技术特征:
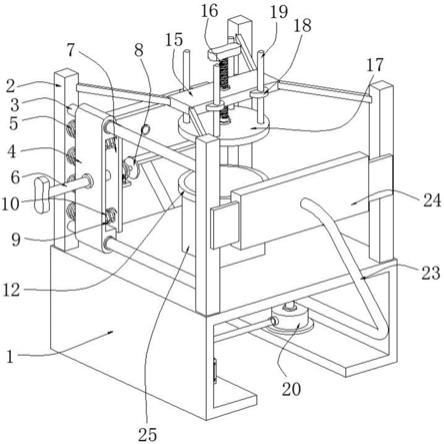
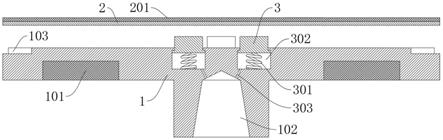
1.一种制鞋全自动双工位打磨设备,其特征在于:它包含下机柜及电控箱(1)、触屏操作界面(3)、上机保护罩(4)、除灰收纳箱(5)、六轴智能机器人(6)、移动模组机构(7)、通用性制鞋夹持机构(8)和除尘机视觉检测机构(9);下机柜及电控箱(1)内设有移动模组机构(7),移动模组机构(7)上活动连接有通用性制鞋夹持机构(8),位于移动模组机构(7)后侧的下机柜及电控箱(1)的台面上固定有六轴智能机器人(6),六轴智能机器人(6)的输出端上连接有除尘机视觉检测机构(9);所述的上机保护罩(4)罩设在移动模组机构(7)、通用性制鞋夹持机构(8)、六轴智能机器人(6)以及除尘机视觉检测机构(9)的外部,上机保护罩(4)的前侧面开设有产品上料口(2);位于产品上料口(2)上部份上机保护罩(4)上固定有触屏操作界面(3);下机柜及电控箱(1)的后侧固定有除灰收纳箱(5);所述的移动模组机构(7)由伺服电机(7
‑
1)、减速机(7
‑
2)、传动模组(7
‑
3)和拖链(7
‑
4)构成;下机柜及电控箱(1)内并列设有两个传动模组(7
‑
3),每个传动模组(7
‑
3)的顶端均与减速机(7
‑
2)连接,减速机(7
‑
2)与伺服电机(7
‑
1)的输出端连接,传动模组(7
‑
3)中的滑块上连接有通用性制鞋夹持机构(8),且拖链(7
‑
4)的一端与滑块固定,拖链(7
‑
4)的另一端固定在传动模组(7
‑
3)的侧边。2.根据权利要求1所述的一种制鞋全自动双工位打磨设备,其特征在于:所述的通用性制鞋夹持机构(8)由模组连接座(8
‑
1)、气缸固定板(8
‑
2)、夹持薄型气缸(8
‑
3)、联动杆(8
‑
4)、钣金延伸座(8
‑
5)、prid代码识别器安装罩(8
‑
6)、楦头(8
‑
7)、识别有无产品传感器(8
‑
8)、传感器座(8
‑
9)、传感器延伸座(8
‑
10)、气缸l型快接头(8
‑
11)、连接侧板(8
‑
12)、楦头夹持器(8
‑
13)、 prid代码识别器(8
‑
14)和prid代码识别器安装座(8
‑
15)构成;模组连接座(8
‑
1)固定在传动模组(7
‑
3)中的滑块上,模组连接座(8
‑
1)上固定有气缸固定板(8
‑
2),气缸固定板(8
‑
2)上固定有夹持薄型气缸(8
‑
3),夹持薄型气缸(8
‑
3)的输出端上对称铰接有联动杆(8
‑
4),联动杆(8
‑
4)的另一端与楦头夹持器(8
‑
13)铰接,楦头夹持器(8
‑
13)的下边缘铰接在相对设置的两个连接侧板(8
‑
12)的底部;两个连接侧板(8
‑
12)均固定在气缸固定板(8
‑
2)上,其中一个连接侧板(8
‑
12)的外侧上部固定有钣金延伸座(8
‑
5),钣金延伸座(8
‑
5)上固定有prid代码识别器安装罩(8
‑
6),位于prid代码识别器安装罩(8
‑
6)内的钣金延伸座(8
‑
5)上固定有prid代码识别器安装座(8
‑
15),prid代码识别器安装座(8
‑
15)上固定有prid代码识别器(8
‑
14);另一个连接侧板(8
‑
12)的外侧壁上由下至上分别固定有气缸l型快接头(8
‑
11)和传感器延伸座(8
‑
10),传感器延伸座(8
‑
10)上固定有传感器座(8
‑
9),传感器座(8
‑
9)上固定有识别有无产品传感器(8
‑
8);上述楦头(8
‑
7)架设在两个连接侧板(8
‑
12)的顶端,且与楦头夹持器(8
‑
13)的上边缘活动卡设。3.根据权利要求1所述的一种制鞋全自动双工位打磨设备,其特征在于:所述的除尘机视觉检测机构(9)由机器人连接固定板(9
‑
1)、电机侧方保护板(9
‑
2)、电机上固定板(9
‑
3)、电机(9
‑
4)、电机中心转轴(9
‑
5)、电机连接件(9
‑
7)、检测薄型气缸(9
‑
8)、除尘管固定座(9
‑
9)、缸连接件(9
‑
10)、除尘管道(9
‑
11)、除尘保护罩(9
‑
12)、视觉相机保护罩(9
‑
13)、相机主体(9
‑
14)、视觉相机镜头(9
‑
15)、打磨头(9
‑
16)和吸尘器(9
‑
17)构成;机器人连接固定板(9
‑
1)固定在六轴智能机器人(6)的输出端上,机器人连接固定板(9
‑
1)的下表面两侧均固定有电机侧方保护板(9
‑
2),两个电机侧方保护板(9
‑
2)之间设有电机上固定板(9
‑
3),电机上固定板(9
‑
3)的底部固定有电机(9
‑
4),电机(9
‑
4)的底部固定有电机下固定板(9
‑
6),电机下固定板(9
‑
6)的一侧利用缸连接件(9
‑
10)与检测薄型气缸(9
‑
8)的输出端铰接,检测薄
型气缸(9
‑
8)固定在机器人连接固定板(9
‑
1)的底部,电机(9
‑
4)的两侧利用电机中心转轴(9
‑
5)旋接在两侧的电机侧方保护板(9
‑
2)上,电机(9
‑
4)的输出端连接有电机连接件(9
‑
7),电机连接件(9
‑
7)上连接有打磨头(9
‑
16);位于打磨头(9
‑
16)的一侧设有除尘保护罩(9
‑
12),除尘保护罩(9
‑
12)贯通连接有除尘管道(9
‑
11),除尘管道(9
‑
11)利用除尘管固定座(9
‑
9)固定在视觉相机保护罩(9
‑
13)内,且除尘管道(9
‑
11)另一端与吸尘器(9
‑
17)连接,吸尘器(9
‑
17)固定在下机柜及电控箱(1)的侧壁上;上述视觉相机保护罩(9
‑
13)内固定有相机主体(9
‑
14),相机主体(9
‑
14)上连接有视觉相机镜头(9
‑
15)。
技术总结
一种制鞋全自动双工位打磨设备,本实用新型涉及制鞋设备技术领域,下机柜及电控箱内设有移动模组机构,移动模组机构上活动连接有通用性制鞋夹持机构,位于移动模组机构后侧的下机柜及电控箱的台面上固定有六轴智能机器人,六轴智能机器人的输出端上连接有除尘机视觉检测机构;所述的上机保护罩罩设在移动模组机构、通用性制鞋夹持机构、六轴智能机器人以及除尘机视觉检测机构的外部,上机保护罩的前侧面开设有产品上料口。可随时调整打磨头机构的压力值,使接触面可柔性而均匀打磨,打磨后除尘收纳,自动通过吸尘管道输出到除尘收纳柜内;生产效率高;能够代替人工作业,减少人工的劳动力,稳定;实用性高。实用性高。实用性高。
技术研发人员:王俊
受保护的技术使用者:深圳市云客智慧科技有限公司
技术研发日:2021.03.15
技术公布日:2021/11/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。