制。基于此处的解释,本领域的技术人员不需要付出创造性的劳动即可联想到本实用新型的其它具体实施方式,
这些方式都将落入本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。